
Fターム[3C007MS06]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375) | 危険領域(作動領域)内への異物進入検知 (24)
Fターム[3C007MS06]に分類される特許
1 - 20 / 24
ロボットシステム

【課題】ロボットの作業範囲内まで物品を搬送する搬送車を備えるロボットシステムにおいて、作業者の安全を確保するとともに、ロボットの作業性の低下を抑制する。
【解決手段】ロボットシステムは、ロボットアーム23により作業を行うロボット20と、ロボット20の作業範囲(危険領域A2)内まで組付け部品31を搬送する無人搬送車30とを備える。ロボットシステムは、水平方向に走査してレーザ光を照射し、物体により反射されて戻るレーザ光に基づいて、ロボット20から物体までの距離を検出する領域センサ40a〜40dと、領域センサ40a〜40dにより検出される距離が、危険領域A2の半径(L2/2)よりも短いことを条件として、ロボット20に安全動作を実行させるコントローラと、無人搬送車30に設けられ、領域センサ40a〜40dから無人搬送車30へ照射されたレーザ光を上方へ反射させる反射ベルト32とを備える。
(もっと読む)
ロボットの干渉回避装置および干渉回避プログラム

【課題】ロボット装置の干渉回避を優先順位を設けずに少ないメモリ量で実現する。
【解決手段】ブロック分割部31は、ロボット装置10−1,10−2の可動領域を分割して得られる各実空間ブロックの実空間ブロック座標値から、仮想空間における各仮想空間ブロックの仮想空間ブロック座標値を計算する。ブロック分割部31は、仮想空間ブロック座標値と、それを所定方向に所定距離だけオフセットさせて得られる所定数の仮想空間オフセットブロック座標値とのセットである仮想空間ブロック座標値セットをメモリ部33に記憶する。インターロック制御部32は、ロボット制御装置20−1,20−2から干渉回避制御要求情報を供給されると、その干渉回避制御要求情報と仮想空間ブロック座標値セットとに基づいて干渉回避制御を行い、ロボット制御装置20−1,20−2に対し進入許可情報またはエラー情報を送信する。
(もっと読む)
安全制御装置、ロボット、システム、プログラム、及び、記録媒体
【課題】安全制御手段を内蔵したロボットと併用することによって、該安全制御手段を2重化することができ、また、該ロボットと別個に使用することができる安全制御装置を実現する。
【解決手段】安全制御装置2は、センサにより検出された外界の状態に応じて内部状態を遷移させるか、または、安全制御手段11bにより発行されたコマンドに応じて内部状態を安全制御手段11bと同期させるFPGA基板21であって、内部状態を安全制御手段11bと同期させるときに、センサにより検出された外界の状態が予め設定された特定の条件を満たしているか否かを判定し、満たしていないと判定した場合にはサーボ機構12への電力供給を断つFPGA基板21を備えている。
(もっと読む)
侵入検知機能付き安全位置検出装置
【課題】作業員の侵入を検知するとともに、作業員の位置の検出することができる、きわめて構成が簡単な侵入検知機能付き安全位置検出装置を実現することを課題とする。
【解決手段】ロボットから所定距離離れた境界線に沿って配設されライトカーテンを構成する複数の侵入検知センサ用のマーカと、人に取り付けた人位置検出用センサ用のマーカと、前記侵入検知センサ用のマーカ及び人位置検出用センサ用のマーカからの光を受光する受光器とを備え、マーカからの光は、符号化された所定の符号パターンとなるように能動的にデジタル符号化し、送信信号として機能する光として投光される。
(もっと読む)
ロボット装置の制御装置及びロボット装置の制御方法
【課題】侵入物体の侵入を監視するように構成されたロボット装置において、マニピュレータの周囲の環境情報を迅速、かつ、容易に取得することができるようにする。
【解決手段】マニピュレータ1の可動領域を包括し該可動領域よりも広い領域であって侵入物体の侵入が可能である警戒領域に対する侵入物体の侵入を監視する侵入検知手段6と、マニピュレータ1の動作を制御する制御手段3,7とを備え、制御手段3,7は、警戒領域内のマニピュレータ1の周囲の環境データの取得を行うため、警戒領域内に侵入物体が存在しない状態において、マニピュレータ1を侵入検知手段6から観測される投影面積が最小となる姿勢とし、侵入検知手段6によりデータを取得し、取得されたデータから、マニピュレータ1を包含し侵入検知手段6を頂点とする錐体形状の領域のデータを削除して、環境データとする。
