
Fターム[3C007LV13]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423) | プログラムの中断、再開 (23)
Fターム[3C007LV13]に分類される特許
1 - 20 / 23
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
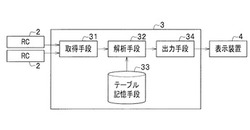
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
コミュニケーションロボット

【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
ロボット制御装置及びロボット制御方法
【課題】主電源が停電した後に復旧した際に、簡便な制御で、ロボット本体が迅速に作業を再開できるようにする。
【解決手段】演算器は、ロボット本体の一連の作業を予め複数の作業区分に分割し、主電源の電力供給によって、順次、ロボット本体に作業区分毎に作業を実行させる(S21〜S25)。演算器は、主電源が停電したときに、補助電源の電力供給によって、複数の作業区分のうち、主電源が停電した時点での作業区分の作業を終えるまでロボット本体に作業を継続させる(S27)。演算器は、主電源が停電した時点での作業区分の作業を終えたときに、主電源の停電が復旧するまでロボット本体による作業を停止させる(S28)。演算器は、主電源の停電が復旧したとき、ステップS27の処理にてロボット本体に行わせた作業区分の次の作業区分からロボット本体に作業を再開させる(S30,S31,S22)。
(もっと読む)
作業システム、作業ロボット制御装置および作業プログラム
【課題】各トレイ上の部品の位置等が変更されても、効率的にその部品を認識して作業動作を実行できる作業システムを提供することを目的とする。
【解決手段】この作業システムは、移動可能に配置された複数のトレイ4を、低空間分解能・広視野の画像上で認識した後、高空間分解能・狭視野の画像処理を行うことで、トレイ4に載置される部品3を特定し、トレイ4の配置位置を認識する。トレイ認識段階では低空間分解能であるため大量の画像処理を必要とせず、また部品認識段階では狭視野であるため大量の画像処理を必要としない。よって、当該トレイ4に載置される部品3の3次元位置・姿勢を効率的に認識できる。この2段階の画像認識によって、作業ロボット2による作業動作を効率的に行うことができる。
(もっと読む)
動作制御方法、インタラクティブデバイス及びプログラム
【課題】インタラクティブデバイス及びプログラムにおいて、人に違和感を与えないように、動作を切り替えたり動作を再開する。
【解決手段】任意の動作モジュール11−1〜Nが生成した動作シーケンスに所属する複数のコマンドを、複数の駆動部毎に、且つ、複数のコマンドの開始時刻順に受け付ける手順31と、各駆動部に対するコマンドキューが動作モジュールの単位で格納されたコマンドキュー格納部33−1〜Nから任意の動作モジュールに該当するコマンドキューのコマンドを取り出す手順と、各動作シーケンスを識別する情報と各動作シーケンスの開始時刻の対応付けを含むシーケンス情報36及び各動作モジュールと各動作モジュールの優先度の対応付けを含む動作調停情報32に基づいて取り出したコマンドを実行して該当する駆動部124−1〜Nを制御する手順34をコンピュータに実行させる。
(もっと読む)
自律移動装置
【課題】装置自体および周囲に対して高い安全性を有する自律移動装置を提供する。
【解決手段】自律移動装置は、移動手段を備える本体部120と、本体部に設けられ、脱力したときに先端が装置載置面に接触する、または、脱力したときに本体部に接触する長さを有する1または複数のアーム部130R,130Lと、装置を駆動する駆動機構を制御する制御部と、を備える。制御部は、装置が停止状態にされるとき、当該装置を停止状態とする前に、アーム部を本体部に設けられたアーム載置部126に移動して載置させた後脱力させる。
(もっと読む)
ロボット制御方法およびロボット制御システム
【課題】主として部品供給トレイなどに搭載された作業対象部品などの位置ずれに起因する「チョコ停」の未然防止を可能とするロボット制御方法およびロボット制御システムを提供する。
【解決手段】ロボット制御方法の一実施形態では、ロボットハンド31の1つ以上の作業対象部品が搭載された部品供給トレイ5が、所定位置に載置された状態で、作業対象部品のすべてが含まれるように撮像し、撮像された画像データから作業対象部品それぞれを検出するとともに、検出された作業対象部品それぞれの正常位置に対する位置誤差が許容範囲内か否かを判定する。位置誤差が許容範囲内と判定された作業対象部品に対しては通常作業を実行するが、位置誤差が許容範囲内ではないと判定された作業対象部品に対しては通常作業を実行しない。
(もっと読む)
力制御装置
