
Fターム[3C007LV19]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | 座標変換方式、座標演算方式 (102)
Fターム[3C007LV19]に分類される特許
1 - 20 / 102
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
アーク溶接ロボット制御装置

【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット制御システム
【課題】予め定められた座標系でジョグ送りする場合は複数のキーの組合せ操作が必要なため操作が煩雑になる。
【解決手段】ツールの移動方向を定める方向指示キー41Aを備え、指示された移動方向および手動操作座標系に基づき、ツールをジョグ送りするロボット制御システム10である。ジョグ送り操作時に、手動操作座標系を構成する座標軸のうち1つを選択する。次に座標軸の回転角度を設定する。そして、手動操作座標系を座標軸中心に回転させ、回転後の手動操作座標系に従ってツールをジョグ送りする。上記回転角度は、ジョグダイヤル42によって設定しても良い。また、方向指示キー41のいずれか1つを押下したまま、ジョグダイヤル42によってリアルタイムに座標系を回転させながらアナログ感覚でジョグ送りすることもできる。軸方向をいつでも変更可能とすることによりジョグ送り操作時の煩雑さを解消する。
(もっと読む)
ロボット装置
【課題】2つのリンクの長さが異なっても、迅速にスティフネス特性を示す楕円を求める。
【解決手段】記憶部4には、第1の剛性指令値U1を求める第1の演算式、第2の剛性指令値U2を求める第2の演算式及び第3の剛性指令値U3を求める第3の演算式が記憶されている。各演算式は、スティフネス楕円の短軸及び長軸のうちの一方の軸が、直交座標系のx軸に平行となる条件での連立方程式を各剛性指令値について解くことにより導き出したものである。減算部3は、第1の揺動角度の値θ1*から目標標傾斜角度の値φ*を減算した値を新たな第1の揺動角度値θ1*’としている。そして、演算部2は、各演算式に、各値を代入する際に、第1の揺動角度値θ1*’を代入して、スティフネス楕円の軸が目標標傾斜角度の値φ*傾いた各剛性指令値U1,U2,U3を求める。
(もっと読む)
力制御ロボットのキャリブレーション装置と方法
【課題】ロボットの設置精度が低い場合でも、その設置誤差を考慮して、必要なパラメータをキャリブレーションすることができる力制御ロボットのキャリブレーション装置と方法を提供する。
【解決手段】3次元動作するロボットアーム1の手先に力センサ3を介してツール4が取り付けられている。ロボット制御装置14によりロボットアーム1を複数の姿勢に動作させて力センサ3の計測値と、前記計測値を取得するときの力センサの姿勢データとを取得し(S1,S2)、演算装置16によりツール重量、重力方向ベクトル、ツール重心位置ベクトルを含む複数のパラメータを算出する(S3,S4)。
(もっと読む)
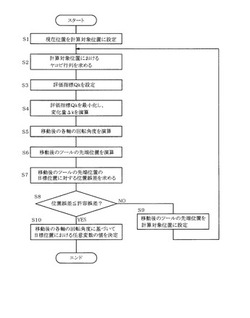
ロボットの角度データ変換方法及び装置
【課題】 冗長自由度ロボットに対しても角度データを変換可能で、ツール先端位置誤差の補正と関節角度リミット回避や障害物回避との両立を可能とする。
【解決手段】
幾何学的誤差を各々考慮した交換前ロボット及び交換後ロボットのツール先端位置ベクトルを計算し(S301-303)、これらベクトル間の誤差ベクトルを計算し(S304)と、幾何学的誤差を考慮した交換後ロボットの角度データに対するヤコビ行列を計算し(S307)、誤差ベクトルとヤコビ行列の逆行列または擬似逆行列とに基づいて角度補正ベクトルを計算し(S308)、関節角度リミット回避及び障害物回避を考慮した評価関数を使って角度補正ベクトルを修正し(S309)、修正した角度補正ベクトルで交換後ロボットの角度データを補正する(S310)、各工程を備え、誤差ベクトルの絶対値(S305)が閾値未満となる(S306肯定判定)まで、処理を繰り返す。