(もっと読む)
入退室管理装置
【課題】電気的な接続により複数の安全キーを連係させて設置エリア内の安全を確保する入退室管理装置において、同時に設置エリアで作業する作業者の人数の増減に対して柔軟に対応可能な安全システムを提供する。
【解決手段】入退室管理装置20は、安全キー22と、安全キー22が装着されるキー型セレクタスイッチ24と、キー型セレクタスイッチ24が備えた電気回路を終端接続する終端ユニット24cと、キー型セレクタスイッチ24に安全キー22が装着されたことにより電気回路が閉回路状態であることを検知した場合に、扉4のロックの解除制御を行う安全制御装置とを有して構成され、且つ、キー型セレクタスイッチ24は、基本ユニット24a及び単一または複数個の増設ユニット24bを多段に着脱可能に嵌合されて構成される。
(もっと読む)
ロボット装置の制御装置及びロボット装置の制御方法
【課題】マニピュレータを備えたロボット装置の制御装置において、マニピュレータと人との干渉、接触を確実に防止しつつ、装置のダウンタイムを減少させ、稼働効率が低下しないようにする。
【解決手段】マニピュレータ1の可動領域を包括し可動領域よりも広い領域であって侵入物体101の侵入が可能である警戒領域Bに対する侵入物体101の侵入を監視する侵入検知手段6と、マニピュレータ1の動作状態を特定するとともにマニピュレータ1の動作を制御する制御手段3,7とを備える。制御手段3,7は、検知手段6により、警戒領域B内への侵入物体101の侵入が検知された場合には、マニピュレータ1の動作を減速させ、マニピュレータ1の可動領域A内への侵入物体101の侵入が検知されるとともにマニピュレータ1と侵入物体101との距離が所定の距離以下となったときには、マニピュレータ1の動作を停止させる。
(もっと読む)
人間とロボットとの協調動作領域を有する生産システム
【課題】人間の安全を確保しながら、人間とロボットが同じ作業空間で同時に作業を行う協調動作を可能とする。
【解決手段】作業机6を挟んで一方の側にロボット2が配置され、反対側に作業員1が位置しており、作業員1の手が届く範囲は、作業机6のために制限されている。その結果、作業机6上は、作業員1のみが動作可能な人間動作領域3、ロボット2のみが動作可能なロボット動作領域4、およびそれらの間で作業員1とロボット2が共に動作可能な協調動作領域5に分かれている。ロボット2の制御手段は、協調動作領域内5では、ロボット2の構成部分の最高速度を協調動作領域5外におけるよりも低速に制限し、かつ、協調動作領域5内で作業机6や部材10などの周辺部材から所定の距離内のロボット進入禁止領域8にロボットの構成部分が進入しないようにロボット2の動作を制御する協調動作モードを有している。
(もっと読む)
給電調整装置を備えたロボットシステム
【課題】人間が状態信号スイッチ等を把持していない状態で、産業用ロボットが動作している領域内で該産業用ロボットと同時協調動作を行う場合に、制御装置の安全構造に依存せず人間へ危害が加わらないように構築されたロボットシステムを提供する。
【解決手段】給電調整器18は、少なくともロボット制御装置14への電流量を変化させる機能を持ち、人間20がロボット動作領域22に入ったことを検知したら直ちに、切替スイッチ等により制御装置14への電流量を調整する。
(もっと読む)
ロボットの安全監視装置
【課題】安全に作動させることができるロボットの安全監視装置の提供。
【解決手段】作動コントローラー2は、関節アームに含まれる各々のリンクおよび狭持片の目標位置を算出し、算出した目標位置に基づき、サーボモーター53a〜53f,54f,54gの作動を制御する。領域判定部10は、各狭持片ごとに、複数のリンクと狭持片が直列に接続された一対のリンク列を設定する。領域判定部10は、リンクおよび狭持片の現在位置に基づいて、リンク列ごとに関節アームの現在位置を算出し、算出したリンク列ごとの関節アームの現在位置が安全作動領域内にあるか否かを判定する。安全停止部11は、いずれかのリンク列について、関節アームの現在位置が安全作動領域外にあると判定された場合に、サーボモーター53a〜53f,54f,54gの作動を停止させる。
(もっと読む)
停止監視機能を備えたロボット制御装置
【課題】ロボット又は装置毎に動力供給を接続・遮断するためのハードウェア等を使用することなく、一方で作業者の安全を確保できる停止監視機能を備えたロボット制御装置を提供する。
