
Fターム[3C007LU08]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 力制御 (227) | 押付け力の制御 (43)
Fターム[3C007LU08]に分類される特許
1 - 20 / 43
加工ロボットの軌道追従装置と方法
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
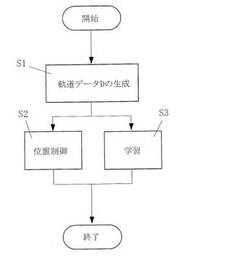
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
粗倣い制御を行うロボットの制御装置

【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
加工ロボット及びその重力補償方法
【課題】重力補償の精度を高め、かつ、計測動作時において工具とワークとの衝突を避け、さらに、計測時間を短縮することを可能とした加工ロボット及びその重力補償方法を提供する。
【解決手段】外力を計測する力センサ15を備えた工具12を用い、加工中に工具12に作用する加工反力を計測しながらワーク1を加工する加工ロボット10の重力補償方法であって、加工軌道をCAMによって生成し、ワーク1の加工前に、加工軌道と干渉しない範囲で準備した計測軌道において、工具12を加工時の姿勢で動作させ、その際の力センサ15の計測値をオフセット値として記憶し、ワーク加工時に、加工軌道上の同一の姿勢におけるオフセット値を、加工中の力センサ15の計測値から差し引いて、加工反力を算出し、加工反力を用いて、工具12の押付力を制御しながらワーク1に倣って加工する。
(もっと読む)
力制御装置
【課題】力制限を超過した際にロボットを停止処理する場合においても、作用力が許容値以下となる制約を満たす範囲で、動作時間の短縮化、立上げ調整時間の短縮化を図る。
【解決手段】対象物に対するロボットの目標位置指令を生成する指令生成手段(10)と、目標位置指令に応じて追従制御を行うロボット制御手段(20)と、対象物からロボットへ働く作用力が所定の力制限値を超過した場合に停止指令を生成する力制限超過判別手段(30)と、ロボットを減速停止させる場合を考慮して、対象物の特性および所定の力制限値に基づいて、減速停止中において作用力が所定の許容値以下になる制約を満たす範囲で動作速度を最大にする最適速度を算出する速度最適化手段(40)とを備え、指令生成手段(10)は、最適速度に応じた目標位置指令を生成し、停止指令を受信した場合には、ロボットを減速停止させる指令を生成する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
脚式移動ロボットの目標運動評価装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標運動を生成する場合に、生成した目標運動が適切に実現し得る目標運動であるか否かの評価を効率よく適切に行なう。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1全体の目標運動のうちの並進運動を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を第1A必要条件と第1B必要条件とを少なくとも満足するように算出する。この仮想面必要並進力に基づいて、目標運動を評価する。
(もっと読む)
脚式移動ロボットの外力目標生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でロボットの運動を行いながら、ロボットに作用させるべき外力(並進力)の目標値を適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を相互の姿勢関係が予め定められた仮想面S3a,S2a,S2bで近似し、これらの仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を、その垂直抗力成分及び摩擦力成分に関する第1A必要条件、第1B必要条件、第2必要条件を少なくとも満足するように決定する。決定した仮想面必要並進力に基づいて、各仮想面に対応する接触対象面からロボット1に作用させるべき目標並進力を決定する。
(もっと読む)
インピーダンス制御パラメータの調整装置および調整方法
【課題】 インピーダンス制御の複数のパラメータを個人のスキルに依存することなく、特別な知識を有していなくても、常に最適なパラメータを調整できるようにする。
