
Fターム[3C007LV18]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | 重力、温度等の補償 (55)
Fターム[3C007LV18]に分類される特許
1 - 20 / 55
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
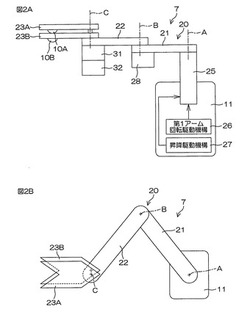
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
制御装置およびロボットアームの制御方法

【課題】本発明は、多関節型ロボットアームの滑らかな動作を実現することができる制御装置を提案する。
【解決手段】
本発明の制御装置2は、第一駆動モータ、第二駆動モータ、および第三駆動モータにかかる負荷イナーシャ、重力トルク、モータトルク、ならびにモータイナーシャに加えて、ばね装置のトルク、ならびに第一駆動モータ、第二駆動モータ、および第三駆動モータそれぞれの動力を伝達するための駆動系部材列のイナーシャである駆動系イナーシャのうちの少なくともいずれか一つを用いて、第一駆動モータ、前記第二駆動モータ、および第三駆動モータの角加速度を算出する加速度算出手段を備える。
(もっと読む)
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
加工ロボット及びその重力補償方法
【課題】重力補償の精度を高め、かつ、計測動作時において工具とワークとの衝突を避け、さらに、計測時間を短縮することを可能とした加工ロボット及びその重力補償方法を提供する。
【解決手段】外力を計測する力センサ15を備えた工具12を用い、加工中に工具12に作用する加工反力を計測しながらワーク1を加工する加工ロボット10の重力補償方法であって、加工軌道をCAMによって生成し、ワーク1の加工前に、加工軌道と干渉しない範囲で準備した計測軌道において、工具12を加工時の姿勢で動作させ、その際の力センサ15の計測値をオフセット値として記憶し、ワーク加工時に、加工軌道上の同一の姿勢におけるオフセット値を、加工中の力センサ15の計測値から差し引いて、加工反力を算出し、加工反力を用いて、工具12の押付力を制御しながらワーク1に倣って加工する。
(もっと読む)
ロボットアームの制御装置、制御方法、及び制御用プログラム
【課題】高価なセンサ等を用いることなく物体が挟まれた位置を正確に検出し、挟み位置に応じてトルクを最適に制御できるようにする。
【解決手段】関節角度の検出値θが目標値θrに追従するように生成される基本トルクT0に安全モータトルクプロフィールPsによる制限を適用することにより安全モータトルクTsを演算する。θに対するTsの変化に基づいてリンク機構21への物体の挟み込みを検出する。物体の挟み込みが検出された場合に関節部から物体までの挟み位置xを推定する。挟み位置xに応じてPsを設定する。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
ロボットの負荷推定装置及び負荷推定方法
【課題】オンラインで特定動作を必要とせず、ロボットが把持するワークの重量及び重心位置を推定する装置を提供する。
【解決手段】ワーク重量を想定せずにモータに向けて送られたトルク指令と把持されたワークの重量に応答して現実に生じているトルクとの差異に着目してワークの重量を推定する。ロボットに作用する重力トルク及び摩擦トルクを演算する手段(27)と、現実に生じているトルクから重力トルク及び摩擦トルクを減算することにより正味の外乱トルクを演算する手段(24)と、正味の外乱トルクをロボットの手先力及び手先モーメントに変換する手段(25)と、負荷が追加される前にロボットの手先に生じている第1の手先力推定値と、負荷が追加され微小量だけ持ち上げた後にロボットの手先に生じている第2の手先力推定値との差分を計算することにより負荷の重量を推定し、同様にして第1及び第2の手先モーメントの差分を計算することにより負荷の重心位置を推定する手段(26)とを備えている。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ロボットの制御装置
