
Fターム[3C007KW01]の内容
マニピュレータ、ロボット (46,145) | センサ (216) | 接触センサ (52)
Fターム[3C007KW01]に分類される特許
1 - 20 / 52
脚式ロボット、その制御方法、及び制御プログラム
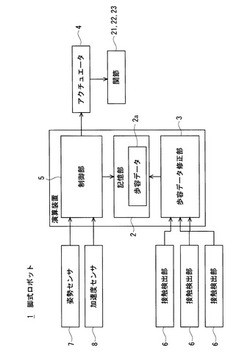
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
把持装置

【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
ロボット
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボット100は、アーム103L,103Rと、アーム103L,103Rに設けられ、アーム103L,103Rを駆動させるアクチュエータAc2〜Ac8と、アーム103L,103Rの内最も基端側に位置するアクチュエータAc2,Ac9の基部に設けられたセンサ固定治具121と、センサ固定治具121に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122とを有する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
触覚センサシステム
【課題】触覚センサの配置密度が部位毎に異なるロボットに、触覚センサからの出力信号を情報統合装置へ中継する中継装置を配置するに際し、中継装置の好適な配置態様を提供する。
【解決手段】ヒューマノイドロボット1の触覚センサシステム100は、ヒューマノイドロボット1のロボット本体2の表面に配置された複数のセンサノード200と、複数のセンサノード200から出力された出力信号を中継する中継部401を有するリレーノード120と、リレーノード120の中継部401によって中継された出力信号を受信して処理するホストノード140と、を備える。複数のセンサノード200をヒューマノイドロボット1のロボット本体2の部位に応じて少なくとも2つ以上の区分に区分し、各区分毎に、リレーノード120を配置した。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
把持搬送装置および把持搬送方法
【課題】把持機構を支持する支持移動体と障害物の衝突を検知できるとともに、衝突時のオーバートラベル量による支持移動体の損傷を防止できる把持搬送装置を提供する。
【解決手段】支持移動体5の外面に取り付けられる衝撃吸収センサ9を備える。衝撃吸収センサ9は、弾性体と、該弾性体に組み込まれた衝突検出部と、を有する。衝突検出部は、該弾性体の弾性変形により衝突信号を出力する。衝突信号を受けることで、前記支持移動体5の移動を停止させる制御を行う制御装置11をさらに備える。支持移動体5が設定速度で移動している時に衝突信号が出力されてから、支持移動体5が停止するまでに支持移動体5が移動する距離をオーバートラベル量として、弾性体の最大弾性変形量は、オーバートラベル量以上である。
(もっと読む)
ロボットの接触種類判別システム
【課題】簡単な構成で接触の種類を判別することができるロボットの接触種類判別システムを提供する。
【解決手段】本発明に係るロボットの接触種類判別システム100は、ロボット1への接触によって外力が作用する際に、接触の種類を判別する接触種類判別システムである。接触種類判別システム100は、ロボット1に搭載された、外力の力学特性を示す3軸方向以上の成分を検出する第1の検出部110と、第1の検出部110の検出結果に基づいて特徴量を算出する特徴量算出部152と、特徴量と予め接触の種類に対応するように取得したサンプル特徴量とをパターンマッチングし、ロボット1への接触の種類を判別する接触種類判別部153と、を備える。
(もっと読む)
静電容量型センサおよびセンサ取付構造
【課題】柔軟で、荷重の測定レンジが広い静電容量型センサを提供することを課題とする。
【解決手段】静電容量型センサ5は、エラストマー製であって、積層方向のばね定数が異なる複数の誘電層500、501が積層されてなる誘電体50と、誘電体50の表側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する表側電極01X〜12Xと、誘電体50の裏側に配置され、エラストマーと、エラストマーに充填される導電性フィラーと、を有する裏側電極01Y〜12Yと、を備える。
(もっと読む)
接触検出装置および接触検出装置を適用したロボットシステム
【課題】ノイズに強く、アプリケーションに応じて接触検出器の数の増減が容易で、接触位置も特定可能な接触検出装置を提供する。
