
Fターム[3C007WC25]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | ロボット本体の構成の特徴 (330) | 頭、顔、首 (37)
Fターム[3C007WC25]に分類される特許
1 - 20 / 37
ロボット装置
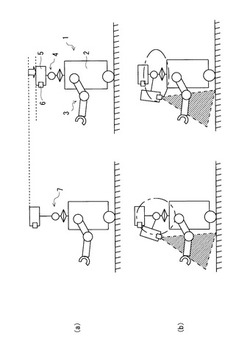
【課題】頭部の高さを低く抑えたままで広い認識可視領域を確保可能なロボット装置を提供すること。
【解決手段】ロボット1は、胴体2と、胴体2の上部に連結された首関節機構4と、首関節機構4により支持された頭部5と、頭部5の前面に配置された認識部6と、を備える。首関節機構4は、胴体2の上面に対する水平方向を長軸とし、胴体2の上面に対する垂直方向を短軸とする楕円形の軌道に沿って、頭部5を移動させることを特徴とする。
(もっと読む)
マイクロフォンシステム

【課題】音声認識に必要な振動数領域内の固体伝播音及び空気伝播音によるノイズを抑制することが可能なマイクロフォンシステムを提供する。
【解決手段】マイクロフォンシステムは、受音部21が前面側に設けられたマイクロフォン22、及びマイクロフォン22の後面側に取り付けられたウェイト23を有するマイクロフォンユニット20と、音穴11と連通する開口31を有し、マイクロフォンユニット20の前面側と頭部筐体10とにそれぞれ密着して配置される第1柔軟部材30と、頭部筐体10に固定されたケーシング40と、ケーシング40に保持され、マイクロフォンユニット20の後面側に密着して配置される第2柔軟部材50とを備える。
(もっと読む)
形体順応型表示装置
【課題】人に触れる機会の多いロボットには、顔を付けることが、求められている。無表情な状態や、表情の微妙な動きのズレは、違和感を感じるという問題がある。このような問題点を解決すべく、人間型骨格に馴染み、人間の表情と同様の動きを表示出来る、形体順応型表示装置を提供する。
【解決手段】凹凸や曲面のある物体へ、表示装置を密着して貼り付け可能とするため、フレキシブル基板上の単位画素間に連結部、と空隙部、とを設けてなり、前記空隙部は、前記単位画素を囲む様に配置する。フレキシブル基板上の単位画素間に設けてなる前記連結部は、伸縮性を持たせたい方向に対して、斜めに配置する。
(もっと読む)
リンク機構
【課題】揺動部と非揺動部との間のクリアランスを大きくすることなく、従来よりも揺動部の可動角を更に大きくする。
【解決手段】リンク機構1はベース部材2と出力部材3とを備える。ベース部材2には、前側に第1リンク部材4が、後側に第2リンク部材5が夫々揺動自在に連結されている。出力部材3には、前側に第3リンク部材6が、後側に第4リンク部材7が夫々揺動自在に連結されている。第3リンク部材6の揺動端部は第1接続軸J5上で、第4リンク部材7の後側の揺動端部は第2接続軸J6上で、夫々第1リンク部材4に揺動自在に連結されている。第2リンク部材5の揺動端部は、第3接続軸J7上で第4リンク部材7に揺動自在に連結されている。
(もっと読む)
仰角方向の音源知覚可能な耳介装置
【構成】 耳介装置(10)は、縦長矩形の平板状基体(12)を含み、基体には、縦長矩形の凹部(14)が形成され、凹部の内側面に、最下段から最上段に向かうにつれて凹部の開口側へ段々にせり出すような、3段の段面(16a-16c)によって階段部(16)が形成される。最下段の段面(16a)の所定位置を観測点とし、そこにマイクロフォン(18)を設けた。
【効果】頭部伝達関数において実際の耳介と同様のピーク/ノッチパターンを確認した。したがって、仰角方向の音源定位が可能であり、そのような耳介装置は簡単な形状、構造である。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
頭部動作制御情報生成装置
【課題】ロボットと人間とのコミュニケーションをより円滑にできるよう、ロボットの頭部の動きを制御する頭部動作制御情報生成装置を提供する。
【解決手段】頭部動作生成装置86は、ヒューマノイド型ロボットの頭部の動きを、当該ロボットが発生する音声に同期して制御する制御情報を生成する装置であり、句ごとに付されている談話機能タグごとに、複数の頭部動作をどのような確率で実行するかを規定する確率モデル群100と、入力された句に付された注釈に基づいて、確率モデル群100の中から確率モデルを選択し、選択された確率モデルにしたがった確率で、入力された所定の単位の音声データに対応する頭部動作コマンドをロボットの制御部90に出力する頭部動作コマンド生成部104を含む。