【課題】鉛直方向を検出することのできるロボットの制御装置を提供する。
【解決手段】ロボット10は、第4軸線J4の方向に延びるとともに、第4軸線J4を中心として回転可能に支持された第2上アーム16Bと、第4軸線J4に直交する第5軸線J5から離れる方向へ延びるとともに、第2上アーム16Bにより第5軸線J5を中心として回転可能に支持された手首部17とを備える。第4軸線J4を中心として第2上アーム16Bを重力により自由回転させ、且つ第5軸線J5を中心として手首部17を重力により自由回転させた場合に、手首部17の先端が指す方向を鉛直方向として検出する。
(もっと読む)
加工ロボットとその重力補償方法
【課題】工具をワークに押付けながらワークを加工することができ、かつ加工中に工具の姿勢を変えても、力センサの直線性誤差、他軸感度誤差、及び回転工具の回転によるコリオリ力の影響を低減して高精度な加工制御ができる重力補償方法を提供する。
【解決手段】外力を計測する力センサを有しワークを加工する工具と、工具を3次元空間内で位置と姿勢を移動可能なロボットアームと、加工データを記憶しロボットアームを制御するロボット制御装置とを備える。ワークの加工前に、工具とワークとを接触させずに、工具を加工軌道に沿って加工時の送り速度及び姿勢で動作させ、その際の力センサの計測値をオフセット値として記憶する。次いで、ワークの加工時に、加工軌道上の同一の送り速度及び姿勢におけるオフセット値を、加工中の力センサの計測値から差し引いて、加工反力を算出し、この加工反力を用いて、工具の押付力を制御しながらワークに倣って加工する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】瞬時歩容発生手段が発生した瞬時目標運動では考慮されていない、各脚体の中間部の関節の屈曲動作に伴う慣性力の影響を補償して、動力学的な精度を高めるように該瞬時目標運動を補正する。
【解決手段】ロボット1の直立姿勢状態から、各脚体2の先端部近傍の所定の点と、脚体2の上体3との連結部近傍の所定の点とを結ぶ線分の長さが縮まるように各脚体2の中間部の関節16R,Lを屈曲させて、関節16R,Lを前記線分と交差する方向に突出させる歩容を生成するとき、上体3と各脚体2との連結部の位置を、瞬時目標運動で定まる該連結部の位置から脚体2の中間部の関節16R,Lの突出の向きとほぼ逆向きに変位させ、且つ、上体3の下端に対する上端の位置を、瞬時目標運動で定まる上体3の下端に対する上端の位置から脚体2の中間部の関節16R,Lの突出の向きとほぼ同じ向きに変位させるように瞬時目標運動を補正する。
(もっと読む)
ロボット装置
【課題】 低コストで信頼性が高く正確なロボット関節部におけるたわみ補正、力制御等ができるロボット装置を提供すること。
【解決手段】 基台側リンク1に備えた駆動モータ11を駆動制御する制御装置と、この駆動モータの動力を入力軸52、固定軸53、出力軸54の3要素を有する減速機5を介して先端側リンク2に伝達する関節部3を備え、この関節部3は、前記基台側リンク1に筐体が固定され、検出部で前記減速機5の入力軸52の角度情報を検出する第一エンコーダ12と、前記先端側リンク2に筐体21が固定され、検出部22で前記減速機5の入力軸52の角度情報を検出する第二エンコーダ23とを備え、前記制御装置は、前記第二エンコーダ23で検出した前記入力軸52の角度情報に基いて前記駆動モータ11を駆動制御するよう構成されている。
(もっと読む)
多自由度マニピュレータおよび多自由度マニピュレータの制御プログラム
【課題】マニピュレータ先端部に保持されるワークの質量の変動に影響されることなく、多自由度マニピュレータの滑らかで高精度な動作を実現する。
【解決手段】複数のリンク17a、リンク18a、可動アーム11bを、複数の第1関節モータ17、第2関節モータ18、第3関節モータ19によって駆動することにより、ワーク10を保持するマニピュレータ先端部11aの3次元空間での大きな自由度の動きを実現する多自由度マニピュレータ11において、マニピュレータ先端部11aの内部に流体タンク21を設け、ワーク10の質量の変動に応じて流体タンク21に貯留される流体20の量を変化させることで、ワーク10の質量の変動に影響されることなく、常に一定の負荷がマニピュレータ先端部11aに作用するようにした。
