
Fターム[3C034CA04]の内容
研削盤の構成部分、駆動、検出、制御 (11,657) | 検出対象 (2,276) | ワーク寸法 (610) | 加工前 (86)
Fターム[3C034CA04]に分類される特許
1 - 20 / 86
ベルト研磨装置
ワークの溝加工方法
ウエーハの位置補正方法
【課題】 簡単な方法でチャックテーブル上に搬入されたウエーハの中心とチャックテーブルの回転中心とを容易に一致させることのできるウエーハの位置補正方法を提供することである。
【解決手段】 ウエーハの位置補正方法であって、撮像ユニットによってチャックテーブルに保持されたウエーハの外周縁の少なくとも3箇所を検出してウエーハの中心座標を算出し、ウエーハの中心座標とチャックテーブルの回転中心の座標との間の距離(ずれ量)を算出する。次いで、ウエーハの中心とチャックテーブルの回転中心を結ぶ直線がスピンドルの軸心の投影と一致するように、チャックテーブルを加工送り方向へ移動させるとともに所定角度を回転する。そして、チャックテーブルの負圧を解除してから、切削ブレードの先端をウエーハの側面に当接させた状態で切削ブレードを割り出し送り方向にずれ量分だけ移動し、ウエーハの中心とチャックテーブルの回転中心を一致させる。
(もっと読む)
加工装置

【課題】チャックテーブルやウェーハの表面の高さを高精度で認識することを可能とする加工装置を提供する。
【解決手段】チャックテーブルと、チャックテーブルに保持された被加工物を加工する加工手段と、被加工物の表面を撮像する撮像手段と、Z軸方向に加工手段又は撮像手段を移動させチャックテーブルに向かって接近・離反させるZ軸移動手段と、Z軸移動手段の駆動を制御する制御手段と、を備えた加工装置において、Z軸移動手段は、加工手段又は撮像手段が固定された基台部と、基台部をZ軸方向に移動させる駆動部を備え、基台部には、下端部に配設される当接部と、Z軸の下降によってチャックテーブルの保持面又は保持面に保持された被加工物の表面に当接部が当接したことを電気信号で制御手段に出力する出力部と、を備えるタッチセンサーが搭載されていることを特徴とする加工装置とする。
(もっと読む)
偏芯ワークの偏芯部の高速自動芯出し方法、及びその装置
【課題】1つの偏芯部を有する偏芯ワークにおいて、研削盤の加工中心(スピンドル軸の軸芯)と前記偏芯部の中心とを正確に一致させる高速自動芯出し方法を提供する。
【解決手段】測定装置Dにより測定された偏芯ワークW1の偏芯部Bの中心位置C2と研削盤の加工中心C0との上下方向のずれ量をdとすると共に、前記偏芯部Bの中心C2と加工中心C0を一致させるために、前記偏芯ワークW1の軸部Aを回転させる位相回転角度をθとした場合に、(sinθ=d/e)が成立する位相回転角度θを演算するための演算装置を備え、ワーク回転装置は、偏芯ワークW1の軸部Aを把持するクランプ具がエンコーダ付のサーボモータで回転される構成であり、前記エンコーダにより割り出された前記位相回転角度θだけ、前記ワーク回転装置により偏芯ワークW1の軸部Aを一挙に回転させて芯出しを行う。
(もっと読む)
振れ精度測定方法および研削盤
【課題】振れ精度を研削中に測定できる振れ精度測定方法と、測定された振れ量に応じて触れ除去研削を実施できる研削盤を提供する。
【解決手段】工作物Wの研削中の1回転の間の、表面位置測定装置85で測定されるΘ=0の点Aの加工部の表面位置s0と、たわみt0を基準として、所定の回転角度Θiにおける変位変化Δsi=s0−siと、たわみの変化量であるたわみ変化Δti=t0−tiを用いて、回転角度Θiに対応する半径寸法変化を演算する。半径寸法変化に、工作物径測定装置83で測定される研削による工作物径の減少分(D0−D360)の、補正を加えて振れFiを演算し、Θ=0からΘ=360までの振れFiの値の最大差を加工部の振れ精度Fmとする。振れ精度Fmの大きさに基づき、振れ除去研削工程を実施する。