【課題】動作中に力制限値とコンプライアンス制御パラメータを切替えることで作業を高速化しながら位置ずれ発生時に過大な力が作用するのを防止した力制御装置を提供する。
【解決手段】切替地点指定手段5からのロボットに行わせる作業動作に従ったロボット先端に作用する力の力制限値およびコンプライアンス制御の力制御パラメータの少なくとも一方を含むパラメータ条件、および上記パラメータ条件に切り替える切替地点を指示する命令に基づいて、パラメータ切替手段6が力制限値および力制御パラメータの少なくとも一方を切り替え、力制限超過判別手段4が力制限値を超える力が作用していると判別した場合に、ロボットに行わせる作業動作に従ってロボットの目標位置を示す位置指令を出力する指令生成手段1にロボットを減速停止させる位置指令を出力させる停止指令を入力する。
(もっと読む)
対話支援装置、対話支援方法およびプログラム
【課題】対話を支援する対象者に注意を向けていることを表示するときに、対象者の違和感を緩和できる対話支援装置、対話支援方法およびプログラムを提供する。
【解決手段】動作判定部14は、位置センサ12のデータから対話を支援する対象者の所定の動作を表す情報を取得する。カメラ13および雲台18は、カメラ13を対象者に向けることによって、対象者に注意を向けていることを対象者に向かって表示する。開閉表示部19は、カメラ13のレンズを閉じることによって、対象者に向けている注意を中断していることを表示する。コミュニケーション動作入力部11は、対象者のコミュニケーション動作を表す情報を入力する。注意表示切替制御部15は、対象者に注意を向けている表示と、対象者に向けている注意を中断している表示とを、対象者の動作を表す情報および/または対象者のコミュニケーション動作を表す情報に応じて切り替える。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
弦楽器演奏ロボット、及びその制御方法
【課題】簡便に異常を検知することができる弦楽器演奏ロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏ロボットの制御方法は、演奏データにしたがって弦楽器を演奏する弦楽器演奏ロボットの制御方法であって、演奏データに基づいて弦を振動させ、弦の振動によって発生した音の音高を検出するステップS102と、演奏データに対応する音の音高と前記検出した音高との比較結果に応じて、異常を検知するステップS104と、を備えるものである。
(もっと読む)
ロボット制御装置、ロボット制御方法及びロボット搬送装置
【課題】ロボットハンドがワークに干渉することがなく、退避点(作業基準位置)に戻るまで短い時間で迅速に移動させることができ、さらにプログラムの管理が容易なロボット制御装置を提供する。
【解決手段】プログラムを複数の動作区間に分割すると共に、分割された各動作区間に対して迂回動作の種別を指定する退避点復帰管理手段13と、動作経路命令を実行する際に、動作区間が、後退移動区間であるときには、この動作経路命令を動作経路記憶手段11に記憶しておき、中断停止入力があった際に、動作区間が、後退移動区間であるときに、動作経路記憶手段11に記憶されている動作経路命令を逆順に実行した後、退避点に復帰させるロボットプログラム実行手段7とを有している。
(もっと読む)
アーム搭載移動ロボットとその制御方法
【課題】人や周りの物体との接触や衝突に対して安全性の高いロボットに係る技術を提供すること。
【解決手段】 回転移動及び直線移動が可能な移動ロボットの安全装置において、関節駆動用のアクチュエータからの出力軸でのトルクを検出するための軸トルク検出センサを各関節に組み込んだ多関節構造を有するアーム101と、前記各軸トルク検出センサからの出力の変化に基づいて前記アームが周囲と接触或いは衝突したかどうかを判定し、かつ該判定結果に基づいて各部の動作を制御する制御部105とを具備し、前記アームが周囲との接触・衝突検出装置としての機能を備えた。
(もっと読む)
巡回ロボット及び巡回ロボットの自律走行方法
【課題】自動的に経路を変更して自律走行する。
【解決手段】巡回ロボット1では、走行管理手段1dの指示により、経路生成手段1cが、現在地点から次の目標の指定地点までの巡回経路情報を生成し、自律走行制御手段1eが、巡回経路情報に基づく巡回経路を自律走行する。走行途中、通行不可の経路が検出されて停止したときは、走行管理手段1dは、停止した位置を現在地点とするとともに、通行不可の経路を走行可能経路から外して再度経路生成手段1cに巡回経路を再生成させる。そして、自律走行制御手段1eに指示し、変更された変更巡回経路を走行させる。目標の指定地点に到達したらここを現在地点として巡回経路作成と自律走行を行うことによって、指定地点を巡回する。
(もっと読む)
ロボット制御装置及びロボット制御方法
【課題】 生産システムの稼動状態を随時把握しながら、複数のワークに関連する作業を並行して効率良く1台のロボットに遂行させることができるようにする。