(もっと読む)
ロボット制御装置
【課題】摩擦補償を適切に行うことでロボットの実際の動作軌跡をより理論に近づける。
【解決手段】ロボット制御装置3は、モータ軸側ギアと出力軸側ギアとが停止しており且つ弾性変形量がゼロである状態から出力軸を目標駆動方向に駆動させる場合に、モータ軸側ギアに印加する目標駆動方向への摩擦補償用トルクを徐々に増加させ、弾性変形量が最大弾性変形量に到達した以後では弾性変形量が最大弾性変形量に到達した時点での摩擦補償用トルクを一定値として印加する。
(もっと読む)
ロボット制御装置
【課題】摩擦補償を適切に行うことでロボットの動作軌跡の精度を適切に高める。
【解決手段】ロボット制御装置3は、モータ軸側ギアと出力軸側ギアとが停止しており且つ弾性変形量がゼロである状態から出力軸を目標駆動方向に駆動させる場合に、モータ軸側ギアに印加する目標駆動方向への摩擦補償用トルクを徐々に増加させ、弾性変形量が最大弾性変形量に到達した以後では弾性変形量が最大弾性変形量に到達した時点での摩擦補償用トルクを一定値として印加する。
(もっと読む)
ロボットハンド及び移送ロボット
【課題】ハンド本体に対して移動可能な可動部としての可動フレーム、第2取付アーム、及び複数の第2クランパに作用する慣性力を相殺して、基板の実際のテンションの増大及び変動を十分に抑えること。
【解決手段】ハンド本体9の他端側に一対のカウンタウェイト33A,33Bがハンド長さ方向Lへ移動可能に設けられ、各第1滑車35A(35B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第1連結ワイヤ39A(39B)が支持され、各第2滑車41A(41B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第2連結ワイヤ45A(45B)が支持されていること。
(もっと読む)
ロボットの制御装置
【課題】ロボットの接触状態の判定を元に位置制御と力制御を使い分けロボットの位置や姿勢だけでなく力加減を非接触状態から接触状態まで連続的に制御、教示し、再生することができるロボットの制御装置を提供する。
【解決手段】先端にエンドエフェクタを取り付けたロボット101を教示装置108により誘導して接触を伴う作業を教示し、教示した作業を再生するロボットの制御装置において、作業の教示時に、エンドエフェクタまたは把持対象物103が作業対象物104に接触していない場合にはロボット101を位置制御にて誘導し、教示点の登録の際にロボット101の位置を記憶し、エンドエフェクタまたは把持対象物103が作業対象物104に接触している場合にはロボット101を力制御で誘導し、教示点の登録の際に力の大きさを記憶する。
(もっと読む)
ロボットシステムおよび制御方法
【課題】多関節ロボットが障害物等に衝突した際、ロボット及び障害物に与える機械的ダメージを最小限に抑えるロボットの停止方法を提供し、衝突検出後、再プレイバックした際、再衝突を回避できるようにする。
【解決手段】モータ3により駆動されるロボットアーム4と、前記ロボットアーム4が障害物に衝突することを検知する衝突検出装置6を備え、前記衝突検出装置6からの情報をもとに前記ロボットアーム4を制御するロボットシステムにおいて、前記衝突検出装置6からの前記情報をもとに複数の停止方法を判断する停止方法選択処理部15を備えたものである。
(もっと読む)
補助トルク発生装置および補助トルク制御方法
【課題】歩行ロボットの関節に発生させる補助トルクの最大値を歩行中の任意の時点で変化させること。
【解決手段】バネスイッチのシリンダ51内をスライドするスライド部52にバネの一端を連結し、シリンダ51内表面に窪み61を設けるとともにシリンダ51の中心軸68に垂直な断面でのスライド部52の断面積を変えることによって、バネをバネスイッチでロックする。スライド部52は、S極部62と、N極部63と、コイル64とを有し、コイル64が発生する磁界によりS極部62とN極部63をくっ付けたり離したりすることによってシリンダ51の中心軸68に垂直な断面でのスライド部52の断面積を変える。
(もっと読む)
1 - 20 / 55
[ Back to top ]