(もっと読む)
ダイシング装置及びダイシング方法
【課題】カッターセット機構、ブレード、ワークテーブルの相対的位置を非接触で容易に検知し、高い精度を保つことが可能なダイシング装置及びダイシング方法を提供すること。
【解決手段】測定手段18でスピンドル3とワークテーブル4との間の距離、スピンドル3と基準位置部材16との間の距離、またはスピンドル3とワークWとの間の距離を測定することにより、スピンドル3とワークテーブル4、スピンドル3とブレード2、スピンドル3とワークWとの相対的な位置を算出する。
(もっと読む)
工作機械
【課題】ワークの加工効率及び加工精度を向上させることができる工作機械を提供する。
【解決手段】加工装置30によるワーク23の被加工部25A,25Bの加工に先立って、計測装置27により被加工部25A,25Bを計測する。その計測結果を基準データとして設定するとともに、基準データをもとにして目標加工量を設定する。目標加工量に基づいて被加工部25A,25Bに対する第1加工量を設定する。設定された第1加工量が得られるように、加工装置30の動作を制御して被加工部25A,25Bに第1加工を施す。被加工部25A,25Bの加工済み部分を計測する。その計測結果に基づいて、目標加工量が得られるように加工済み部分に対する第2加工量を設定する。その第2加工量が得られるように、加工装置30の動作を制御して被加工部25A,25Bに第2加工を施す。
(もっと読む)
研磨装置及び研磨方法
【課題】生産性を低下することなく、研磨後の膜厚の目標値からのずれ量を小さくし、高精度な研磨を行う。
【解決手段】複数の基板Wにおける被処理膜の初期膜厚を測定する初期膜厚測定手段6と、初期膜厚の測定結果に基づき、各基板間の被処理膜の初期膜厚差が所定値以下となるように複数の基板を並べ替えるソート手段10と、並べ替えられた複数の基板の被処理膜を1次研磨する第1研磨手段14と、研磨後の被処理膜の膜厚を測定する研磨後膜厚測定手段15と、測定した初期膜厚と研磨後の被処理膜の膜厚、及びその時の研磨時間に基づき1次研磨における研磨レートを算出し、更に算出した研磨レートと次に1次研磨する基板の初期膜厚、及び研磨後の被処理膜の膜厚の目標値に基づき研磨時間を算出し、該研磨時間を次に1次研磨する基板の研磨時間としてフィードバックする制御を初期膜厚の厚さ順に逐次行う制御手段20と、を備える。
(もっと読む)
ワークの研削加工方法及び研削盤、それに用いる移動経路データの演算プログラム並びにその記憶媒体
【課題】砥石車の先端形状データとワークの加工形状データとに基づいて、傾斜角が3次元曲面的に変化するワークの被研削斜面に対する砥石車の移動経路データを求めてNCプログラムを容易に生成することができる研削盤を提供する。
【解決手段】CPU42に設けられた先端形状三次元座標データ変換部51によって砥石車の先端形状の三次元座標データを演算する。加工形状三次元座標データ変換部52によって、ワークの加工形状三次元座標データを演算する。両座標データに基づいて、移動経路データ演算部53によって傾斜角が3次元曲面的に変化するワークの被研削斜面に対する砥石車の移動経路データを演算する。この移動経路データに基づいて、NC指令データ演算部54によってNC指令データを生成する。
(もっと読む)
研削加工装置
【課題】ワークを研削装置の保持手段に搬入する前にワークの欠けの有無を検出する。
【解決手段】ワーク保持手段にワークを保持して研削加工を行う研削加工装置において、保持手段にワークを搬入する前にワークの欠けの有無を検出する検出手段4を備え、検出手段4は、被検出ワーク全体を撮像する撮像部41を備え、撮像部41を構成する画素が光の強度に応じて発する電気信号の強度に境界値を設け、境界値よりも強い強度を出力した画素又は弱い強度を出力した画素の少なくとも一方の数を検出数として検出し、その検出数と、あらかじめ欠けの無い基準ワークの撮像によって求められた境界値よりも強い強度を出力した画素又は弱い強度を出力した画素の少なくとも一方の数である基準数とを比較することによって欠けの有無を判定する。
