
Fターム[3D030DC29]の内容
操向制御装置 (10,917) | 車両に据付けの操向部材の支持装置 (2,271) | ステアリングコラム (2,269) | 操舵角検出機構を有するもの (121)
Fターム[3D030DC29]に分類される特許
1 - 20 / 121
回転角度検出装置
操舵角センサ
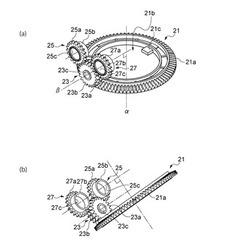
【課題】環状駆動ギヤの真円度によって、第1の従動ギヤ及び第2の従動ギヤに生じる回転角度の誤差の影響が小さくされて、ステアリングホイールの回転角度情報を精度良く生成することができる操舵角センサを提供する。
【解決手段】ステアリングホイールの回転に伴って回転する環状駆動ギヤ21と、それぞれマグネットが設けられて前記環状駆動ギヤ21の回転に応じて従動回転する第1の従動ギヤ25及び第2の従動ギヤ27と、を備え、前記第1の従動ギヤ25及び前記第2の従動ギヤ27の回転に基づく磁界の変化により前記ステアリングホイールの回転角度情報を生成するための操舵角センサにおいて、前記環状駆動ギヤ21と、前記第1の従動ギヤ25及び前記第2の従動ギヤ27と、の間に、それぞれのギヤ25、27と噛み合う中間ギヤ23を介在させる。
(もっと読む)
作業車両

【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
ステアリングハンドルの支持装置
【課題】回転センサ付き軸受に直接的に大きい負荷がかかることなく、ステアリングハンドルを重み付けする。
【解決手段】ステアリングハンドル付きのハンドル軸16を回転自在に支持する上下二段に配置された回転センサ付き軸受15U,51Dの外輪23を、軸受固定機構14によりチルトフレームに取り付け、ハンドル軸16に形成された鍔部31と、ハンドル軸16の基端面に突設された軸固定ねじ軸32にロックナット34を介して下段軸受15Dの内輪21の下面に係止される下面内係止リング33とを有す軸固定機構18を設け、コイルばね37により摺動板36を軸固定ねじ軸32の端面32Eに圧接させてハンドル軸に回転抵抗を付与するステアリングハンドルの重み付け機構19を設けた。
(もっと読む)
基準舵角検出装置
【課題】車両における舵角の基準となる基準舵角を検出する基準舵角検出装置において、ヨーレートセンサを用いることなく、より簡素な構成で基準舵角を検出できる技術を提供する。
【解決手段】基準舵角を検出する演算装置においては、自車両の舵角を繰り返し取得し(S360)、取得した舵角が変化したかを監視し(S320)、舵角が変化していないときにおける自車両の走行距離を検出する(S310〜S360)。そして、CPU11は自車両の走行距離がカーブにおける一定曲率部分の長さの想定最大値以上の値に設定された基準距離以上であるか否かを判定し(S350)、走行距離が基準距離以上であれば、このときの自車両の舵角を基準舵角として設定する。このような演算装置によれば、自車両が直線走行しているか否かを簡素な構成で判定することができるので、基準舵角についても簡素な構成で検出することができる。
(もっと読む)
操舵装置
【課題】操舵装置の信頼性を向上させる。
【解決手段】操作レバー22,23は、転舵駆動軸16にそれぞれ、連結装置40,42によって連結される。それら操作レバー22,23に加えられた操作力の合力が転舵駆動軸16に加えられ、操舵輪6が転舵される。また、操作レバー22,23の片方を操作すれば、転舵駆動軸16に操作力を伝達することができるのであり、連結装置40,42のいずれか一方が異常であっても、操作レバー22,23の少なくとも一方の操作力を転舵駆動軸16に加えることができる。さらに、電気系統が故障しても、転舵駆動軸16に操作力を加えることができる等操舵装置の信頼性を向上させることができる。
(もっと読む)
操舵装置
【課題】より簡単な構成により故障を判定することが可能な操舵装置を提供する。
【解決手段】操舵装置10のタイヤ角制御部29は、ステアリングホイール12を回転させる方向である主操作方向Mへの操作及びステアリングホイール12を傾斜させる方向又は押し引きする方向である副操作方向Sb1,Sb2への操作により自車両の操舵を行なう。フェイル判定部28は、主操作方向Mへの操作による入力値の変化と、副操作方向Sb1,Sb2への操作による入力値及びその変化とに基づいて操舵装置10が故障していると判定する。これにより主操作方向Mへの操作に係る操作系及び副操作方向Sb1,Sb2への操作に係る操作系それぞれに故障を判定する機能を備えなくとも、ステアリングホイール12を回転させる方向と傾斜させる方向等の2以上の操作方向への操作の入力値に基づいて故障の判定を行うことが可能となる。
(もっと読む)
情報提示装置
【課題】運転者に対して正確に情報を与えることが可能な情報提示装置を提供する。
【解決手段】情報提示装置1は、触覚刺激発生デバイス2と、ステアリングアングルセンサ3と、ECU4と、を備えている。ECU4は、制御部41と記憶部42とを含み、制御部41は、刺激量補正部43を有している。制御部41は、ステアリングアングルセンサ3により計測された操舵量と、この操舵量に基づいて算出した操舵角速度と、に基づいて運転者による操舵を検出する。刺激量補正部43は、運転者による操舵が検出された場合、触覚刺激発生デバイス2により発生する触覚刺激の刺激量を補正する。