(もっと読む)
ロボット
【課題】少ない自由度の首関節で、歩行時に頭部を下向ける必要なく、足元等左右周辺の床面状況を素早く視認可能なロボットを提供する。
【解決手段】ロボット100は、胴部10と、胴部10の上部と首関節20を介して連結される頭部30と、頭部30に搭載されて外界を撮像する撮像装置40とを備える。首関節20は、水平軸L1回りに回動する第1の回動部21と、垂直軸L2回りに回動する第2の回動部22とを備え、水平軸L1の上方に垂直軸L2が位置する。そして、頭部30が当該ロボット100の正面を向いた状態で撮像装置40の撮像方向が下向きに傾斜している。
(もっと読む)
ロボット
【課題】少ない自由度の首関節で、視野を基体に遮られることなく下方を視認可能なロボットを提供する。
【解決手段】ロボット100は、胴部10と、胴部10の上部と首関節20を介して連結される頭部30と、頭部30に搭載されて外界を撮像する撮像装置40とを備える。首関節20は、水平軸L1回りに回動する第1の回動部21と、頭部30が当該ロボット100の正面を向いた状態で垂直方向から前方に傾斜する回動軸L2回りに回動する第2の回動部22とを備える。そして、第1の回動部21の回動軸L1の上方に第2の回動部22の回動軸L2が位置する。
(もっと読む)
ロボット、及び収音装置
【課題】高いS/N比で収音することができるロボット、及び収音装置を提供すること。
【解決手段】本発明の一態様にかかる収音装置は、マイクユニットが、第1の仮想直線L1上に配列されたマイクからなる第1のチャネルCH1と、第2の仮想直線L2上に配列されたマイクからなる第2のチャネルCH2と、第3の仮想直線L3上に配列されたマイクからなる第3のチャネルCH3と、マイクユニットが取得する音の音源の方位に応じて、第1乃至第3のチャネルL1〜L3を使い分ける手段と、を備える。第1の仮想直線L1と第2の仮想直線L2とは、第1のチャネルCH1の1つのマイクの中心点で交差する。第2の仮想直線L2と第3の仮想直線L3とは、第2のチャネルCH2の1つのマイクの中心点で交差する。第3の仮想直線L3と第1の仮想直線L1とは、第3のチャネルCH3の1つのマイクの中心点で交差する。
(もっと読む)
顔表情表出ロボットの表情可変構造
【課題】簡単な構造で人間の顔表情を表出することができ、頭部全体の小型化、軽量化を実現できる他、眉や口等の模擬可動体又は模擬顔面の交換性を良好にし、また、メンテナンス性を向上させること。
【解決手段】顔表情表出ロボット10は、人間の顔面を模擬した模擬顔面12と、模擬顔面12の表面側に動作可能に取り付けられた眉体14と、眉体14を動作させて人間の顔表情を模擬表出する表情形成手段16とを備えている。模擬顔面14は、磁気を透過可能な材料及び厚みからなる。表情形成手段16は、眉体14に取り付けられた表側部材22と、模擬顔面14を挟んで表側部材22に相対配置された裏側部材24と、裏側部材24を移動させる移動機構16とを備えている。表側部材22及び裏側部材24は、何れか一方が磁石により構成され、何れか他方が磁石若しくは磁性体により構成されている。
(もっと読む)
ボール及びソケットジョイントを実装する人型ロボット
本発明は、3つの回転自由度を持つ球面ジョイント(10)によって連結された2つの要素(11、12;131、132;141、142)を備える人型ロボットに関する。このジョイントは、3つの自由度のいずれかでそれぞれ作動する3つのアクチュエータ(14、16、18)によって動かされる。本発明は特に、可能な限り人体構造に近づいた人型ロボットの製造において使用される。本発明によれば、第1及び第2のアクチュエータ(16、18)は並列に作動し、第3のアクチュエータ(14)は第1及び第2のアクチュエータ(16、18)と直列に作動する。  (もっと読む)
(もっと読む)
ロボット
【課題】
小型の人型ロボットにおいて、移動および作業を確実に行うために、外部情報を得るためにカメラを備えたものが有る。人型ロボットであると頭部や胸部等の高い位置にカメラを備える方が得られる情報が多くなるが、頭部に設けた場合、頭部を支持する首部の可動領域に依存しなければならない。また胸部にあっては視野が限られてしまう。
【解決手段】
