
Fターム[3C007XG04]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116) | アーム (10)
Fターム[3C007XG04]に分類される特許
1 - 10 / 10
試料作成装置および試料姿勢転換方法
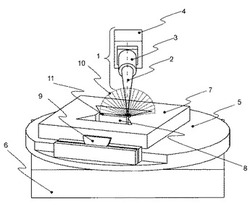
【課題】 簡便に試料小片の姿勢を90度、180度、あるいは任意の角度だけ回転させて試料台に固定可能な装置を提供すること。
【解決手段】 試料7の表面とマニピュレータ回転軸2の交点を一端とする試料表面に垂直な線分をマニピュレータ回転軸2の周りに回転して得られる円錐側面と、試料表面の2つの面によってつくられる交線11に、試料小片の特定の方向を一致させた後、試料小片をマニピュレータで支持し、マニピュレータ回転軸2を動作させることを特徴とする試料作成装置。
(もっと読む)
微小物体移動方法、微小物体移動システム、およびそれを用いた液体混合システム

【課題】ナノスケールやマイクロメートルオーダーの微小物体を非接触で運動制御する一手法として,光圧を用いることが知られている。しかし、従来では高NAの光学系を用いており、装置の小型化が進まず、例えば光マイクロチップのような微小構造体中に用いることが困難であった。
【解決手段】端面を半球状に研磨した光ファイバから放射させた、集光度が低い3本のビーム(レーザ光線)で正三角形状の循環経路を構成する。ビームの集光が緩やかである場合、照射対象に対してビームの放射方向とビーム断面内の中心方向に光圧が作用する。この性質を利用することでレーザビーム網に沿って、マイクロメートルオーダーの微小物体を循環運動させることができる。
(もっと読む)
細胞マニピュレータ
【課題】インジェクションピペットに対する微動動作とインジェクション動作を同一の手段で実施すること。
【解決手段】細胞に針を挿入するインジェクションピペット34と、インジェクションピペット34の位置を制御するXY軸テーブル36およびZ軸テーブル38を備え、インジェクションピペット34を支持するZ軸テーブル38に微動機構44を内蔵し、微動機構44は、印加電圧に応じてインジェクションピペット34の長手方向に沿って伸縮する圧電素子54と、圧電素子54に対する印加電圧を制御する制御回路を有し、圧電素子54は、微動用電圧の印加に応答してインジェクションピペット34をその長手方向に沿って微動駆動し、インジェクション用電圧の印加に応答してインジェクションピペット34に針を挿入するための押圧力を付与する。
(もっと読む)
試料を搬送するための搬送機構
【課題】 本発明は第1ホルダ(40)内の第1位置から第2ホルダ(10)内の第2位置へ、及び/又はその逆へ試料(2)を搬送する搬送機構に関する。
【解決手段】 各ホルダ(10,40)は脱着可能な状態で試料を保持するように備えられ、ホルダ間での試料の搬送は、第2位置とは異なる搬送位置で行われる。試料がホルダ(10,40)間を搬送されるとき、機械的案内機構は、第2位置での相互精度よりも高い相互精度でホルダを位置設定し、かつ試料が第2位置にあるときには、ホルダ(10,40)のうちの少なくとも1は位置設定されない。
機械的案内機構は追加部分(50)を有して良い。
ホルダ(40)のうちの少なくとも1は多数の試料を保持するように備えられて良い。
(もっと読む)
マイクロマニピュレータ
【課題】電子顕微鏡の真空中、電子線下で生物試料に微細操作を行えるようにする。
【解決手段】電子顕微鏡の真空の試料室内2で微小試料を掴んで微小な回動、移動、開放動作が可能なマニピュレータ10を備える。マニピュレータ10は並進3自由度型である。マニピュレータ10を光軸に対して位置合わせする位置調整機構5と、試料室内にあるマニピュレータの微小な針先合わせを電子顕微鏡モニタを観察しながら外部から操作する針先合わせ機構12と、電力供給用及び電気信号検出用のリード線を試料室の内から外へ気密性を保持して引き出すリード線引出し孔95とを備え、これらの位置調整機構,針先合わせ機構の操作部及びリード線引出し孔とが一つのフランジ71に集約的に配設され、このフランジが試料室の壁部の取付孔96に気密封止により取り付けられている。
(もっと読む)
駆動機構及び低侵襲外科手術用マニピュレータ
【課題】連結部に回転を入力して連結部を屈曲又は湾曲させることができる駆動機構を提供する。
【解決手段】鉗子1は、被連結部材23同士を連結する屈曲リンク21及び把持リンク22を備え、把持リンク22は、被連結部材23に対して軸方向に移動不可能に連結され、屈曲リンク21の第1軸11aには、被連結部材23の第2プレート17に螺合する第2雄ねじ14が設けられ、屈曲リンク21の第2軸11bには、被連結部材23の第1プレート16に螺合する第1雄ねじ12が設けられ、第1雄ねじ12及び第2雄ねじ14は、屈曲リンク21を一方向へ回転させたときに被連結部材23同士を近接させ、他方向へ回転させたときに被連結部材を離間させるように互いに逆方向に形成されるとともに、互いに同一ピッチに形成されている。
(もっと読む)
マイクロマニピュレータ
【課題】装置全体を複雑にすることなく微小物体を容易かつ適切に操作することができるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1は、細胞を載置するためのXYステージ42と、細胞を操作するための第1操作ユニット3と、第2操作ユニット4とを備えている。第1操作ユニット3は、細胞を操作するハンドリング部34と、ハンドリング部34をX、Y方向に移動させるXY駆動部31と、XY駆動部31に支持され、ハンドリング部34をZ方向に移動させるZ駆動部33とを有している。第2操作ユニット4は、細胞を操作するハンドリング部44と、XYステージ42をX、Y方向に移動させるXY駆動部41と、ハンドリング部44をZ方向に移動させるZ駆動部43とを有している。第1、第2操作ユニットでハンドリング部34、44に対する操作機能が異なる。
(もっと読む)
マイクロマニピュレータ
【課題】顕微鏡視野内において微小物体を正確かつ迅速に取り扱うことができ、消費電力の小さい小型のマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ100は、把持指の先端部を近接させて微小物体を把持するハンドリング部104と、パンタグラフ機構204を変位させハンドリング部104をX方向及びY方向に駆動するXY駆動部101と、パンタグラフ機構204を変位させハンドリング部104の把持指の先端部を中心として把持指が揺動するようにハンドリング部104の姿勢方向を変更するθz駆動部102と、ハンドリング部104をZ方向に駆動するZ駆動部103と、を備えており、XY駆動部101とθz駆動部102とは一体に構成されている。Z駆動部103はパンタグラフ機構204の出力リンク204jに支持されており、ハンドリング部104はZ駆動部103に支持されている。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
三次元位置決め装置
【課題】 プローブ、ピンセットあるいはシリンジなどの各種のマニプレータを簡単な操作で且つ高い自由度で位置決めすることのできる簡単な構成の三次元位置決め装置を提供すること。
【解決手段】 基台、この基台に第一の軸により支持され、第一の軸と共にあるいは第一の軸を中心にして独立に回転する第一の回転支持部、第一の回転支持部に、第一の軸に垂直な第二の軸により支持され、第二の軸と共にあるいは第二の軸を中心にして独立に回転する第二の回転支持部、そして第二の回転支持部に、第二の軸に垂直な第三の軸により支持され、第三の軸と共にあるいは第三の軸を中心にして独立に回転する、マニプレータ支持用の第三の回転支持部を含むマニプレータ三次元位置決め装置。
(もっと読む)
1 - 10 / 10
[ Back to top ]