【解決手段】 2接点スイッチと抵抗値のそれぞれ異なる抵抗器から構成される複数の接触検出器を、リファレンス電源線、アース線および信号線からなる接続ケーブルで信号処理部に接続する。信号線には接触有無と接触時のその位置を表す信号が検出され、この信号から信号処理部で接触状態と接触位置を判別し検出する。また、この接触検出装置をロボットの腕、胴、頭など各部位に装着しその接触状態を検出する。
(もっと読む)
触覚センサおよびそれを備えたロボット
【課題】検知部の破損および弾性部材の剥離を防止可能な触覚センサを提供する。
【解決手段】触覚センサ10は、基板1と、酸化膜2と、検知部3(31,32)と、弾性部材4と、金属プレート5とを備える。酸化膜2は、基板1上に形成される。検知部3(31,32)は、酸化膜2上に配置される。弾性部材4は、金属プレート5から突出した突出部41,42を有する。弾性部材4は、突出部41,42がそれぞれ検知部31,32を覆うように基板1および酸化膜2上に配置される。金属プレート5は、弾性部材4の突出部41,42と所望の間隔を隔てて突出部41,42の周囲および弾性部材4上に配置される。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
移動ロボット
【課題】 移動ロボットのボディが物体に接触した場合を直ちに検知できるとともに、物体と移動ロボットとの接触で作用する力を緩衝することができる移動ロボットを得る。
【解決手段】 移動ロボット本体部の少なくとも下部の周囲を覆うカバーと、カバーの上部を移動ロボット本体部のフレームに、該カバーの面方向において可動に取り付けるカバー上部支持部と、前記カバーの下部を移動ロボット本体部のフレームに、弾性支持するカバー下部支持部と、前記カバーの変位を検出することで、移動ロボットが物体へ接触したことを検知する検知部とを有する。
(もっと読む)
接触検出装置及びロボット
【課題】外部から加えられる力に対する接触センサの耐久性を従来よりも高めること。
【解決手段】ロボットに対する物体の接触を検出する接触検出装置であって、ベース層51と、ベース層51上に積層されると共に、少なくとも部分的に粗面を有する抵抗層52と、抵抗層52上に積層されると共に、抵抗層52の粗面に対応する粗面を有する抵抗層54と、ベース層51上に積層されると共に、抵抗層52、54間に層間空間を形成するスペーサ層53と、を備え、抵抗層52、54間の間隔は、抵抗層52、54の少なくとも一方の変形時、抵抗層52の粗面と抵抗層54の粗面間に摩擦が生じるように設定されている。この構成を採用することによって、外部から加えられる力に対する接触センサの耐久性を従来よりも高めることができる。
(もっと読む)
触覚センサー装置およびそれを用いたロボット
【課題】より正確な力の検出が可能な触覚センサー装置およびそれを用いた構造が簡単で小型のロボットを得ること。
【解決手段】触覚センサー81,82の検出期間がそれぞれ異なるので、他の触覚センサー81または82の振動の伝達による検出時のSN比の低下を抑えることができる。したがって、より正確な力の検出が可能な触覚センサー装置1000を得ることができる。また、触覚センサー81,82を順次駆動するので配線が少なくてすみ、前述の効果を備え、構造が簡単で小型のロボット100を得ることができる。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
触行動認識装置及び触行動認識方法、情報処理装置、並びにコンピューター・プログラム
【課題】機器が外環境と1以上の箇所で接触した際に特定の触行動を認識する。
【解決手段】前処理として、複数の接触点をクラスタリングし、1つのパターンとみなせる接触点を群として抽出し、さらに各接触点群について複数の特徴量を抽出する。次いで、自己組織化マップを重層的に用いることによって、非線形且つ組み合わせ可能な触行動認識を行なう。全身に触覚を分布させたロボットに対する接触インタラクションや接触検出デバイスを介して、複数の指の特徴的な動きによる機器操作に適用することができる。
(もっと読む)
指骨接触ロードセル
【課題】許容される大きさで、一軸を超えて作用するロボットの手の指が受ける負荷を測定するセンサーを提供する。
【解決手段】ロボットシステムの指骨に掛かる負荷を測定する接触ロードセル10は、指骨にそのロードセル10を搭載するのに使用できる第一及び第二端部30,34と、中央部32とを有しているフレキシブルひずみ素子12を備えている。ひずみ素子12は、また、第一端部30及び中央部32に接続される少なくとも3つの部位を有する第一S形状部材110と、第二端部34及び中央部32に接続される少なくとも3つの部位を有する第二S形状部材112とを備えている。ロードセル10は、また、8対のひずみゲージを備えており、そのひずみゲージの各対は、各S形状部材110、112の各部位の1つの対向する両面に搭載されており、ひずみゲージの各対は、6つの自由度におけるひずみ測定値を提供している。
(もっと読む)
1 - 20 / 52
[ Back to top ]