ロボットの頭部の前面上部の曲面に沿って移動可能な台座を設け、台座に2台のカメラを搭載する。カメラは、ロボットの頭部の幅とほぼ等しい間隔で左右に離し、カメラ前端が頭部の前端に一致し、かつロボットの上端近くに位置するように配置する。
(もっと読む)
脚式移動ロボット
【課題】搭載するカメラ(撮像素子)に太陽光などの高輝度の光源が写り込まれるときも撮影対象を適切な輝度値で撮影するようにした脚式移動ロボットを提供する。
【解決手段】頭部16に、撮影対象を含む外界からの入射光の軸線82b上の位置と軸線外の位置16c1の間で移動自在なフィルタ(バイザ)16cを設けると共に、CCDカメラ(撮像素子)によって撮像された画像に高輝度の入射光によって撮像された高輝度撮像部位があるとき、フィルタ16cを軸線上の位置に移動させて高輝度撮像部位の輝度を低減する。
(もっと読む)
移動ロボットにおける排熱利用機構
【課題】移動ロボットの光学シールドへの水滴や塵の付着も問題を解決する。
【解決手段】 モータの制御回路や制御CPU等の熱源201からの発熱を利用した温風をファン502によりダクト501を介して吸い上げ、それをチューブ503からノズル504に導き、ノズル504から光学シールド125の全面に吹き出させる。この温風により、光学シールド125への水滴や塵の付着の問題が解決される。
(もっと読む)
移動ロボットにおける排熱利用機構
【課題】移動ロボットの外殻内側への結露を防止する。
【解決手段】上胴体部102の胸部分の吸気口121の背後には、外気を吸引するための外気吸気ファン202が配置されている。この外気吸気ファン202の機能によって、外気が上胴体部102の外殻内に吸引される。吸引された外気は、熱源201に導かれ、さらに熱源201から熱を奪い、温風となり、上胴体部102内に供給される。これにより、移動ロボットの内部の乾燥が行われる。
(もっと読む)
ロボット
【課題】
意匠の自由度が制限されず、より構造が簡略で、さらに首部のアクチュエータの負荷を軽減するロボットを得る。
【解決手段】
頭部1と胴体部2と頭部1と胴体部2とを接続する首リンク3を少なくとも有するロボットにおいて、首リンク3に隣接して、周囲物体距離計測手段を胴体部2の上部かつ頭部1と胴体部2との間に設け、周囲物体距離計測手段における距離走査範囲が水平面と平行に設けられていることを特徴とするロボット。
(もっと読む)
コミュニケーションロボット
【課題】人は違和感を覚えることなくコミュニケーションをすることができるロボットを提供する。
【解決手段】コミュニケーションロボット10は眼球部76R,76Lを含み、眼球部76R,76Lには眼カメラ46R,46Lが設けられる。眼カメラ46R,46Lから取得した画像中の人や特定の物などの物体位置が検出され、眼球部76R,76Lがその物体の方向に向くように変位される。したがって、コミュニケーションロボット10は、人と視線を合わせたり、あるいは物体方向を注視したりする格好となる。また、眼球部76R,76Lは、頭部42が動いているとき、頭部42が向こうとする方向に視線が向けられるなど頭部42の動きに関連して変位される。
(もっと読む)
人工耳を有するロボットヘッド
【課題】人工耳を有するロボットヘッドを提供すること。
【解決手段】ヘッドは、それぞれ耳介形状の構造体およびマイクロフォンを備える人工両耳を指示する。聴覚の位置測定手掛りを高めるために、ヘッドの少なくとも上側部分は音響的減衰表面をもたらす。
(もっと読む)
ロボット装置
【課題】 情報に基づいて顔表情を変化させて発話するロボット装置を提供する。
【解決手段】 内側に蛍光層51を形成した中空球体状のスクリーン筐体50を用意する。そして、その内部にメール等の情報を受信する携帯電話20と、受信情報に基づいて内側から口形状を楕円で描画する第1レーザー描画装置30と、左右の目形状を楕円で描画する第2レーザー描画装置40と、スピーカ装置26を備える。第1レーザー描画装置30と第2レーザー描画装置40は、携帯電話20の受信情報に応じてそれぞれの楕円形状を変化させる。即ち、ロボット装置の口形状と目形状を変化させる。又同時に、スピーカ装置26は携帯電話20の音声出力を増幅する。これにより、ロボット装置は顔表情を変化させて発話する。このレーザー描画はスクリーン筐体50裏面の蛍光層51によって蛍光発光する。よって、点灯室内でも外部より明瞭に視認される。
(もっと読む)
1 - 20 / 37
[ Back to top ]