【解決手段】 パラメータ初期値算出部117と力指令印加部111と評価基準計測部112と許容値設定部113と粘性パラメータ探索部114と終了判断部115と慣性パラメータ調整部116を備え、力指令印加部11はインピーダンス制御部に対して力指令を入り切りし、評価基準計測部112は力応答の整定時間とオーバシュート量と振動回数を計測し、許容値設定部113はオーバシュート量と整定時間の許容値を設定し、粘性パラメータ探索部114は整定時間が最小となる粘性パラメータを探索し、終了判断部115は調整値と許容値を比較して処理の終了あるいは継続を判断し、慣性パラメータ調整部116はオーバシュート量と整定時間の調整値に応じて慣性パラメータを調整する。
(もっと読む)
加工ロボットシステム
【課題】流体圧シリンダ装置を介して加工工具とワークとを押し付けながら加工を行う加工ロボットシステムにおいて、過負荷を防止するとともに加工の品質及び信頼性を向上させる。
【解決手段】加工ロボットシステム102は、ロボット手先部16に支持された加工工具92に加わる力及びモーメントを検出する力覚センサ90と、所定の制御パラメータに従ってロボット14及び流体圧シリンダ装置22を制御するシステム制御装置100とを備える。システム制御装置は、力覚センサの検出データに基づいて、倣い作業中に加工工具とワークとの間に作用している作用力を算出し、作用力に応じて手先部の目標軌道、目標移動速度及び流体圧シリンダ装置の目標押圧力を調整する。また、流体圧シリンダ装置が変位させる物体に作用する重力及び慣性力が流体圧シリンダ装置に及ぼしているシリンダ影響力を算出し、シリンダ影響力を補償するように目標押圧力を調整する。
(もっと読む)
擦弦楽器演奏ロボット
【課題】目標値に対する追従性が向上し、音色が人間の演奏に近くなる擦弦楽器の自動演奏ロボットを提供する。
【解決手段】歪ゲージ930によって弓920の歪を計測する。演奏データ記憶部210には、楽曲演奏時に弓毛922が弦911を押す応力を指令する歪データが設定記憶されている。弓押込角算出部310は、前記歪データに追従するために必要な弓920の押し込み角の指令値を算出する。制御パラメータ設定部350は、楽曲演奏時に弓毛922と弦911と接触位置に応じて制御パラメータを更新設定する。
(もっと読む)
自動ねじ締め装置とその制御方法
【課題】特性の異なる螺合部品(雄ねじ、ボルト、ナット等)であっても、ばね等の交換や、段取り等なしに、被螺合部(雌ねじ穴、雄ねじ部材等)にねじ締めを正確かつ確実に行うことができる自動ねじ締め装置とその制御方法を提供する。
【解決手段】ロボットアーム先端5に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられ、所定の螺合部品1を把持し所定の軸心を中心に回転駆動する把持回転装置14と、力センサで検出した軸方向の外力が予め設定した押付力となるようにロボットアーム先端5を力制御する力制御装置16とを備える。
(もっと読む)
ワーク加工装置とその制御方法
【課題】鋳鉄等の硬い材質のワークを加工する場合に、衝撃的な加工反力が発生しても加工精度を維持しかつ工具の破損等を防止することができるワーク加工装置とその制御方法を提供する。
【解決手段】3次元的に移動可能なロボットハンド4に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられワーク1の外面を倣う倣い部材15を有する倣い治具14と、倣い治具に取り付けられワークを加工する加工工具16と、倣い治具のワーク外面に対する倣い治具押付力Fallを予想される加工反力Rの最大値よりも大きい値に力制御する加工制御装置20とを備える。倣い部材14でワーク1の外面を倣いながら倣い治具14をワークの外面に沿って移動し、加工工具16によりワーク1を加工する。
(もっと読む)
搬送ロボット
【課題】高価な力センサや複雑な信号処理を不要にしつつ、吸着部材を適切な力で対象物に確実に押し付けた状態で対象物を吸着把持できる搬送ロボットを提供する。
【解決手段】
支持体5が取り付けられ、支持体を移動させるように動作する動作機構7と、吸着部材3を対象物に押し付けるために、吸着部材と支持体のうち吸着部材を移動方向前方側にして、吸着部材を対象物に向けて移動させる押付移動を動作機構に行わせる動作制御部11と、押付移動により吸着部材が対象物に押し付けられることで、吸着部材が弾性的に支持体側へ押し戻された量が所定量に達したかを検知する押付検知部9とを備える。押付検知部が、吸着部材の押し戻された量が所定量となったことを検知した時に、動作制御部は、押付移動を停止させる。
(もっと読む)
ロボットの制御装置
【課題】ロボットの接触状態の判定を元に位置制御と力制御を使い分けロボットの位置や姿勢だけでなく力加減を非接触状態から接触状態まで連続的に制御、教示し、再生することができるロボットの制御装置を提供する。
