
Fターム[3D012BB00]の内容
自動自転車、自転車のフレーム (1,379) | 他に分類されない自転車 (500)
Fターム[3D012BB00]の下位に属するFターム
Fターム[3D012BB00]に分類される特許
321 - 337 / 337
電動車両の速度制限

【課題】電動車両の速度を制御するためのコントローラ及び方法を提供する。
【解決手段】電動駆動部を有する車両の速度を制御するためのコントローラ及び方法が提供される。一実施形態では、電動駆動部を有する車両の速度を制御するための方法は、走行面の上を移動する車両の定常状態の平均トルクと加速又は減速中のトルクとを決定することを含む。車両の速度は、定常状態の平均トルクと、加速又は減速中のトルクと、走行面の上を移動する車両の少なくとも1つの接地要素にトルクを加える車両の電動駆動機構によって生成された、測定された回生電流と、車両の重量及びペイロードと、接地要素に加えられたトルクと、車両の加速度と、車両の速度とに基づいて制御される。
(もっと読む)
車両

【課題】旋回限界値を大きくすることが可能な横置き二輪の車両を提供する。
【解決手段】横置き二輪車両の旋回時における対策として、旋回限界値を把握する旋回限界推定システム、及び旋回限界値を向上させる重心位置調整システムを備える。旋回限界推定システムでは、重心位置と横方向加速度を高精度で推定することで旋回限界値及び旋回安定度を把握する。重心位置調整システムでは、推定した重心位置を向心力方向に移動させることで、旋回限界値を上げる。重心を移動させる機構として、i)車体の傾斜機構、ii)ウェイト(おもり)の移動機構、iii)シートの平行移動機構のうちの1つ以上が使用される。これにより、横置き二輪車両、特に、二輪間が狭く、重心位置が高い車両であっても、より速く、小さく曲がることが可能になり、旋回動作の走行性能、安定性、安全性の向上が図られる。
(もっと読む)
車両
【課題】車両に搭乗している重量体の状態に適した姿勢制御を行う。
【解決手段】本実施形態では、図1(a)、(b)に示すように、計測器による直接測定、及び/又は、制御結果(履歴)からの推定によって、現在の車両に搭乗している搭乗物を含めた被制御対象全体の実際の力学的特性量を得る(センシング)。そして、図1(c)、(d)に示すように、推定した力学的特性量に基づいて姿勢制御系における制御系特性量を修正することで、制御に利用する。
(もっと読む)
特性量推定装置及び搭載物判定装置
【課題】車両に搭乗している重量体の実際の力学的特性量を推定する。
【解決手段】
本実施形態では、図1(a)、(b)に示すように、計測器による直接測定、及び/又は、制御結果(履歴)からの推定によって、現在の車両に搭乗している搭乗物を含めた被制御対象全体の実際の力学的特性量を得る(センシング)。そして、図1(c)、(d)に示すように、推定した力学的特性量に基づいて姿勢制御系における制御系特性量を修正することで、制御に利用する。
(もっと読む)
倒立車輪型の移動体及びその制御方法
【課題】
倒立車輪型の移動体において車体が傾くことによって発生する問題を解決すること。
【解決手段】
本発明にかかる倒立車輪型の移動体100は、車輪18,22と車体12間の距離を可変にするスライド機構40を備えている。そして、当該移動体100は、姿勢制御モジュール45によって、スライド機構40を制御して車体12の車輪18,22の接地面からの高さが、車台16が倒立した状態から傾いた場合であっても一定となるように制御する。さらに姿勢制御モジュール45は、鉛直方向に対する車体12の角度が、車台16が倒立した状態から傾いた場合であっても一定となるように揺動機構を制御する。
(もっと読む)
車両
【課題】乗員を傾斜させて旋回する他車両と連係して、自己の車両の乗員を傾斜させて旋回し並走する車両に関し、乗員の快適性の向上を図ることができる車両を提供すること。
【解決手段】アクチュエータ装置58(UDアクチュエータ58UD)により乗員部支持部材340が昇降駆動されると、その乗員部支持部材340の昇降駆動により乗員部11が昇降される。これにより、並走し連係走行する2台の乗員車両310の各乗員部11の相対的な高さ位置を一致させることができる。よって、旋回内側に位置する乗員Pが旋回外側に位置する乗員Psを見下ろす格好、或いは、旋回外側に位置する乗員Psが旋回内側に位置する乗員Pを見上げる格好でコミュニケーションを図らなければならないといった乗員P,Psへの不快感を解消して、乗員P,Psの快適性の向上を図ることができる。
