
Fターム[3C007LV11]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423)
Fターム[3C007LV11]の下位に属するFターム
動作の開始又は進行に対する条件 (177)
プログラムの中断、再開 (23)
作業計画の決定 (79)
運転状態の切替 (114)
Fターム[3C007LV11]に分類される特許
21 - 30 / 30
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
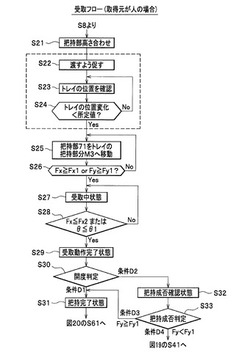
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
移動監視ロボット

【課題】 所定の巡回経路を走行する移動監視ロボットにおいて、巡回経路上の各場所を通過する時間を外部から予測困難とする。
【解決手段】 移動監視ロボット2は、移動経路を移動して警備情報を収集する。速度テーブル生成部83は、ランダムに移動速度を選択して、速度テーブルを生成する。移動制御部13は、速度テーブルに記憶された移動速度で移動するように移動手段11を制御する。さらに、停止位置候補である複数のマーカの各々で停止するか否かがランダムに選択され、停止位置の停止時間もランダムに選択される。
(もっと読む)
タスクスキルによる電源用3ピンプラグ挿入装置
【課題】
位置・姿勢誤差にロバストな特徴を有する電源用3ピンプラグ挿入作業を実施する人の器用さをロボットに実装するための電源用3ピンプラグ挿入作タスクスキルを実装する電源用3ピンプラグ挿入装置を実現する。
【解決手段】
電源用3ピンプラグ12を電源用3ピンコンセント13に挿入する作業をタスクスキルに基づいて記述するために、タスクスキルの動作手順を示し、ここの動作手順をタスクスキルのモデルである初期条件、タスクスキル動作、終了条件に基づいて記述した。また、タスクスキル動作にはインピーダンスと力のハイブリッド制御、またはインピーダンス制御を実装した。
(もっと読む)
無線タグによるロボットプログラム更新方法及びシステム
【課題】 簡単な操作で対象物に応じた適切なハンドリング用プログラムに更新できるロボットプログラム更新方法を提供する。
【解決手段】
ロボットプログラム更新方法は、ロボット制御装置11に設けた無線タグ読み取り装置13に対象物16に貼付した無線タグ15を接近させて読ませ、ロボット制御装置11の上で実行される処理により、無線タグ15から読み出した識別番号19に基づきデータベース14に問い合わせ、データベース14から対象物16に対応したハンドリング用のロボット制御プログラムのプログラムモジュールの提供を受けて、プログラムモジュールをダウンロードする。これにより、ロボットプログラムを更新する。
(もっと読む)
ロボット制御システム
【課題】 状態遷移表を使用することなく、ロボットの異常が発生した場合であっても要求されたサービスの実行を継続することができるロボット制御システムを提供する。
【解決手段】 本発明は、サービスフロー実行状態管理テーブルにサービス実行に必要なロボット保有能力、ロールバック定義及びサービス実行状態などを記憶し、ロボットに関するテーブルにロボットの保有能力、状態などを記憶し、サービス実行中のロボットに異常が発生して、当該ロボットがサービスの継続をできない場合に、上記テーブルに格納されたデータを参照することにより、状態遷移表を使用することなく要求されたサービスの実行を行なうものである。
(もっと読む)
ロボットコントローラ
【課題】 ロボットを複数同時に容易に動作させることができ、ロボットを制御するための負荷を小さくすることができるロボット制御システムを提供する。
【解決手段】 各ロボット21,22のロボットハンド130が移動する移動経路上の複数の移動位置をそれぞれ演算する単一のコントローラ24と、ロボット毎にそれぞれ設けられる逆変換処理部25、26とを有する。各逆変換処理部25,26は、対応するロボット21,22のロボットハンド130が移動経路上を移動するような各サーボモータの動作量を演算して求め、その動作量でロボット21,22の各ロボット21,2を制御する。協調制御する場合、コントローラ24は、他の装置と通信することなく、スレーブロボットの各通過点を演算することができる。またロボット毎に設けられる逆変換処理部25,26が、対応するロボット21,22に対するサーボモータの動作量の演算を分担する。
(もっと読む)
ロボット、ロボット行動計画実行装置、ロボットの行動計画実行方法、および、行動計画実行プログラム
【課題】
外部からの指示に応じて行動すると共に、外部からの指示と無関係な(予測不可能な)行動も行うことが可能なロボットの提供。
【解決手段】
行動計画生成部21は、指示・状態通知部16からの指示に基づいて、一あるいは複数の機能からなる指示ベース行動計画を生成する。追加行動選択部25は、前記指示ベース行動計画に含まれる機能を除いた別の機能を選択し、非指示ベース行動計画とする。
そして、機能実行指示部26は、指示ベース行動計画と、非指示ベース行動計画に基づき各機能を並列的に実行指示する。
(もっと読む)
物品供給装置
【課題】 複数種、多数の物品を搬入しても物品に振動により悪影響を与えることなく物品を分散し、視覚センサ−ロボットシステムで検出、取出しが行える物品供給装置。
【解決手段】 物品分散装置1の駆動モータ3で回転テーブル4が回転され、物品収容空間内に搬入された物品Wa 、Wb が少しずつ仕切り・くぐり抜け部材6の下縁7と載置面5の間の空隙9から、視覚センサのヘッド40の視野内に逃れ出る。視覚センサは物品Wa 、Wbの位置、姿勢、品種を検出し、補正された取出し動作で物品を把持し、供給先へ移送する。検出失敗時等には、状況に応じて教示プログラムが選択実行し、再度、物品の検出、取出し動作を実行する。回転テーブルの駆動にロボットを利用することや、回転テーブルに代えて直線運動テーブルを用いることもできる。
(もっと読む)
制御装置及びコンピュータプログラム
【課題】 1つ以上の工業用ロボットを含む複数の制御対象機器を統括的に制御するシステムを構築可能とする制御装置を提供する。
【解決手段】 制御装置にマルチタスクOSを搭載すると共に、そのOS上で動作するシステムタスク群を予め搭載しておき、そのシステムタスク群を介してユーザプログラムである動作タスク群,設備管理タスク群を動作させることで、コンベア,ロボット,加工機どを統括的に制御する。そして、システムタスク群の一部をなす優先順位切換えタスクは、設備管理タスク群にハードウエアを割り当てて処理を実行させるための優先順位を、動作タスク群についての優先順位設定可能領域よりも上位に設定する第1期間と、前記領域よりも低く設定する第2期間とに周期的に切換える。
(もっと読む)
スポット溶接用ロボットシステム
【課題】多関節汎用ロボットなどを利用して、高精度、高品質のスポット溶接の自動化を図る。
【解決手段】多関節汎用ロボット1などに取り付けられ且つスポット溶接用チップ11,13の開閉駆動源として電動式サーボモーター14を備えたスポット溶接用ガンユニット9と、ロボット制御装置17、溶接電流制御部29、及び主制御装置19を備え、この主制御装置19は、前記モーター14を制御するチップ駆動プログラム28と溶接電流制御部29を制御する溶接電流制御プログラム27、及びこれら両プログラム27,28に対して時間情報を与える両プログラム共通の1つのタイマー25を備え、スポット溶接用チップ11,13の開閉駆動とその間の溶接電流の制御とが共通の時間軸上で両プログラム27,28に従って実行される構成。
(もっと読む)
21 - 30 / 30
[ Back to top ]