
Fターム[3C042RB18]の内容
多工程加工の機械及びシステム (754) | 工作物の搬送手段(トランスファ) (249) | 制御、安全装置 (11)
Fターム[3C042RB18]に分類される特許
1 - 11 / 11
自動工作機械における複数パレットのセット搬送方法とセット搬送装置
【課題】段取りステーションとストッカの間において効率的にパレット搬送を行える。
【解決手段】セット搬送装置1は、ストッカ11に保管するワークWを搭載した複数のパレットPをマシニングセンター7に搬送して加工を行う。加工後にストッカ11に戻したワークWを段取りステーション9に搬送して次の加工のために別のパレットPに移載する。段取りステーション9への搬送に先立ち、ストッカ11内のワークWを搭載した複数のパレットPに対し、一次〜三次の加工段階の加工済みワークWを搭載した複数種類のパレットPの組合せ群を検出手段で抽出する。1組のパレットの組合わせを選択手段で選択して段取りステーション9に同時に搬送し、治具の異なるパレットP間で加工済みワークWを次の段階の加工のためにそれぞれ別のパレットPに移載する。加工完了したワークを次の処理工程に移し替え、未加工のワークを空のパレットPに移載する。
(もっと読む)
ロボットシステム

【課題】一連の作業を複数の作業ロボットに作業分割して実行するロボットシステムで、一部の作業ロボットの一部の作業区分に遅延が発生しても、他の作業ロボットに待ち時間が発生することなく生産性を向上させる。
【解決手段】アームロボット6a〜6dに設けられたロボットコントローラ4a〜4dには、n個の作業区分を割り振る。アームロボット6eに設けられたロボットコントローラ4eには、n個よりも少ないm個の作業区分を割り振る。いずれかのアームロボット6での作業区分の作業で遅延が生じたときは、遅延が生じたアームロボットよりも下流のアームロボットに設けられたロボットコントローラに、未実施となっている作業区分を割り振りし直す再割り振り処理を実行する。再割り振り処理を実行する際には、各ロボットコントローラに割り振られる作業区分の数の上限はn個である。
(もっと読む)
生産装置
【課題】装置の小型化を図ること。
【解決手段】生産装置1は、ロボット12と、ロボット12を側面から囲む外壁部112a〜112dとを備える。ロボット12は、たとえば、胴体部121の両肩部分にそれぞれ右アーム122aおよび左アーム122bを取り付けた、いわゆる双腕ロボットである。また、ロボット12は、外壁部112b近傍に、外壁部112dへ背面を向けて配置される。そして、外壁部112a〜112dは、ロボット12の可動範囲内に設けられる。
(もっと読む)
作業システム
【課題】作業システムの設備コストを抑えること。
【解決手段】作業システム1は、作業対象であるワークに対して所定の作業を行うロボット12と、ワークに対する所定の作業が行われる場所である複数の作業ステーション13a〜13dとを備える。そして、ロボット12は、作業ステーション13b,13cにおいてワークに対して圧入作業やネジ締め作業といった所定の作業を行うだけでなく、作業ステーション13a〜13d間でのワークの搬送も併せて行う。
(もっと読む)
生産設備および生産システム
【課題】生産ラインの構築および構成変更時のプログラム作成および修正の必要がなく、柔軟に切り離しおよび組み替えが可能な生産設備および生産システムを提供する。
【解決手段】生産設備1と生産設備1aの間でワークを授受する際に、ワーク搬送の協調に必要な情報およびワークに対する作業の動作制御に必要な情報を連携情報として生産設備1と生産設備1aとの間で授受する。作業制御手段4は他の生産設備1aから移動してきたワークに対する自生産設備1の作業を、同じく他の生産設備1aから取得した連携情報を用いて制御する。
(もっと読む)
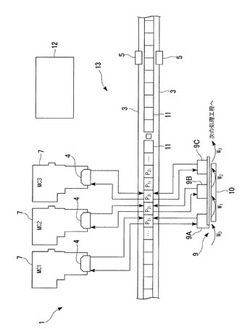
工程間フレキシブル自動搬送システム
【課題】レイアウト変更の自由度を高めつつ低コストで実施可能な、被加工対象物を自動搬送するのに適した工程間フレキシブル自動搬送システムを提供する。