(もっと読む)
偏芯ワークの位相出し方法およびその装置、ならびに、それらを用いた円筒研削盤へのワーク供給方法およびその装置
【課題】測定対象の面粗度や真円度が悪くても高精度に位相出しができる偏芯ワークの位相出し方法およびその装置、ならびに位相出し装置で決定した姿勢を保持したまま円筒研削盤に移し変え、そのままの姿勢を保ったまま円筒研削盤を動作させることができるワーク供給方法およびその装置を提供するものである。
【解決手段】回転部を備えたチャックで偏芯ワークを把持し、偏芯ワークを回転させながら回転角度に対応したワークの偏芯部の変位を非接触で測定し、測定した変位データを三角関数近似により偏芯部の位相ずれ量を計算するようにした偏芯ワークの位相出し方法およびその装置、ならびに研削加工前に位相出し装置により位相出しされた偏芯ワークを円筒研削盤に搬送する搬送装置がチャック部側と固定部側にバネ機構を介して切分けられ、偏芯ワークの姿勢を保持したままワークの受け渡しを行うようにしたワーク供給方法およびその装置が記載されている。
(もっと読む)
心出し装置および心出し方法ならびに心取り機および心取り方法
【課題】設備を大型化することなく、短時間で高精度な心出しを行うことができる心出し装置を提供すること。
【解決手段】レンズLを心出しする心出し装置1Aを構成するにあたり、レンズ保持具2と、レンズを回転させるときの回転中心線CLと直交する面内でレンズ保持具を変位させる面内方向移動機構(XYステージ4a)、および回転中心線と直交する面に対するレンズ保持具の傾きを調整する傾き調整機構(αβステージ4b)を有する位置調整部4Aと、先端に当該位置調整部が取り付けられたレンズ保持軸5と、回転中心線に対するレンズの偏心を一方のレンズ面La側から検出する偏心検出部6Aと、回転中心線に対するレンズの面振れを他方のレンズ面Lb側から検出する面振れ検出部7とを設ける。
(もっと読む)
タイヤ研磨装置
【課題】浮出しマークの表面形状が極端に変化したときであっても、削り込み精度を格段に向上させ、手直しが不要で生産能率を向上させることができ、また、砥石の細かな動きを可能にして研削精度を向上させることができるタイヤ研磨装置を提供することを課題とする。
【解決手段】タイヤを保持する上リムおよび下リムと、浮出しマークの表面形状を測定する表面形状測定手段と、表面形状測定手段による測定結果に基づいてタイヤ形状を変化させて浮出しマークの表面形状を調整するマーク位置修正手段とを備え、マーク位置修正手段は、上リムおよび下リムの間隔を調整するリム間距離調整機構と、上リムおよび下リムにより保持されてタイヤの内圧を調整する内圧調整機構とを備えていることを特徴とする。
(もっと読む)
切削装置における切削ブレードの消耗量管理方法
【課題】切削ブレードの正確な最下点端部位置でセットアップを行うことが可能な切削装置における切削ブレードの消耗量管理方法を提供する。
【解決手段】光学センサー50をX方向(水平方向)及びZ方向に移動してX方向の少なくとも異なる3点で該切削ブレード50の外周端部を検出する複数端部検出工程と、検出された複数の外周端部のX,Z座標から該切削ブレード50の回転中心座標(X0、Z0)55を算出する中心算出工程と、該切削ブレード50の回転中心座標(X0、Z0)と該切削ブレード50の複数の外周端部のうち少なくとも一つの外周端部のX,Z座標に基づいて、該切削ブレード50の半径を算出する半径算出工程と、該中心算出工程と該半径算出工程とを遂行して、前回割り出された該切削ブレード50の半径と比較し、該切削ブレード50の消耗量を算出する消耗量算出工程と、を具備したことを特徴とする。
