
Fターム[3C059CH11]の内容
放電加工、電解加工、複合加工 (4,787) | 制御対象(加工中の電極運動) (150) | 送り機構の誤差の補正 (13)
Fターム[3C059CH11]に分類される特許
1 - 13 / 13
位置決め精度補正機能を備えたワイヤ放電加工機
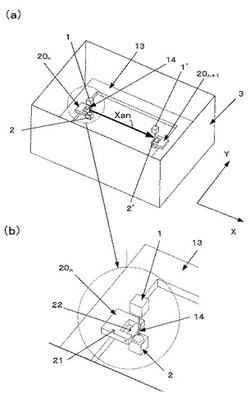
【課題】機械の設置状態や、加工液重量あるいはワーク重量などの影響で悪化する位置決め精度を向上させる機能を備えたワイヤ放電加工機を提供する。
【解決手段】加工槽3内のテーブル13に2つの接触検出用治具20を取り付け、接触検出用治具20とワイヤ電極14の接触位置の座標を測定・記憶し、接触検出用治具20間の距離を求める。次に、テーブル13上にワーク15をセットし、加工液16を加工槽3に実加工を行う状態と同じ液位まで溜め、同様に接触検出用治具20とワイヤ電極14の接触位置の座標を測定・記憶し、接触検出用治具20間の距離を求める。そして2つの距離の誤差から計算により補正量を求め、加工槽3内の加工液16の重量およびワーク15の重量による位置決め精度の変化を補正する。
(もっと読む)
ワイヤ放電加工機、ヘッド制御方法、及びそのプログラム

【課題】ワイヤ放電加工機の上下ヘッドの相対位置ずれを、簡易的な構成と処理で正確に補正を行う。
【解決手段】本体及び被加工物搭載用のX−Yテーブルが前面側から見て略左右対称に設計され、背面側から前面側に延出するコラムを有しており、コラムの先端部周辺に配設されたコラム前温度センサからの温度情報を入力する温度情報入力部41と、ヘッドの位置ずれが生じていないときの基準温度情報を記憶する基準温度記憶部46と、入力された温度情報及び基準温度情報の差分を演算する温度差演算部42と、コラムの材質における線膨張係数と、その延出部分の長さから得られる補正係数を記憶する補正係数記憶部45と、演算した温度変化及び補正係数に基づいて、上下ヘッドの相対的なずれ量を演算するずれ量演算部43と、演算されたずれ量に基づいて、前記ヘッド駆動軸を制御してV方向の位置ずれを補正するヘッド駆動軸補正部44とを備える。
(もっと読む)
放電加工装置
【課題】電極の送り方向に垂直な平面内で電極と被加工物とを相対的に揺動させながら被加工物を加工する際における加工速度を向上できる放電加工装置を得ること。
【解決手段】放電加工装置は、被加工物を加工する際に、電極揺動指令に従って、電極の送り方向に垂直な平面内で前記電極と前記被加工物とを相対的に揺動させる揺動手段と、基準揺動軌道からの実際の電極位置の差を算出する算出手段と、前記差が小さくなるように前記電極揺動指令を変更する変更手段とを備え、前記揺動手段は、前記変更手段により変更された前記電極揺動指令に従って、前記電極と前記被加工物とを相対的に揺動させる。
(もっと読む)
放電加工装置
【課題】工具電極の高精度な取り付けを必要とせずに高精度な放電加工を実現できる放電加工装置を提供すること。
【解決手段】放電加工装置は100、工具電極2が取り付けられる把持部を有し、工具電極2を並進3軸および回転3軸の全6軸で位置姿勢変更を可能なとする加工ヘッド1と、工具電極2の回転角毎の電極位置を検出する電極位置検出器3と、この電極位置検出器3により検出された、工具電極2の回転軸方向の複数個所における電極位置に基づいて工具電極2の位置誤差を算出する電極位置誤差計算装置4と、工具電極2の位置指令に対して回転角毎に位置誤差の補正をしつつ加工を行う制御装置5とを備えている。
(もっと読む)
形彫放電加工機及びジャンプ制御方法
【課題】1回目のジャンプ制御から減速開始位置の最適化を行える放電加工機及びジャンプ制御方法を得ること。
【解決手段】支持部材に交換可能に保持された電極13を移動させてワーク2との間隔を変化させる駆動源としてのモータ12を備え、電極13をワーク2から遠ざける引上げ動作と、ワーク2から遠ざけた電極13を、放電加工を行う加工位置よりもワーク2から離れた減速開始位置まで第1の速度で移動させる引下げ動作と、減速開始位置から加工位置まで第1の速度よりも低速の第2の速度で電極13を移動させる減速接近動作とを含むジャンプ制御を放電加工の合間に行う形彫放電加工機1であって、引上げ動作におけるモータ12の駆動電流をフィードバックデータとして検出する電流フィードバック検出部103と、支持部材に保持された電極13の重量に応じた減速開始位置を、フィードバックデータに基づいて決定する減速開始位置決定部102とを有する。
(もっと読む)
変形補償装置を具えたワイヤカット放電加工機
【課題】変形補償装置を具えたワイヤカット放電加工機の提供。
【解決手段】移動可能なクレーン、該移動可能なクレーンに取り付けられて該移動可能なクレーンの変形量を測定できる測定ユニット、該測定ユニットと電気的に接続されると共に該移動可能なクレーンの動作を制御する制御ユニットを包含し、該制御ユニットが移動可能なクレーンの変形量と位置誤差値の対照表を保存し、該移動可能なクレーンの変形量に基づき該移動可能なクレーンに対してフィードバック移動制御を行なう。