【解決手段】複数のマシニングセンタ10に対応して配置されるワークステーションキット100と、これらを連結するレールキット200と、レールキット間又はレールキットとワークステーションキット間に配置されるターンキット300と、レールキット又はワークステーションキットの何れかに連結されるワーク投入キット410と、レールキット又はワークステーションキットの何れかであってワーク投入キットとは別のレールキット又はワークステーションキットに連結されるワーク排出キット420と、互いに連結されたこれらのキット上を移動可能な複数のワーク搬送車とを有し、レールキットは、ワークステーションキット、ターンキット、ワーク投入キット、ワーク排出キットと着脱自在である。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
自動生産装置
【課題】小型かつ低コストで、多品種に容易に対応可能な汎用性の高い自動生産装置を提供する。
【解決手段】ワークWに対して複数の作業を行う自動生産装置1は、架台2上に設置されてワークWの搬送及び複数の作業を行うロボット3と、ロボット3に交換可能に取付けられ、ワークWの搬送及び複数の作業の少なくとも1つに対応する形状に形成された複数の作業ハンド4と、基台11と、基台11上に設置されて複数の作業のうち少なくとも1つに使用される作業機構とを有し、架台2上かつロボット3の作業範囲内に交換可能に配置された複数の作業ユニット5A〜5Fと、架台2上に設けられ、作業ユニット5A〜5Fの配置位置を規定する位置決め手段6と、ロボット3及び複数の作業ユニット5A〜5Fと接続され、ワークWの搬送及び複数の作業を制御する制御部とを備えることを特徴とする。
(もっと読む)
ロボットライン設備
【課題】ロボットと作業者とが互いに補助し合って処理ライン上で作業を行うことができ、生産性を高めることが可能なロボットライン設備を提供する。
【解決手段】本発明では、処理ライン10Lにおけるステージ処理空間R3をそれらロボット専用領域R2側と作業者専用領域R1側との両方に開放したので、ロボット80と作業者とが互いに補助し合って処理ライン10L上で処理を行うことができる。また、システム制御盤79が、ロボット処理待ちのステージを選んでロボット処理を開始し、作業者処理待ちのステージを選んでそのステージ処理空間R3への作業者の進入を許可する。これにより、作業者、ロボット80、加圧アクチュエータ50等が、作業者及びロボットの待ち時間を減らして別々のステージで効率良く作業を行うことができ、生産性を高めることが可能になる。
(もっと読む)
工程管理機能を有する自動機
【課題】 工程管理情報を集計可能であって、それにより不良品の原因究明が可能な自動機を提供する。
【解決手段】 複数の品番の対象物を自動で処理する自動機は、対象物に複数の処理をそれぞれ施すための複数のセクションを具備する処理工程部と、複数のセクション間において対象物を搬送する搬送部と、処理工程部の入口より前に設けられていて開時に対象物の処理工程部への搬入を許容し、閉時に対象物の処理工程部への搬入を阻止するストッパと、ストッパの前に設けられていて対象物の種類又は品番IDを検知する品番検出器と、自動機を制御していて品番検出器の信号を受信してストッパを開閉する制御装置とを具備する。処理工程部は各セクションにおける処理結果等の工程管理情報を前記制御装置に送信する。制御装置は工程管理情報を収容して記憶する流動記憶部を具備する。
(もっと読む)
ワークピース用モジュラー移送システム
【課題】
【解決手段】本発明は、ワークピース用モジュラー移送システム1に関する。本発明の本質は、ワークピースキャリアー22乃至27が、製造モジュール6乃至9において、ワークピースキャリアーを移送するのと同じCNC(x−y)軸システム及びサーボ駆動装置13,14,15によって位置決めされることである。このため、移送ための独立したコンベアーベルトが必要ない。
(もっと読む)
1 - 11 / 11
[ Back to top ]