(もっと読む)
車両
【課題】旋回時の横転に対する安定性の向上を図ることができる車両を提供すること。
【解決手段】アクチュエータ装置54の駆動力により、第1車輪支持部21aと第2車輪支持部21bとの対向間隔が伸長される場合には、乗員支持部21cと乗員との自重により受面21c1が支持面21a1,21b1に対して相対的にスライドされつつ、受面21c1が支持面21a1と支持面21b1との対向間に挟入されることで、乗員支持部21cが第1車輪支持部21a及び第2車輪支持部21bに対して相対的に降下される。その結果、車両1の重心高を低くすることができると共に車両1に作用する横加速度(例えば、遠心力)への対抗性能を向上させることができるので、旋回時における車両1の横転や横滑りを抑制し、旋回性能の向上を図ることができる。
(もっと読む)
車両
【課題】簡単な仕組みにより倒立振り子車両の旋回特性を向上させる。
【解決手段】本実施の形態では、左右の駆動輪により走行する倒立振り子車両を、左右の駆動輪の回転軸を個別に制御することにより旋回を行わせる。左右の駆動輪は節を介してシャフトに固定してあり、個別に鉛直方向に回転軸を傾けることができるようになっている。一方、駆動輪の外輪部分は、幅方向中央部の外径が幅方向両端部の外径よりも大きくなるように丸みを帯びた凸形状に形成されている。そのため、駆動輪の回転軸を鉛直方向に傾けると、駆動輪の有効径が小さくなる。車両は、旋回の際に、内輪側の駆動輪の回転軸を傾けて有効径を小さくすることにより内外輪の有効径差を設け、これによって旋回を行う。
(もっと読む)
車両
【課題】簡単な仕組みにより倒立振り子車両の旋回特性を向上させる。
【解決手段】左右の駆動輪により走行する倒立振り子車両を、左右の駆動輪の外径サイズを個別に制御することにより旋回を行わせる。左右の駆動輪は同軸に固定してあり、車両は、旋回方向に対して外輪となる駆動輪の外径が内輪となる駆動輪の外径よりも大きくなるように駆動輪の外径を変化させることにより旋回する。また、内外輪の外径差により旋回方向に車両が傾くため、車両に作用する遠心力と重力の合力を車両の高さ方向に向けることができ、これによって車両の姿勢が安定する他、搭乗者が横方向に感じる遠心力を緩和することができる。駆動輪の外径の制御は、駆動輪のタイヤに充填されている空気の圧力を制御することにより行う。
(もっと読む)
車両
【課題】 車両の重心位置を所定位置に保つようにバランサを駆動する。
【解決手段】 車両は、搭乗部とは別体で、前後に自由に移動可能で、なおかつ各々独立制御が可能なバランサを複数設けることにより、車両全体の重心位置を所定位置に保つ。本実施の形態では、一例として、車両に、車軸の回りに個別に回転可能な第1バランサと第2バランサを備える。そして、車両は、搭乗部を所定の位置に姿勢制御する際に、姿勢制御に必要な必要な反力を計算すると共に、当該反力を発生させ、かつ、車両の重心の位置を所定位置に保つような第1バランサと第2バランサの角加速度を計算する。第1バランサと第2バランサは、それぞれ個別の駆動モータに接続されており、車両は、個々の駆動モータを算出した角加速度にて駆動する。これによって、車両は、全体の重心位置を所定位置に保ちながら姿勢制御に必要な反力を発生させることができる。
(もっと読む)
ホイールインモータ車両用のタイヤおよびそれを用いたホイールシステム
【課題】タイヤのクッション性、耐摩耗性等を損ねることなしに、急激な内圧低下に起因する、車体の安定性の低下のおそれを十分に取り除くとともに、タイヤの外径を十分に小径化することができる、ホイールインモータ車両用のタイヤを提供する。
【解決手段】ステップ2のそれぞれの側部に装着されるホイールインモータ型の一対の車輪に適用されるタイヤ13であって、ゴム外皮11内に、見かけ比重が0.78〜5.4mN/cm3で、発泡率が1275〜100%の独立気泡のフォーム12を収納配置し、外径Dを120〜450mm、接地幅Wを50〜100mmとしてなる。