(もっと読む)
放電加工機
【課題】ジャンプパターンに応じて加工電極の位置を補正し、加工精度の向上が図られた放電加工機を提供する。
【解決手段】放電加工機の制御装置11は、ジャンプ動作の所定の動作条件に対応させて設定した変位量を記憶する記憶部25と、ジャンプ動作の動作条件及び記憶部25に記憶されたデータに基づいて加工電極とワークとの相対移動量を補正する補正部29とを有する。補正部29は、求めた補正量の情報を軸移動指令部21に送ることにより、送り軸移動指令部21が作成する移動指令を補正する。
(もっと読む)
6軸制御ワイヤ放電加工機
【課題】テーパ加工誤差を減殺できる6軸制御のワイヤ放電加工機。
【解決手段】撓んだワイヤ電極4の張架区間は、第1/第2の区間(A0→A1/B1→B0)と、直線状傾斜区間(A1→B1)に分割できる。下/上ガイドの支持点A0/B0は仮想的に上昇/下降して、A2,B2に変位する。δW,δZは、直線状区間A1B1の平均勾配に一致する傾斜直線と、点A0/B0を通り±W/±Z方向に平行な直線と交わる点をテスト加工で求め、θに関係付けて記憶する。テーパ加工実行指令(テーパ角度θ)の実行時に、上下ガイドの垂直位置を、テーパ角度θに対応するδZ,δWだけ下降/上昇させるようZ軸/W軸移動で補正する。
(もっと読む)
放電加工制御方法および放電加工制御装置
【課題】極間制御系への外乱を抑えて安定な加工状態を維持することにより加工速度を改善する。
【解決手段】被加工物の加工状態を検出する加工状態検出部102と、加工状態検出部の検出値をノッチ周波数によりフィルタリングするノッチフィルタ部103と、ノッチフィルタ部の出力値と加工状態の目標値との差を演算する差信号演算部105と、差と指令された電極の指令値とから電極の制御量を演算する制御量演算部106と、制御量演算部から出力された制御量により電極を所定方向に移動させると共に被加工物との対向面に垂直な回転軸を中心として回転させる電極駆動部(電極駆動装置)109とを備えている。
(もっと読む)
放電加工装置
【課題】誤差が発生した場合に加工で誤差が蓄積するのを防止し、加工時間が短く精度の高い経路を生成することができて、高速、高精度の加工を可能にする放電加工装置を提供する。
【解決手段】加工条件にそれぞれ対応する理想加工速度を予め設定して格納する理想加工速度格納手段35と、所定区間毎に加工が進行している実加工速度を検出する加工速度検出手段36と、上記実加工速度と理想加工速度とを比較し上記両速度の差異に応じて上記電極の位置を修正する電極位置修正手段38とを備えている。
(もっと読む)
放電加工制御方法および放電加工制御装置
【課題】電極回転時における電極の偏心や電気的特性変動に起因する極間制御系への外乱を抑え、安定な加工状態を維持することにより加工速度を改善する。
【解決手段】被加工物の加工状態を検出する加工状態検出部102と、加工状態検出部の検出値と加工状態の目標値との差を演算する差信号演算部105と、差と指令された電極の指令値とから電極の制御量を演算する制御量演算部106と、電極の回転時における偏心量を補正する補正量を演算する補正量演算部と、制御量を補正量により補正する制御量補正部1102と、制御量補正部から出力された補正された制御量により電極を所定方向に移動させると共に被加工物との対向面に垂直な回転軸を中心として回転させる電極駆動部(電極駆動装置)109とを備えている。
(もっと読む)
ワイヤカット放電加工方法
【課題】テスト加工をすることなく、ワイヤガイドのクリアランスが原因で発生するテーパ角度の誤差を補正して加工形状精度の低下を低減すること。
【解決手段】テーパ軸各軸の指令移動ベクトルU、Vから合成移動ベクトルUVを得て、通電体がワイヤ電極を押し出すV軸方向に直交するU軸方向の移動指令ベクトルUと合成移動ベクトルUVとからテーパ方向角度αを演算する。そして、通電体のオフセット方向V−と反対の方向にワイヤガイドのクリアランス量Lシフトした位置をワイヤ電極の軸中心の位置としてテーパ方向角度αとクリアランス量Lとから補正量を演算する。加工軸またはテーパ軸の指令移動ベクトルX、Y、U、Vのそれぞれに補正移動ベクトルx、y、u、vを加算して、クリアランスを原因とするワイヤ電極の位置決め誤差を補正する。
(もっと読む)
放電加工装置
【課題】 放電加工装置のサドルをX軸方向に移動させると、シール板と加工液保持槽の側面の間に作用する摩擦力によってサドルが回転変位し、真の電極位置とX軸駆動装置が取得する電極位置との間に誤差が発生するが。従来の放電加工機における電極位置指令の補正方法では完全な補正が困難であった。
【解決手段】 コラム5とベッド1もしくは加工液保持槽3との間にコラム5とベッド1もしくは加工液保持槽3との間の第1の方向の相対位置を検知する位置検出器44を備え、位置検出器44の信号と第1の駆動装置4bに対する位置指令と第2の駆動装置5bに対する位置指令とに基づいて電極の変位量を生成し、この変位量により第1の駆動装置4bに対する位置指令を補正するように構成した。
(もっと読む)
1 - 13 / 13
[ Back to top ]