【解決手段】CPU38は、各サーボモータからの位置情報に基づくロボット又は協働作業装置の位置と、侵入通知の状態とを周期的に監視し、侵入通知が最初に入力された時に、その侵入通知が割り付けられているロボット又は協働作業装置のサーボモータの位置をRAM40内に記憶する。その後、その侵入通知が入力されている間は、RAM40内に記憶された位置と、現在のサーボモータの位置との距離を計算し、その距離が許容移動距離よりも大きい場合には、非常停止手段28に指令を出し、ロボット14及び協働作業装置16の全てのサーボモータ18、20の動力を遮断する。
(もっと読む)
産業ロボットシステムにおける複数軸の制御方法および産業ロボットシステム
本発明は、ロード領域およびプロセス領域を含む作業セルと、人がロード領域に入ったときを検出する検出器(6)と、作業セル内に位置するマニピュレータと、工作物を保持するとともに、マニピュレータが工作物を加工する間に少なくとも1つの軸周りで工作物の方向を変化させるように構成されている少なくとも1つのポジショナと、1つの軸周りで可動であるとともに、コマンドを受け取ると、マニピュレータまたはポジショナをロード領域とプロセス領域との間で移動させるように構成されているステーション交換器とを備える産業ロボットシステムに関する。各軸にはモータ(M1−M3)と駆動ユニット(53−55)とが設けられる。軸コントローラ(50)は、ポジショナおよびステーション交換器の軸に停止を命令する第1のタスクと、ポジショナおよびステーション交換器の軸の動きを可能にする第2のタスクとの間で実行を切り換えるように構成されている。安全コントローラ(58)は、人がロード領域に入っていることを検出すると、ステーション交換器またはポジショナが動いているかどうかを監視するとともに、監視される軸のいずれかが動いていることが検出される場合、動いている軸の駆動ユニットを使用不能にする信号を生成するように構成されている。 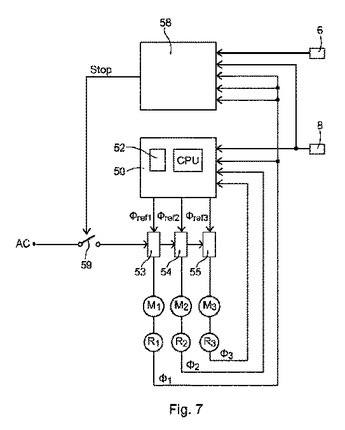 (もっと読む)
(もっと読む)
停止監視機能を備えたロボット制御装置
【課題】ロボット又は装置毎に動力供給を接続・遮断するためのハードウェア等を使用することなく、一方で作業者の安全を確保できる停止監視機能を備えたロボット制御装置を提供する。
【解決手段】CPU38は、各サーボモータからの位置情報に基づくロボット又は協働作業装置の位置と、侵入通知の状態とを周期的に監視し、侵入通知が最初に入力された時に、その侵入通知が割り付けられているロボット又は協働作業装置のサーボモータの位置をRAM40内に記憶する。その後、その侵入通知が入力されている間は、RAM40内に記憶された位置と、現在のサーボモータの位置との距離を計算し、その距離が許容移動距離よりも大きい場合には、非常停止手段28に指令を出し、ロボット14及び協働作業装置16の全てのサーボモータ18、20の動力を遮断する。
(もっと読む)
端子台装置
【課題】省配線化を図ると共に、産業用ロボットの駆動停止までの時間を短縮化する。
【解決手段】多光軸光電センサ13の安全信号入力に応じて産業用ロボット11を駆動制御するPLC回路15と端子接続すると共に、安全信号入力に応じて、産業用ロボットへの電力供給を遮断するセイフティリレー回路24を駆動制御する安全回路14と端子接続すべく、入力端子21A及び出力端子21Bを備えたセイフティターミナル16であって、入力端子及び出力端子を通じてPLC回路とのインタフェースを司り、入力端子を通じて安全信号を入力する制御回路用インタフェース23と、入力端子及び出力端子を通じて安全回路とのインタフェースを司り、入力端子を通じて安全信号を入力する安全回路用インタフェース22とを有し、制御回路用インタフェースは、入力端子を通じて安全信号を入力すると、出力端子を通じて同安全信号をPLC回路に通知するようにした。
(もっと読む)
機械の衝突防止のためのカメラを利用した監視方法及び装置
【課題】高速度で動く現代の産業ロボットにおいて、衝突は一般にロボット及び衝突する物体に深刻な損害を引き起こす。これはけがや費用のかかる生産停止につながりかねない。
【解決手段】可動式機械要素を備える機械とその周辺の物体との、衝突のない相互作用のための方法において、現在位置及び動的な挙動の知識を使用して、安全な領域を画定し、監視する。特に、可動式機械要素の画像データを画像取得システムによって記録し、データベースと相関させる。データベースは調整段階において、少なくとも一つの可動式機械要素の画像データを蓄積している。データベースは、機械の移動工程内の複数の移動段階に関する画像データを含んでいる。現在記録されている画像データをこのデータベースと相関させる目的で、可動式機械要素の現在位置が確認されるとともに、停止時間内に到達可能な将来位置が判断される。衝突の危険がある場合の機械の動的な挙動は、この判断に基づいて最適化される。
