
Fターム[3C007XG02]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116) | 走行機構を有するもの (8)
Fターム[3C007XG02]に分類される特許
1 - 8 / 8
移動装置
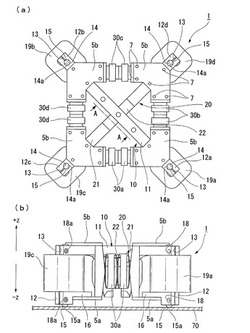
【課題】移動装置が走行面を移動する際に、脚部が傾倒するのを抑制し、良好な移動性能を確保することができる移動装置を提供する。
【解決手段】各駆動部材30a,30b,30c,30dの伸縮動作を第1フレーム10および第2フレーム20に作用させ、第1フレーム10と第2フレーム20とを相対移動させることにより走行面70を移動する移動装置1であって、板バネ部材として、コイル19a,19b,19c,19dと走行面70との間に第1板バネ部材5aが設けられていることを特徴とする。
(もっと読む)
移動機構

【課題】移動の負荷によって細毛が撓むことで細毛同士が干渉して理想的な付着条件を逸脱し付着力が低下することを防止でき、移動能力を保持することができる移動機構を提供すること。
【解決手段】移動機構の接触面の表面に、複数の細毛が、移動方向に対して第1の角度だけ傾いた第1の方向に第1のピッチで規則的に配列されているとともに、移動方向に対して第1の角度よりも大きな第2の角度だけ傾いた第2の方向に第2のピッチで規則的に配列された付着要素を備え、第1の角度をα、第1のピッチをp1、細毛の撓み方向に略垂直な方向の断面幅をdとした時に、(3式)を満足することで、移動の負荷によって細毛が撓むことで細毛同士が干渉して理想的な付着条件を逸脱し付着力が低下することを防止でき、移動能力を保持することができる移動機構を提供することができる。
(もっと読む)
管内走行マイクロロボット
【課題】良好な移動特性を備えながら機構が単純でアクチュエータの数を減らすことが可能な管内走行マイクロロボットを提供する。
【解決手段】先端の閉じられた膨張収縮自在な筒状体を隔壁で所定間隔ごとに分割してなり、各隔壁は、分割されている筒状体を時間差をもって順次膨張・収縮させるための液体流量制限穴を有している。
(もっと読む)
マニピュレータシステム、マニピュレータ制御プログラム及び吸入方法
【課題】確実、簡便かつ迅速に微小試料等の移し替え可能なマニピュレータシステム、マニピュレータ制御プログラム及び吸入方法を提供する。
【解決手段】試料テーブル7と、自動ピペット6と、XYZステージ51と、顕微鏡カメラ4と、PC3(パーソナルコンピュータ)と、を備えたマニピュレータシステムを構成する。PC3は、自動ピペット6を制御し、マイクロピペット61の中空部に細胞を吸入し及び吸入した細胞を吐出させる。さらに、XYZステージ51を制御し、マイクロピペット61を駆動する。このように、PC3は自動ピペット6及びXYZステージ51を制御し、シャーレ8中の細胞培養溶液と空気とを交互に吸入させることで、複数個の細胞を1つずつ分離した状態で連続的に吸入でき、1個ずつ分離した状態で吐出できる。このため、迅速かつ確実に細胞のマウント動作ができる。
(もっと読む)
マイクロロボット
【課題】 本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【解決手段】 駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする移動装置。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
移動装置及びその動作方法
【課題】簡易な構成であり、かつ、三つの自由度を持ち、さらに、電磁石の使用を回避できる移動装置を提供する。また、X−Y方向への移動におけるエネルギー効率が良く、制御も容易な移動装置を提供する。
【解決手段】例えばX方向への移動においては、第1圧電素子11を、比較的遅い速さで伸張させる。一方、第2圧電素子12を比較的遅い速さで収縮させる。これにより、ウエイト部3だけを、X方向に移動させることができる。ついで、第1圧電素子11を、比較的速い速さで収縮させる。同時に、第2圧電素子12を、比較的速い速さで伸張させる。これにより、ウエイト部3の慣性を利用して、支持部2を、X方向に移動させることができる。このようにして、移動装置をX方向に移動させることができる。
(もっと読む)
外側に可動部を持たない小型ロボット
【課題】 自律推進型で外側に可動部を持たない超小型化可能なカプセルロボットを提供する。
【解決手段】 カプセルロボット(1)は、筒状の本体(3)と、この本体の内部に該本体の進行方向と平行に移動自在に収納された可動体(4)と、本体(3)内において可動体(4)を前記本体の進行方向と反対の方向には高速で移動させ、前記本体の進行方向には低速で移動させる駆動手段(5)とを備える。可動体(4)の移動により運動量保存則及び静止摩擦に基づき本体(3)を進行させる。
(もっと読む)
1 - 8 / 8
[ Back to top ]