【解決手段】 ロボット制御装置10は、ロボットの作業環境の状態を実時間で示す状態情報16を収集する情報収集部18と、状態情報16に基づいて、複数のワークに対し実行段階にある作業プログラム12のうち、作業開始条件14を満たしている第1の実行可能プログラム12Aを選定するプログラム選定部20と、第1の実行可能プログラム12Aを実行処理する処理部22と、処理部22が第1の実行可能プログラム12Aの実行処理を完了したか否かを判断するプログラム完了判断部24とを備える。プログラム選定部20は、プログラム完了判断部24の判断状況に応じて、作業開始条件を満たしている第2の実行可能プログラム12Bを、状態情報16に基づき選定する。
(もっと読む)
コマンド実行装置、コマンド実行方法およびコマンド実行プログラム
【課題】中断したコマンドを、コマンドの実行状況に応じた適切な時点から再開することのできるコマンド実行装置を提供する。
【解決手段】コマンドを実行する実行手段と、コマンドの実行を中断する中断手段と、中断中コマンドの再開条件を作成する再開条件作成手段と、実行済内容を作成する実行済内容作成手段と、再開条件と実行済内容とを、中断中コマンドに対応付けて保持する中断状態保持手段と、中断中コマンドの実行を中断した時点から再開コマンドを取得した時点までの間に取得したコマンドおよび再開条件に基づいて、中断中コマンドを再開可能か否かを判断する再開可否判断手段と、再開可能であると判断した場合に、中断した時点から中断中コマンドの実行を再開する旨を実行手段に指示する再開手段とを備えた。
(もっと読む)
自動走行ロボットの持ち上がり感知装置
【課題】自動走行ロボットが使用者によって持ち上げられた場合、それに応答して駆動中のロボットを停止させることにより、使用者を保護する。
【解決手段】本発明は、掃除機のような自動走行ロボットに関するもので、より詳細には、自動走行ロボットの持ち上がりを感知するための装置に関するものである。このような本発明の装置は、自動走行ロボットの持ち上がり状態を感知するための感知部と、前記感知部の出力信号によって自動走行ロボットの駆動を停止させる制御部とを具備する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 手作業によるタイミング調整が不要で、各ロボットの動作を同時に行わせることができるロボット制御装置およびロボット制御方法を提供する。
【解決手段】 コントローラ23は、移動開始位置から同期動作位置まで、各ロボットハンド19をそれぞれ最短時間で移動させるときの第1移動時間をロボット毎に計算し、計算した各第1移動時間のうちで、最も長くなる第2移動時間を決定する。そして決定した第2移動時間で、各ロボットハンド19を移動開始位置から同期動作位置まで停止させずに移動させるロボット動作計画をロボット毎に生成する。これによって各ロボットのロボットハンドが、移動開始位置から同期動作位置まで、それぞれ停止することなく移動し、同時に同期動作位置に到達する。したがって手作業によるタイミング調整を不要として、コントローラ23が、同期動作位置に移動した状態で、各ロボットの動作を同時に行わせることができる。
(もっと読む)
サーボモータ制御装置
【課題】両モータの停止時相対回転位置のずれ量を短時間に補正することができるサーボモータ制御装置を提供する。
【解決手段】被加工物を動作制御する2個のサーボモータの駆動中に両モータへの電力の供給が突然遮断され両モータのブレーキ機構の制動差によって両モータの停止時の回転位置にずれが発生したときにこのずれを補正する手段を有するサーボモータ制御装置において、両モータへの電力の供給が再開されたときは両モータの停止時回転位置を検出する検出手段と、検出された両モータの停止時回転位置に基づいて両モータの停止時回転位置間の差である停止時相対回転位置を算出しこの停止時相対回転位置と予め定められた初期設定相対回転位置とのずれ量を算出するずれ量算出手段と、ずれ量が零になるように両モータのいずれか一方又は両方を自動的に回転駆動させる補正駆動手段とを備えている。
(もっと読む)
サーボツール切離し/結合方法及びロボット制御装置
【課題】 サーボツールの切離し/結合に要する実質的な時間を短くして、ロボットの作業効率を向上させる。
【解決手段】 サーボツールの切離し位置への移動指令を出力(A1)。この移動の間、サーボツールのアンプへ停止指令の出力、動力線・信号線の断線エラーの無効化処理、サーボパラメータの無効化処理を開始する(A2)。電力供給停止を確認する(A3)。断線エラーの無効化処理、サーボパラメータの無効化処理の終了を確認する(A4)。ロボットが切離し位置に到達すると(A5)、サーボツールの機械的切離し処理を実行する(A6)。サーボツールの結合時も、機械的結合後の次の移動中に結合に必要なソフトウェア処理を実行する。ロボット移動中にサーボツールの切離し/結合に必要なソフトウェア処理がなされるから、サーボツールの切離し/結合処理が短い時間で行われ、ロボットの作業効率を向上させる。
(もっと読む)
1 - 20 / 23
[ Back to top ]