【解決手段】先端にエンドエフェクタを取り付けたロボット101を教示装置108により誘導して接触を伴う作業を教示し、教示した作業を再生するロボットの制御装置において、作業の教示時に、エンドエフェクタまたは把持対象物103が作業対象物104に接触していない場合にはロボット101を位置制御にて誘導し、教示点の登録の際にロボット101の位置を記憶し、エンドエフェクタまたは把持対象物103が作業対象物104に接触している場合にはロボット101を力制御で誘導し、教示点の登録の際に力の大きさを記憶する。
(もっと読む)
組み立て作業ロボットの制御方法
【課題】探索動作中のワークの引っかかりを防止し、挿入位置の縁に凹凸部があってもワークを対象物上の挿入位置へ挿入することができる組み立て作業ロボットの制御方法を提供する。
【解決手段】ロボット1002が把持したワーク201を対象物202に押し当てた状態で対象物202上を移動させ、対象物202に設けられた挿入位置203を探索し、ワーク201を挿入位置203へ挿入する組み立て作業ロボットの制御方法において、
挿入位置203を探索する際に、探索進行方向のワーク端を持上げ、ワーク201を対象物202に対して予め設定された傾斜角306で傾斜させる。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路
【課題】ロボットアームが動作する環境に適応し、さらに、作業者が簡単で短時間にロボットの教示を行うことが可能なロボット制御を実現できる、ロボットアームの制御装置及び方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路を提供する。
【解決手段】ロボットアーム(5)の制御装置(70)であって、ロボットアームの動作に関する情報が記憶された動作情報データベース(17)と、人(4)の力を検出する力検出部(53)と、人の力に応じて、動作情報データベースの動作情報を補正する動作補正部(20)を備えている。
(もっと読む)
ロボット装置
【課題】ハンド部での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なうロボット装置を提供する。
【解決手段】アーム部20とハンド部30とアーム制御部200とを備えたマニュピレータ10において、ハンド部30は、掌部40と、指部50と、掌部40の押付力を検出するタクタイルセンサ42と、指部50の押付力を検出するタクタイルセンサ53と、指部50の掌部40に対する位置・姿勢を検出する力覚センサ51とを有し、アーム制御部200は、掌部40の押付力と、指部50の押付力と、指部50の掌部40に対する位置・姿勢とに基づいて、アーム部20の制御目標を設定する。これによりハンド部30における各種情報をフィードバックしてアーム部20の制御が行なわれ、ハンド部30での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なえる。
(もっと読む)
嵌合の詰まり状態を修正する嵌合装置
【課題】嵌合ワークの姿勢を被嵌合ワークに嵌合可能になるように短時間で適切に修正する。
【解決手段】ロボットにより把持される嵌合ワーク(60)を、力制御によって被嵌合ワーク(50)に嵌合する嵌合装置(10)は、嵌合ワークの制御点に働く力とモーメントとを検出する力検出手段(3)と、嵌合時に、嵌合ワークと被嵌合ワークとの間に詰まりが生じているか否かを判定する判定手段(12)と、判定手段により詰まりが生じていると判定された場合には、嵌合ワークが被嵌合ワークに進入した距離に応じて制御点の位置を変更して、嵌合方向に対して垂直な方向において嵌合ワークを被嵌合ワークに押付け、それにより、変更後の前記制御点に基づいて前記嵌合ワークの姿勢を修正する変更手段(13)とを具備する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】嵌合などの接触作業に関して、教示時および再生動作時にワークおよびロボットに過大な力を発生させず、また再生動作時にタクトタイムが増加することなく、教示者が直感的な操作で簡単かつ短時間に教示再生を行うことができる装置および方法を提供する。
【解決手段】部品110aの嵌合挿入作業を行う動作プログラムの教示および再生を行うロボット101の教示再生装置であって、ロボット101の動作を制御する制御装置102と、可搬式教示操作盤103を備え、制御装置102は、力制御手段106と、動作プログラム記憶部108と、動作プログラム実行手段109と、教示データ記憶部115と、教示データ変換手段116を備え、可搬式教示操作盤103は、力制御設定手段111と、力制御手動操作手段112と、力制御状態表示手段113と、作業状態保存手段114を備える。
(もっと読む)
1 - 20 / 43
[ Back to top ]