(もっと読む)
人間ロボット共存作業用安全装置
【課題】ロボットの構造にかかわらずセンサと安全コントローラによりロボットの可動範囲と作業者の侵入禁止領域を任意の領域に確実かつ簡便に設定し、またその可動範囲と侵入禁止領域を随時変更することを可能にし、ロボットと作業者が近接し、あるいは時間的に入れ替わりで作業するような環境でも、安全に効率的な作業を可能にする。
【解決手段】この人間ロボット共存作業用安全装置は、ロボットの侵入検知装置11、16と作業者の侵入検知装置12、17から成る侵入検知装置の組を一つ以上備え、侵入装置の組をロボットの可動範囲内で作業者が進入可能になっている開口部分を覆うように配置して成り、ロボットの侵入検知装置11、16と作業者の侵入検知装置12、17の間に挟まれた領域にロボットと作業者のどちらが侵入した場合でも不安全通知信号32を発し、この不安全通知信号32に基づいてロボットの動作を停止もしくは動作速度を制限し、作業者との衝突の危険を防止する。
(もっと読む)
ロボット制御装置
【課題】作業者が意図しなくても、非常停止回路の機能の点検が自動的に行われるようにする。
【解決手段】ロボット13を駆動する駆動モータ43に電力が供給されているときにロボット13の動作領域内に作業者が近づくことを禁止する自動運転モードと、駆動モータ43に電力が供給されているときでも動作領域内に作業者が近づくことを許容する第2の運転モードとを切り換えるための運転モード切換スイッチ31と、駆動モータ43への電力供給路49の遮断と接続とを切り換える電磁接触器51とを備え、電磁接触器51による電力供給路49の遮断によりロボット13を非常停止させることができるロボット制御装置に、さらに非常停止制御手段を設ける。非常停止制御手段は、運転モードの切り換えを検出すると、電磁接触器51に遮断指令を発し、電力供給路49が遮断されたか否かを自動的に確認する。
(もっと読む)
ロボット制御装置、ロボットシステム及びプログラム
【課題】作業者への負担を軽減する。
【解決手段】駆動手段20の駆動により動作領域aが形成されるロボット2の駆動制御を行うロボット制御装置3は、動作領域a内への進入者の識別情報を取得する取得手段63と、作業者Aの識別情報37aを入力する入力手段61と、入力された作業者Aの識別情報37aを記憶する記憶手段37と、取得した進入者の識別情報が記憶手段37に記憶された作業者Aの識別情報37aと一致するか否かを判断する判断手段64と、判断手段64が、進入者の識別情報が作業者Aの識別情報37aと一致すると判断した場合に駆動手段20の駆動速度を所定速度以下に減速する減速制御手段66と、判断手段64が、進入者の識別情報が作業者Aの識別情報37aと一致しないと判断した場合に駆動手段20の駆動を停止させる停止制御手段67と、を備える。
(もっと読む)
ロボットの制御装置
回転可能なアーム15と、アーム15を駆動するモータ11と、モータ11の回転位置を検出して位置検出信号を発生する位置検出器12と、アーム15の回転を規制するストッパー23と、モータ11の回転を拘束及び開放するブレーキ13と、モータ11を駆動するサーボ制御部33と、サーボ制御部33を無効にする共に、ブレーキ13を開放する解除操作スイッチ42と、解除操作スイッチ42の動作によりストッパー23とアーム15との角度に応じてブレーキ13を拘束又は開放の時間を変更するブレーキ制御部37と、を備えたものである。  (もっと読む)
(もっと読む)
作業ステーションの安全システム
【課題】生産性を向上させるに際し、作業ステーションエリアを増加しないで作業者の安全を確保することができる安全システムを提供する。
【解決手段】ロボット20の高速移動直前の監視エリア53を示し、監視エリア53を戻り方向Yへ拡張し、監視エリア53内の障害物の不在を確認する。高速移動中の監視エリア53を示し、監視エリア53内に障害物の不在を確認した後、戻り方向Yへ向けて高速移動を実施する。作業者の安全を確保してロボットの高速移動を実施することで、作業ステーションエリアの有効活用をすると共に、生産性の向上を図る。
(もっと読む)
1 - 20 / 24
[ Back to top ]