(もっと読む)
外力検出インタフェースの故障検知方法
【課題】エンドエフェクタを力覚センサで可動体に固定した外力検出インタフェースの力覚センサの故障を検出する方法を提供する。
【解決手段】剛性を有するエンドエフェクタ10が力覚センサ25、26によって可動体30に拘束され、エンドエフェクタ10に作用する外力が力覚センサ25、26の応答値から算出される外力検出インタフェースの力覚センサの故障検出方法であって、応答チャンネルの数が冗長性を有する力覚センサ25、26でエンドエフェクタ10を可動体30に拘束し、正常な力覚センサの応答値ベクトルが取り得る超平面に外力検出時の力覚センサ25、26の応答値ベクトルを拘束したときの超平面上の理論値と、当該応答値ベクトルとの偏差を求め、この偏差の大きさに基づいて、誤った応答値を応答する力覚センサのチャンネルを特定する。また、誤差を含むセンサ応答値から正しい外力を推定することもできる。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
マニピュレータの制御装置
【課題】ロボットアームと多指ハンドとを備えたマニピュレータの制御方法であって、アームとハンドの制御装置の独立性を保ちながら、アーム側はハンドの位置姿勢情報に基づくツール位置を制御することができ、ハンド側は作業空間における自身の位置姿勢を制御することを可能にする。
【解決手段】指令装置側に作業プログラムとは別に、周期的に動作する補助プログラムを設け、ロボットアームと多指ハンドの位置姿勢を座標変換してアームのツール位置姿勢とハンドの作業空間における位置姿勢を設定させる。これによって、作業プログラムは作業空間における多指ハンドの動作指令や、ハンドの作業点を作業空間における指定位置に動作させるようなロボットアームの動作指令をおこなう。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
ロボット制御装置、ロボットシステム、プログラムおよびロボットの制御方法
【課題】 ロボット本体の制御のみによってツールの位置および姿勢を制御する。
【解決手段】 先端部に複数のツールが固定された多関節ロボットの先端部のワールド座標系における現在位置および現在姿勢を示す第1の同次変換行列と、複数のツールのうち制御対象となっている対象ツールの先端部を原点とするローカル座標系における位置および姿勢を示す第2の同次変換行列との積を、第3の同次変換行列として算出するツール座標算出部と、第3の同次変換行列と、ワールド座標系における対象ツールが移動すべき目標位置および目標姿勢を示す第4の同次変換行列とに基づいて、ワールド座標系における対象ツールが移動する第1の軌道を算出するツール軌道算出部と、第1の軌道と、第2の同次変換行列の逆行列との積を、第2の軌道として算出するロボット軌道算出部と、第2の軌道に応じて多関節ロボットを制御する制御部と、を有する。
(もっと読む)
冗長ロボットの関節目標値決定方法及び冗長ロボットの制御装置
【課題】関節数がn、先端目標値ベクトルXの次数がm(n>m)である冗長ロボットの関節目標値ベクトルθを少ない計算負荷で決定する。
【解決手段】ベクトルXを複数の部分ベクトルに分割する。各部分ベクトルに優先度を付与する。各部分ベクトルとベクトルθの間の線形関係式を求める。一の優先度kを選択し、「選択された優先度kよりも高い優先度を有する全ての部分ベクトルが線形関係式と不等式関係式の拘束条件の下で実行可能である領域が存在するか否か」を判定する(S14、S15)。その処理を異なる優先度の部分ベクトルに対して実行し、上記領域が存在すると判定された部分ベクトルのうち最も低い優先度を有する部分ベクトルについて、上記拘束条件の下で目的関数C2を最小にする凸二次計画法の解を求める(S21)。求めた解をロボットベクトルθとして決定する(S22)。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
ロボットの制御装置
【課題】ロボットのリンクの振動を十分に抑制する。