(もっと読む)
連結車両、連結装置、及び車両
【課題】 連結可能な車両において、連結に応じたエネルギー源を提供する。
【解決手段】 各車両に小型のバッテリを備え、車両の連結装置に大型のバッテリを備える。各車両が単独走向する場合は、各車両に備えた小型のバッテリで走行し、各車両を連結してする場合は、連結装置に備えた大型のバッテリで走行する。単独走行する場合は、走行に不要な大型のバッテリを伴う必要が無く、エネルギー効率が高まる。また、連結走行して遠距離移動する場合は、大型のバッテリから走行に十分なエネルギーの供給を受けることができる。また、連結時においては、大型のバッテリや回生エネルギーによって小型のバッテリを充電し、いつでも単独走行に切替可能な状態に保つ。以上のように、連結可能な車両において、連結に応じたエネルギー源を提供することができる。
(もっと読む)
車両
【課題】 合体した複数の車両を緊急時に切り離して障害物を回避する。
【解決手段】 複数の車両が結合して合体した合体車両は、走行中に障害物の接近をセンサによって検知する。そして、ブレーキや旋回による回避が困難な場合は、車両の連結を解除して分割し、更に反発力によって分散させ、各車両の進行方向を障害物からそらせる。このように、結合を解除することにより各車両は個別に障害物を回避することができる。反発力には、例えば、ばねの弾性力、電磁石の磁力、火薬の爆発力、風力など、タイヤの摩擦力以外の力を用いる。単体の車両と異なり、ブレーキ、加速、旋回等により衝突の回避が困難な場合であっても、各車両の結合を解除することにより、複数の車両が連結しているという特徴を生かした障害物回避技術を実現することができる。
(もっと読む)
全方向移動ロボット及び該ロボットの全方向移動駆動機構
【課題】
全方向移動性・ホロノミック移動性を備えた小回りの利く移動ロボットを提供する。
【解決手段】
一つの球状走行体と、球状走行体を任意の方向に転動させる力を球状走行体に伝達する全方向移動駆動手段を備えたロボット本体と、ロボット本体を倒立振子型モデルで制御する制御手段と、を有する全方向移動ロボットである。好ましくは、球状走行体は弾性を有する。好ましくは、ロボット本体は、球状走行体を回転可能に保持する保持手段を有する。
(もっと読む)
平行2輪車及びその制御方法
【課題】 平行2輪車において良好にブレーキ制動を行わせる。
【解決手段】 ブレーキ検出装置6はブレーキレバー5の操作量を検出する。車両速度検出装置12は駆動ユニット2Aおよび2Bで検出された本体1と車輪との相対角速度と前後傾き検出装置4で検出された車両角速度とから現在の車両速度を求める。目標速度設定装置13はブレーキ検出装置6と車両速度検出装置12との出力から減速度を決定し、目標車両速度を決定する。車両位置検出装置14は駆動ユニット2Aおよび2Bで検出された本体1と車輪との相対角度と前後傾き検出装置4で検出された車両角度とから現在の車両位置を求める。目標位置設定装置15は目標車両位置を決定し、この目標位置設定装置15に車両位置検出装置14で検出された現在の車両位置が供給される。そして制御装置11は目標車両角度と目標車両角速度と目標車両速度と目標車両位置とに車両を安定的に追従させる。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 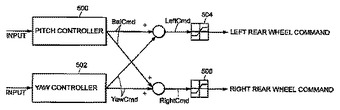 (もっと読む)
(もっと読む)
使用者の位置に基づく個人輸送機器の制御
移動したい方向や輸送機器の方向の入力を使用者に与える制御装置。制御装置は、検知された使用者の体の方向に基づく値を使用者による指定として受けるため入力部を有する。使用者が指定した入力は、多種の入力様式(超音波による体位置感知、足部の力の感知、ハンドルバーの傾斜、アクティブハンドルバー、体位置の機器的な測定、および線形滑動体の方向入力を含む)のいずれを用いても、使用者により伝達され得る。アクティブハンドルバーを含み得る装置は、車両の側方加速度による側方向の不安定性を軽減するような様式で乗り手が車両上で位置取りをするように提供される。  (もっと読む)
(もっと読む)
321 - 337 / 337
[ Back to top ]