
Fターム[3C007WB04]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 歩行制御 (469) | 歩行パターンが予め決まっているもの (20)
Fターム[3C007WB04]に分類される特許
1 - 20 / 20
脚式ロボット、その制御方法、及び制御プログラム
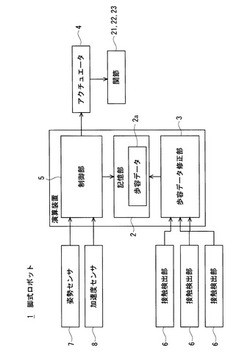
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
信号送受信装置

【課題】安価かつ簡易な構成で、安定した動作を可能とする歩行補助装置用の信号送受信装置を提供する。
【解決手段】本発明は、歩行補助装置を制御するために、信号を送受信する信号送受信装置であって、人体に接触可能な送信電極と、前記送信電極が前記人体に接触された場合に信号を送信する信号送信手段と、を有する送信部と、前記人体に接触可能な受信電極と、前記信号送信手段から送信された前記信号が前記受信電極を介して受信される信号受信手段と、を有する受信部と、を備え、前記送信電極と前記信号送信手段とは、所定距離以上離れていることを特徴とする。
(もっと読む)
三足歩行ロボット
【課題】従来の歩行ロボットは、姿勢制御を行うためのソフトウェアが複雑であり、またその問題を解決する目的で三本以上の脚部を搭載する歩行ロボットを用いる場合にはアクチュエータの数が増え、結果としてその多数のアクチュエータを制御する制御回路も複雑なものとなり、この部分の製作や整備に多大な労力が必要であった。
【解決手段】中央の脚部、または左右の脚部を用いて重心の左右の変化を抑えて歩行を行うようにする。さらに左右の脚部を連動させる事により脚部一本分のアクチュエータで二本の脚部を動作させる事で、一度に制御する必要のあるアクチュエータの数を二足歩行ロボットと同程度に減らす。
(もっと読む)
脚補助装具
【課題】ユーザに違和感を与えることなく立ち上がり動作や着座動作を補助することのできる脚補助装具を提供する。
【解決手段】脚補助装具は、リンク機構、アクチュエータ、角度センサを備えている。リンク機構は、大腿リンクと下腿リンクがジョイントによって揺動可能に連結されている構造を有している。大腿リンクと下腿リンクを夫々ユーザの大腿と下腿に固定すると、ジョイントがユーザの膝関節に隣接して位置する。アクチュエータはジョイントを駆動する。脚補助装具は、ジョイントを駆動することによって、大腿リンクと下腿リンクが揺動して脚の動作を補助する。角度センサは、ジョイントの角度を検出する。本発明の脚補助装具は、検出された初期ジョイント角から予め定められた最終目標角まで、等加速等減速の三角速度パターンでジョイントを駆動することを特徴とする。
(もっと読む)
脚式ロボットとその制御方法
【課題】路面起伏にリアルタイムに適応して円滑に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、離地位置と着地位置の間の路面起伏を計測する路面センサ、及び、脚の動作を制御するコントローラを備える。記憶装置は、歩行動作における足リンクの離地から着地までの遊脚軌道候補群を記憶している。複数の遊脚軌道候補は、相互にその軌道高さが異なっている。コントローラは、以下の計測ステップ、設定ステップ、選択ステップ、及び、制御ステップを実行する。計測ステップは、離地位置と着地位置の間の路面起伏を計測する。設定ステップは、計測された起伏表面に参照点を設定する。選択ステップは、参照点を通り脚式ロボットの進行方向と交差する鉛直面において参照点よりも高い位置でその鉛直面と交差する遊脚軌道候補を選択する。制御ステップは、選択された遊脚軌道候補に足リンクが追従するように脚を制御する。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【課題】スイング脚の着地点に置かれた障害物に対してロボットが転倒しないようにすること。
【解決手段】ロボットの歩行制御中に、足裏の力センサによりスイング脚の着地点に置かれた障害物を検出すると、反射制御部123dは、着地する脚の足裏に働く力の中心COPを計算し、COPが安定領域内にあるか否かを判定する。その結果、COPが安定領域内にない場合には、障害物に接触した脚の足首関節をピッチング動作させて安定領域を拡張することによって、ロボットの転倒を防ぐ。
(もっと読む)
歩行ロボット及びその制御方法
【課題】 2足歩行ロボットの歩行時、脚関節の剛性調節を通してエネルギー効率の高い歩行を具現し、上体の姿勢制御を通して2足歩行ロボットの全体的な歩行安定性を向上させる歩行ロボット及びその制御方法を提供する。
【解決手段】 上体に連結される複数の脚の歩行パターンを生成し、前記歩行パターンによって駆動される前記複数の脚の歩行状態に連動して前記複数の脚の剛性をそれぞれ調節し、前記上体の傾きを測定し、前記上体が重力方向と平行になるように前記上体の傾きを補償する。
(もっと読む)
脚式歩行ロボットの安定化制御装置
