
Fターム[3D012BB04]の内容
自動自転車、自転車のフレーム (1,379) | 他に分類されない自転車 (500) | 特殊な条件下 (18)
Fターム[3D012BB04]の下位に属するFターム
Fターム[3D012BB04]に分類される特許
1 - 13 / 13
移動体
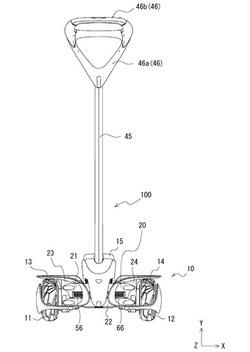
【課題】車両の操作感覚の犠牲を抑制しつつ、カント路上における移動体の走行状態を好適に確保すること。
【解決手段】倒立二輪型車両100は、一組の車輪(11、12)を回転制御して移動する移動体である。倒立二輪型車両100は、搭乗者によって操作されるハンドル部45と、搭乗者による操作に応じて姿勢変化したハンドル部45を初期姿勢へ復帰させるバネ56と、搭乗者による操作に応じて初期姿勢とは異なる第1姿勢へ変化したハンドル部45を、第1姿勢から初期姿勢までハンドル部45の姿勢が変化する過程の姿勢である中間姿勢まで、バネ56と共にハンドル部45を復帰させるバネ58と、を備える。更に、倒立二輪型車両100は、ハンドル部45が逆方向へ傾くことに対応するべく、バネ66、バネ68を有する。
(もっと読む)
車両の走行制御システム

【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
軌道自転車
【課題】ペダルを踏み込む際の台車本体への駆動力の伝達をスムーズに行わせることができるとともに、製造コスト及びメンテナンスコストが嵩んでしまうのを抑制することができる軌道自転車を提供する。
【解決手段】鉄道用レールに沿って走行し、当該鉄道用レールの保守及び点検を行うための軌道自転車において、一対の前輪1a及び一対の後輪1bと、人員が搭乗可能な台車本体2と、該台車本体2上に形成されて人員がペダル3を踏み込み可能としつつ着座し得る単一のサドル4と、台車本体2上のサドル4と隣接した位置に形成されて人員が着座し得るシート5と、ペダル3と連動して前輪1bを駆動し得る駆動シャフト6と、ペダル3に対する踏力を補助すべく駆動するモータ7と、モータ7に電力を供給するバッテリー8とを備えたものである。
(もっと読む)
車両
【課題】足踏みにより移動可能なコンパクトで安定性の高い車両を提供することにある。
【解決手段】車両100は、足踏みの往復運動を水平軸A1周りの回転運動に変えるペダル機構140、水平軸A1周りの回転を垂直軸B1周りの回転に変換する第1動力伝達機構150、垂直軸B1周りの回転を水平軸A2周りの回転に変更する第2動力伝達機構160、水平軸A2を回転軸とする駆動車輪130、水平軸A2を垂直軸B1周りに回転させる操舵機構170、駆動車輪とともに車両の自重を支える受動車輪121、122とを備える。これにより、駆動車輪と受動車輪は並列配置されるが、ペダル機構がそれらの上部に配置された構造とすることができ、更に、ペダル機構と第1の動力伝達機構と第2の動力伝達機構と操舵機構の一部を一体化した構造とすることができるので、足踏みにより移動可能なコンパクトで安定性の高い車両とすることができる。
(もっと読む)
倒立型移動体
【課題】倒立制御により移動を行う移動体において、移動する床面上に段差や固定された障害物などの凸部が存在する場合であっても、その凸部を乗り越えて移動を行うことを新たな構成を付加することなく可能とする倒立型移動体を提供すること。
【解決手段】断面が円形の回転体と、前記回転体を回転駆動させる駆動部と、前記回転体を保持する移動体本体と、前記駆動部を制御し、床面に接する前記回転体の回転駆動を制御することで移動体本体の倒立状態を維持する制御部と、を備える倒立型移動体において、床面に存在する凸部を乗り越える際に、前記回転体を凸部に接触させた状態で前記移動体本体の重心位置を移動方向前方に移動させ、前記制御部が倒立制御により回転体の駆動制御を行うように制御することで、回転体に凸部を乗り越えるトルクを与えるようにした。
(もっと読む)
三輪走行装置
【課題】前後方向だけでなく、横へも移動可能にした、三輪走行装置を提供する。
【解決手段】車軸が同一直線上に配置された第1車輪110及び第2車輪120と、第1車輪と第2車輪との間に配置され車軸が第1車輪及び第2車輪の車軸の延長線と直交する水平な直線上に配置された第3車輪130と、第1車輪,第2車輪及び第3車輪を別々に駆動するように各車輪に設けられた駆動手段と、各駆動手段を制御する制御手段と、を備え、各車輪110〜130が車輪外周に沿って並んで配置された複数の回転体31を備えている。
(もっと読む)
移動装置
【課題】傾斜地走行に適した6節リンク構成の移動装置を提供すること。