【解決手段】複数のリンクと、対応するリンクを駆動する複数のモータとを有するロボットの制御装置であって、対応するモータの回転角度または回転角速度を検出する複数のセンサと、各リンクと対応するモータとの間のバネ要素それぞれについて、そのねじれ角度およびねじれ角速度を、複数のモータそれぞれへの制御入力と複数のセンサそれぞれが検出した回転角度または回転角速度とに基づいて推定する状態観測器と、状態観測器が推定した対応するバネ要素のねじれ角度およびねじれ角速度に基づいて、対応するバネ要素のねじれが解消するトルクをモータが出力するように、対応するモータの制御入力に加算するトルク補償量を算出する複数のトルク補償量算出手段と、トルク補償量算出手段が算出したトルク補償量を加算した制御入力を対応するモータに出力する複数のモータ制御手段とを有する。
(もっと読む)
7軸多関節ロボットの制御方法及び制御プログラム
【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
ハンドアイ式ビンピッキングロボットの制御装置
【課題】ロボットアームの手先部にハンドアイセンサを取り付けたビンピッキングロボットにおいて、ハンドアイセンサの存在を考慮した周辺との干渉防止を図ること。
【解決手段】ロボットのフランジ部9に取り付けたハンドアイセンサ11の干渉候補点の位置ベクトルRcp1,Rcp2を、ツール座標系揮毫Σtoolからロボット座標系Σbaseを介してステージ座標系Σsatageに座標変換する。そして、ステージ座標系Σsatageにおけるハンドアイセンサ11の干渉候補点の位置ベクトルRcp1,Rcp2のZ座標軸の値が正の値であれば、ハンドアイセンサ11がロボットの設置面A(ステージ)に干渉しないものと判断する。
(もっと読む)
ロボットシステム及びロボットシステムのキャリブレーション方法
【課題】キャリブレーションを容易且つ高精度に行なう。
【解決手段】キャリブレーション冶具5をハンド2bに固定し、ハンド2bを移動させて、キャリブレーション冶具5上の特徴点を所定の位置に移動させる。このときのカメラ座標系における特徴点の位置座標から、カメラ座標系における、キャリブレーション冶具5の座標系である冶具座標系の原点の位置及び姿勢を検出する。冶具座標系はハンド2bを基準とするアーム先端座標系と一致するため、カメラ座標系における特徴点と、アーム先端座標系との相対関係を検出することができ、すなわちキャリブレーション冶具5とハンド2bとの相対関係を検出することができる。このキャリブレーション冶具5とハンド2bとの相対関係を用いて、カメラ座標系とロボット座標系との剛体変換行列を求める。
(もっと読む)
マニピュレータの制御方法および制御装置
【課題】挙動の改善されたマニピュレータを提供すること。
【解決手段】本発明による多軸マニピュレータ、とりわけロボット(1)の制御方法は、1つの案内軸をコンプライアンス制御する段階(S50)と、別の軸を剛性制御する段階(S50)とを含み、上記の別の軸の目標値(q2s、q5s)が、案内軸の実際値(q3mess)に基づいて決定される。
(もっと読む)
移動マニピュレータの軌道生成システム
【課題】物品を定められた軌道に従って操作する際の移動台車の軌道及びマニピュレータ機構の軌道を同時に定める移動マニピュレータの軌道生成システムを提供する。
【解決手段】移動マニピュレータの軌道生成システムにおいては、移動台車の位置及び姿勢、並びにマニピュレータ機構の位置及び姿勢に関する初期値が設定される(ステップS01)。物品の軌道に従って把持機構の軌跡が算出される(ステップS02)。この把持機構の軌跡に設定される演算点毎に、移動台車の位置及び姿勢並びにマニピュレータ機構の位置及び姿勢が算出され、複数の解候補が定められる(ステップS03)。各演算点では、移動台車の位置及び姿勢のいずれか一方が制御される。評価関数を使用して移動ロボットの消費エネルギー等を最小にする最適な解が選定される(ステップS04)。
(もっと読む)
1 - 20 / 102
[ Back to top ]