【課題】 前後方向と左右方向の安定化制御が互いに影響し合うことなく,足裏の小さいロボットでも前後左右からの外乱に対して高い安定性で動作することができる脚式歩行ロボットの安定化制御器を提供する。
【解決手段】 足平推力を関節モータトルクに変換する推力変換器と,エンコーダ情報から足平相対位置情報を算出する順キネマティクス演算器を備えることにより足平推力を操作可能とする。上体傾斜角,上体傾斜角速度,重心位置偏差,重心速度偏差の4つを状態変数とし,支持脚足平推力補正量を操作量とした状態方程式でロボットをモデル化する。前後方向,左右方向それぞれについて,この状態方程式を用いてレギュレータを構成し,計8つの状態変数全てを0に収束させる。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】軌道の追従性を良好に維持することで安定して歩行/走行動作を実現可能な脚式ロボット、及びその制御方法を提供する。
【解決手段】本発明にかかる脚式ロボットは、左足平位置姿勢と右足平位置姿勢と体幹位置姿勢を示すデータと、位置姿勢を実現する体幹位置を示すデータから、脚式ロボットをモデル化した「胴体と左膝位置と右膝位置と左足平近傍位置と右足平近傍位置に質量が集中して存在する力学系」を用いて、関節の目標トルクを計算する。また、データ群から、位置姿勢を実現するのに必要な各関節の目標回転量を計算する。計算された目標回転量と、検出される実回転量の偏差(62、64)とに基づいて、アクチュエータのモータに加える指令トルクを調整する。そして、計算された目標トルクを指令トルクに加算(66)する。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】距離センサの故障を検知して、安定して歩行が可能な脚式ロボット、及びその制御方法を提供する。
【解決手段】本発明に係る脚式ロボットは、胴体10と、脚部20と、足平部26と、足平部26の足裏と路面との距離を検出する距離検出部16と、歩容データに基づいて脚部20の関節を駆動制御する制御部30と、を備え、制御部30は、距離検出部16の検出結果が基準範囲内に含まれない場合に、距離検出部16の故障を検知する故障検知部66と、故障していない正常な距離検出部16の検出結果に基づいて、歩容データを修正する歩容データ修正部と、を備える
(もっと読む)
脚式ロボット、及びその制御方法
【課題】外乱に対しても、爪先関節を駆動させながら安定して歩行することができる脚式ロボット、及びその制御方法を提供する。
【解決手段】本発明に係る脚式ロボットは胴体10と、足平部26は、爪先部26aと爪先関節27を介して連結された踵部26bとから構成され、歩容データは、爪先部26aの目標位置姿勢と爪先関節27の目標角度とを含み、制御部30は、距離検出部16の検出結果に基づいて、爪先部26aの目標位置姿勢を補正する爪先部補正量と、爪先関節27の目標角度を補正する爪先関節補正量とを計算する爪先補正量計算部と、爪先補正量計算部により計算された爪先部補正量と爪先関節補正量とに基づいて、歩容データを修正する歩容データ修正部と、を備え、爪先補正量計算部は、踵部26bが離床している間、爪先関節補正量を所定の値に保持する。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】不整地においても、床反力モーメントを効果的に得つつ、足裏と路面との接触を保つことができる脚式ロボット、及びその制御方法を提供する。
【解決手段】脚式ロボットは、胴体10と、脚部20と、足部26と、胴体10の転倒方向を検出する転倒方向検出部と、制御部30と、足部26の足裏と路面との距離を検出する距離検出部と、を備え、距離検出部は、足裏に設けられた少なくとも3個の距離センサから構成され、制御部30が、距離センサを選択する距離センサ選択手段と、距離センサ選択手段により選択された距離センサの検出信号に基づいて、歩容データを修正する歩容データ修正手段と、を有し、距離センサ選択手段が、距離センサのうち、転倒方向検出部の検出結果に基づいて、3個の距離センサを選択する。
(もっと読む)
脚式移動作業装置
【課題】階段の昇降時などに作業機の姿勢の安定性を容易に確保することができる脚式移動作業装置を提供する。
【解決手段】脚式移動作業装置1は、作業機2を搭載した基体3の左右の両側部から3個ずつ前後方向に並んで延設された6個の脚体4fR,4fL,4mR,4mL,4rR,4rLを有する。各脚体4は、基体3側の端部が上下方向および左右方向の2軸まわりに回転可能で、中間部が左右方向の軸まわりに屈伸可能に構成される。各脚体4を動作させるアクチュエータ11,12,13が各脚体4毎に備えられる。階段の昇降時に、左右2個ずつの4個の脚体4を接地させた状態で、残りの2個の脚体4を遊脚として進行方向前方の段差面に着地させる運動の繰り返しによって、脚式移動作業装置1に階段を昇降させる。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】ロボットに対して外力が加えられた場合であっても、転倒せずに安定して歩行が可能な脚式ロボット、及びその制御方法を提供する。