(もっと読む)
切削装置における切削ブレードの消耗量管理方法
【課題】切削ブレードの正確な最下点端部位置でセットアップを行うことが可能な切削装置における切削ブレードの消耗量管理方法を提供する。
【解決手段】光学センサー65をX方向(水平方向)及びZ方向に移動してX方向の少なくとも異なる3点で切削ブレード50の外周端部を検出する複数端部検出工程と、検出された複数の外周端部のX,Z座標から該切削ブレード50の回転中心座標(X0、Z0)55を算出する中心算出工程と、回転中心座標(X0、Z0)のX座標と合致する位置X0に該光学センサーを位置付け、該切削ブレードをZ方向に移動させて、該切削ブレード50の最下点となる端部の位置を検出する最下点端部検出工程と、該中心算出工程と該最下点端部検出工程とを遂行して、前回割り出された該切削ブレード50の最下点端部の位置と比較し、該切削ブレード50の消耗量を算出する消耗量算出工程と、を具備したことを特徴とする。
(もっと読む)
眼鏡レンズ加工装置の較正用センサユニット
【課題】 加工具が導電性に依らず、較正を精度良く行うことができる、眼鏡レンズ加工装置を較正するめの較正用センサユニットを提供する。
【解決手段】 眼鏡レンズに代えてレンズチャック軸に取り付けられる固定部と、加工具に接触される接触部材と、固定部がレンズチャック軸に取りけられたときのレンズチャック軸方向である第1軸方向に対して直交する第2軸方向に接触部材を移動可能に支持する支持機構であって、第2軸方向で、且つ固定部に対して離れる側へ接触部材を付勢する付勢部材を持つ支持機構と、接触部材が前記加工具に接触したことを検知するために接触部材又は固定部に配置されたセンサであって、付勢部材に抗して固定部側へ微小距離だけ接触部ザが移動されたことを検知するセンサと、センサの検知信号を眼鏡レンズ加工装置の制御ユニットへ送信するための信号送信手段と、を備える。
(もっと読む)
化学機械研磨装置及びその運転方法
【課題】化学機械研磨における処理条件の安定化に寄与する化学機械研磨装置の運転方法を提供する。
【解決手段】化学機械研磨装置の運転方法は、回転するパッドに回転するウエハが接触してウエハが研磨され、研磨中にパッドの回転に伴いパッド周方向に関するウエハの位置が相対的に移動し、ウエハを保持して回転させるヘッドを有する化学機械研磨装置の運転方法であって、ヘッドの回転トルクに対応する物理量を、パッド上の周方向の複数の位置で測定する工程と、パッド上の複数の位置で測定されたヘッドの回転トルクに対応する物理量に基づき、パッド上の異常箇所を特定する工程とを有する。
(もっと読む)
半導体装置の製造方法及び製造システム
【課題】研磨後膜厚のばらつきを小さく抑えることが可能な半導体装置の製造方法を提供する。
【解決手段】半導体装置の製造方法では、研磨装置状態の変化による研磨レートの変化を研磨処理時の設備パラメータからモデル式を用いて予測し、被研磨膜の研磨時間を算出する。この際には、被研磨膜の研磨前膜厚を各ウェーハ毎に把握し、この膜厚差による研磨レートの変化分を補正して研磨時間を算出する。
(もっと読む)
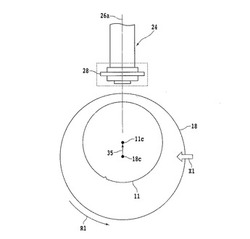
ワイヤードラムの異常検出装置
【課題】 ワイヤードラムへのワイヤー巻き付け状態の異常を検出する装置を提供する。
【解決手段】
ワイヤードラムのワイヤー巻き付け面に螺旋状のワイヤー溝が設けられ、該ワイヤー溝にワイヤーが導入され一層をなして巻き付けられ、導出されるようにしたワイヤー巻き付け装置と、前記ワイヤードラムの外円周面の近くで、ドラムの溝から露出するワイヤーの高さの範囲内で、ドラム回転軸線に平行な仮想直線上を進む光線を発射する投光器と、該光線を受ける受光器と、前記投光器と受光器とを取付けるセンサー取付部材を備える。
(もっと読む)
1 - 20 / 86
[ Back to top ]