【解決手段】移動装置1は、リンク機構11と、リンク機構11と上端の間のヒンジ機構12とを有する垂直方向を向く第1のリンク部材10と、両端に設けられたリンク機構21、22と、中央部にヒンジ機構12と同軸で接続されるヒンジ機構23とを有する第2のリンク部材20と、両端にリンク機構を有する上リンク部材30及び下リンク部材40一端のリンク機構同士が同軸で接続されたものであって、その上リンク部材30の一端がリンク機構21と同軸で接続される右側リンク部材と、右側リンク部材とは左右対称に構成された左側リンク部材とを有する。リンク部材10、下リンク部材40、60のリンク機構が同軸で構成され、当該同軸で構成されたリンク機構を有する第1のリンク部材10により移動体13を回動自在かつ垂直方向に支持する。
(もっと読む)
走行車両
【課題】 傾斜面においても乗員の快適性と車体安定性を保持することができる走行車両を提供する。
【解決手段】 車体2と、車体2に回転可能に支持され、一軸上に設けた車輪12と、車体2を車輪12に対して左右に傾斜させる車体左右傾斜装置53と、を有する走行車両1において、斜面の傾斜角を測定する斜面傾斜角測定手段101と、斜面の鉛直線に対する車体の傾斜角を測定する車体傾斜角測定手段102と、斜面傾斜角測定手段101と車体傾斜角測定手段102との測定値から車体左右傾斜装置53を制御する演算処理装置111と、を備えたことを特徴とする。
(もっと読む)
車両
【課題】倒立振り子によって姿勢制御を行う車両でありながら、通常走行では通行できない段差が出現した場合であっても、その段差を昇降することのできる車両を提供すること。
【解決手段】本発明の車両によれば、段差検出手段によって段差が検出された場合には、バランサ接地手段によってバランサが路面に接地され、昇降制御手段によって、姿勢制御手段による姿勢制御を行いつつ、路面に接地されたバランサを支点として、車体の昇降が行われる。ここで、バランサは回転可能に設けられているので、段差が検出された場合には、路面に接地させたバランサを補助輪として機能させ、その補助輪を支点とすることによって、二輪車両では通常昇降し得ない段差の昇降の昇降が可能となる。その結果、昇降が不可能な段差を回避するための動作が不要となり、時間的及びエネルギー的な無駄を抑制することができる。
(もっと読む)
歩行体
【課題】多様な動作を実行可能な歩行体を実現すること。
【解決手段】歩行可能な歩行体であって、該歩行体が歩行するための脚と、該歩行体の姿勢を安定化させるための姿勢安定化手段と、を有することを特徴とする。また、整地での車輪走行モ−ドと、階段などの不整地での2足歩行モ−ドとの切り替え機能をも備えた構成としする。
(もっと読む)
軌陸兼用移動車装置
【課題】人力操作による軌道上での移動を可とし、左右駆動車輪相互の速度差(設定)による事故の発生を未然に防ぎ、自動二輪車運転免許非保持者では利用できない不便さのない軌道上および陸上兼用移動車を提供する。
【解決手段】互いに並行する一対の軌道レールa上を転動する前後それぞれ一対の車輪5A,5Bによって走行する台車1を備え、該台車1に一対の自転車8の各前輪7Aを載置し、前記一対の自転車8の動力車輪である各後輪7Bを前記軌道レールa上に前記軌道レールaに対応させて載置する。前記一対の自転車8は前記台車1に分離可能にして配置する。さらに前記前輪7A負荷重量に連携する規制片11を前記台車1の車輪5A,5Bの一方に設け、乗員降車時に前記台車1に対し制動力を付与する。
(もっと読む)
車両
【課題】 倒立振り子の姿勢制御を利用した車両において、制動による転倒を防止しつつ、速やかに制動を開始することができ、制動距離を短くする。
【解決手段】 倒立振り子車両において、制動時に空気抵抗を利用したエアーブレーキを駆動輪の駆動軸よりも上部に配置する。エアーブレーキは、停止時や通常走行時において車両本体内に収納され、又は進行方向に投影した面積が最少となる位置に配置され、制動時に進行方向の投影面積が大きくなるように開放する。駆動輪の制動により車体が進行方向前方に傾く力が働くのに対して、エアーブレーキを作動させることで進行方向投影面積が最大となり、空気抵抗により車体が進行方向後方に傾く力が働き、両者のバランスを調整することで姿勢制御が行われる。バランス調整は、エアブレーキの投影面積の変更と、駆動輪の制動力の変更との、少なくとも一方を変更することで調整を行う。
(もっと読む)
ピッチ調節による乗り物の制御
【課題】1以上の前輪と1以上の後輪とを備えた乗り物の安定性を積極的に維持し制御して、前輪が地面から離れたり外れたりした場合でもバランスのとれた動作を可能とする。
【解決手段】1以上の前輪と1以上の後輪を含む複数の車輪を備えた乗り物において、各後輪を駆動する1以上のモータアクチュエータと、モータアクチュエータを制御するコントローラとを設け、モータアクチュエータは、前輪が乗り物が走行する面に接触しているか否かとは無関係に一定の制御規則に従って乗り物を動的に安定化するように、モータアクチュエータを制御する。右後側及び左後側アクチュエータを設けて左右の後輪を独立して駆動するようにし、コントローラが左後輪と右後輪の差動回転を制御するようにして、乗り物のヨー制御を行う形態も可能である。
(もっと読む)
1 - 13 / 13
[ Back to top ]