【解決手段】脚式ロボットは、胴体と、胴体に連結された脚部と、脚部の下端に設けられた足部と、歩容データに基づいて脚部の関節を駆動制御する制御部30と、足部の足裏と路面との距離を検出する距離検出部と、を備え、制御部30が、距離検出部の検出結果が所定の閾値を越えるまでは当該検出結果の影響を受けずに歩容データ51に基づいて脚部の関節を駆動制御する不感帯と、距離検出部16の検出結果に基づいて、歩容データを修正する歩容データ修正手段と、を備える。
(もっと読む)
人型機械
【課題】マネキンや人形、ロボットなど人型機械に対し、人の情動を呼び起こす魅力的で美しい胴体の動作制御を行うこと。
【解決手段】胸部201と腰部202から成る胴体を持つマネキンやロボットなどの人型機械で、肩と腰が連動する美しい動きの表現方法と機構を持たせる。胸部201と腰部202が捻れる動きと同時に、胸部と腰部の左右体側の肩203・204と股関節205・206との距離が交互に開く揺動が同期して連動することで、胴体の美しい表現を可能にした。
(もっと読む)
ロボットとその制御方法
【課題】 脚式ロボットにおいて、自律的に動作の安定性を評価しながら目標とする姿勢を実現することが可能な技術を提供する。
【解決手段】 本発明のロボットは、体幹と、脚リンクと、アクチュエータ群と、コントローラを備える。そのコントローラは、足先歩容データを読込み、足先歩容データに基づいて安定領域と安定ZMP軌道を計算し、安定ZMP軌道を実現する安定重心運動を計算し、安定重心運動を実現する安定姿勢パターンを計算し、目標姿勢パターンを読込み、安定姿勢パターンから目標姿勢パターンへ移行する移行姿勢パターンを計算し、移行姿勢パターンを実現するときの移行重心運動を計算し、移行重心運動を実現するときの移行ZMP軌道を計算し、移行ZMP軌道が安定領域の内部に収まる場合にアクチュエータ群へ移行姿勢パターンを出力し、移行ZMP軌道が安定領域の内部に収まらない場合にアクチュエータ群へ安定姿勢パターンを出力する。
(もっと読む)
二足歩行ロボットおよびその制御方法
【課題】本発明は、事前に予測した右足と左足の軌道データに対して実際の動作における右足と左足の位置に誤差が生じた場合であっても、両足が干渉しない二足歩行ロボットおよびその制御方法を提供することを目的とする。
【解決手段】本発明は、軌道データをもとに予測して右足F1と左足F2とが最も接近する時における右足F1と左足F2の間の最接近予測距離δ0を算出し、右足F1と左足F2の少なくとも一方に配置されるセンサ(S11、S12、S21、S22)により、一方の足に配置されるセンサと他方の足の間の実測距離を計測し、実測距離から右足F1と左足F2の間の最接近距離δ1を算出し、最接近距離δ1が最接近予測距離δ0よりも小さい場合には軌道データを補正し、補正された軌道データに従い右足F1と左足F2を立脚と遊脚に交互に変更しながら歩行を行なうことを特徴とする。
(もっと読む)
ロボットシステム
【解決手段】ヒューマノイドロボット10は22個の関節を含み、22個の間接によって所定の動作を実行する。或る動作を実行したときにおける22個の間接についての関節角度指令値の時系列変化についての行列を特異値分解し、次元圧縮する。つまり、有効な特異値の数を減らす。これにより、ロボット10の制御情報が削減される。
【効果】次元圧縮するので、簡易なコントローラを用いてロボットの身体動作を簡単に制御することができる。
(もっと読む)
アニマトロニクス制御支持式歩行システム
1形態として、ロボット歩行形象物と、ロボット歩行形象物を少なくとも部分的に支持する車輪付き支持体からなる支持式歩行システムが開示されている。支持式歩行システムは、人間のオペレータによって駆動されそして制御される。上記歩行システムが、種々の速度で駆動しかつ回動する間に、前方へ、後方へ、そして側方へカートの運動と同期してステップを進めるように、コンピュータアルゴリズムがロボットの歩行機能を自動的に制御する。 (もっと読む)
バックラッシュ補償制御方法、バックラッシュ補償制御装置およびバックラッシュ補償制御プログラム
駆動源からの駆動力をバックラッシュを伴って伝達する駆動力伝達系を介して伝達されてきた駆動力を受けて周期的な動作を行なうロボットに、機械的な改造や付加を行なうことなしに、バックラッシュが補償された動作を行なわさせることを目的とし、ロボットの動作の一周期内における第1の期間中、所定の第1の動作制御値に補正値を繰返し累積加算することにより、その第1の期間をかけて漸次所定の第2の動作制御値に偏倚させるとともに、その一周期内における第2の期間中、上記の第2の動作制御値に補正値を繰返し累積減算することにより、その第2の期間をかけて漸次第1の動作制御値に戻すことにより、ロボットの動作を制御するための動作制御値を生成し、このようにして生成された動作制御値に基づいてロボットの動作を制御する。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]