(もっと読む)
コンバイン
【課題】運転部の足元空間を広くできると共に、ステアリング機構、チルト調節の機能、テレスコ調節の機能を収納したステアリングユニットを備えるコンバインを提供する。
【解決手段】本発明は、上端部に設けたステアリングハンドルと、前記ステアリングハンドルに連動連結したステアリング機構と、このステアリング機構を収納する略箱状のハンドル本体と、前記ハンドル本体の下方に配設し、ハンドルのチルト調節機能とテレスコ調節機能を有するチルト・テレスコ機構とによりステアリングユニットを構成すると共に、前記ステアリングユニットはキャビン前壁下部から上方に立ち上がり状に配設していることを特徴とする。
(もっと読む)
多回転角度検出装置
【課題】コンパクトでありながら大きな減速比を得られる多回転角度検出装置の提供。
【解決手段】多回転可能な第1回転体1の外周面に第1歯部1bを設け、この第1歯部1bに遊星歯車機構4の外輪歯車7の外歯部7aを噛合する。遊星歯車機構7は太陽歯車8と遊星歯車9および太陽歯車8に同軸配置された第2回転体2とを備えており、第2回転体2に第1磁石10を取着すると共に、第1磁石10に対向する第1磁気検出素子12を回路基板5に実装する。遊星歯車9は互いの歯数を異にする第1ギア部9aと第2ギア部9bを有しており、歯数の小さい方の第2ギア部9bを第2回転体2の第2歯部2aに噛合することにより、第1回転体1の回転に伴って第2回転体2が所定の減速比で低速回転する。
(もっと読む)
多周期的絶対位置検出器
本発明は、少なくとも1つの永久磁石を含む磁気位置検出器に関する。また本発明は、トーションバーにより連結された第1のシャフトと第2のシャフトとの間のトルクを検出する磁気装置に関する。本発明の目的は磁化ユニットの多周期的絶対位置を決定する装置を提供することである。従って本発明の主題は、少なくとも磁化ユニット(1)と、第1の磁気感受性プローブ(2)と、第2の磁気感受性プローブ(3)とを含む磁気位置検出器(A)である。第2の磁気感受性プローブ(3)は、この第2の磁気感受性プローブ(3)が作動しているか否かに関係なく磁石(1)の位置に関連する第2のデータを決定するために、絶対的、漸増的、かつ反転可能な方法で、磁場の完全な回転の回数を測定できる。検出器は、第1および第2のプローブ(2、3)にそれぞれ由来する第1および第2のデータに基づいて磁石(1)の絶対位置を計算するモジュールをさらに含む。 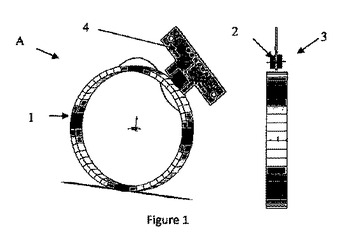 (もっと読む)
(もっと読む)
能動型振動制御装置
【課題】ステアリングホイールの舵角にかかわらず、打消し対象の振動を安定的に打ち消すことができると共に、設計の自由度を高めることが可能な能動型振動制御装置を提供する。
【解決手段】制御信号Scに基づいて打消し対象の振動Vaに対する相殺振動Vbを生成する。ステアリングホイール22の舵角θに応じて、制御信号Scの生成に用いる制御特性を切り替える。
(もっと読む)
自動車前輪の方向表示装置
【課題】自動車の前輪の方向を運転者へ視覚的に表示する装置を小型ローコストで実現する。
【解決手段】歯車3と歯車5との回転比率を該自動車固有のハンドル対前輪の首振り角度比に等しくすれば、リング状の歯車5は前輪の動きに同期することになる。この歯車5の回転角度をハンドルの中心部に設けた計器に伝えるため、磁化したリング状の歯車5を、パイプの外周にはめ込む。すると歯車5からの磁力線は非磁性体のパイプを貫通するので、パイプ内の棒磁石6は歯車5と磁気結合(マグネティック、カップリング)して一体化する。そこで棒磁石6の軸に、ハンドル中心部に具えた計器の指針7を適正に取りつければ、指針はハンドルの回転と無関係に常に前輪の方向を示すことができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、安価な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一または第二の検出手段15または16のいずれかを磁石16Aと、直交配置された複数のホール素子16Bと16Cから形成すると共に、制御手段17がこの複数のホール素子16B、16CとAMR素子15Bからの検出信号を用いて、先ず回転体11の概略の回転角度を検出し、この後、AMR素子15Bからの検出信号を用いて、詳細な回転角度を検出することによって、安価なホール素子16Bや16Cを用いることができるため、安価な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出装置
【課題】コストダウンを十分に図った上で回転角に対応する検出角を一義的に検出することができる回転角検出装置を提供すること。
【解決手段】本発明による回転角検出装置1は、回転体の回転角に単位範囲毎に一義的に対応する検出角θを検出する検出手段9aを備え、検出角θは、単位範囲内において回転角θrの増加に伴い最小値θminから最大値θmaxに線形に増加するとともに、回転角θrの増加に伴い単位範囲と単位範囲の増加側に隣接する単位範囲の境界において最大値θmaxから最小値θminに変化する特性を有し、回転体の回転範囲を単位範囲以内に設定し、検出角θが最大値θmaxまで増加した直後に最小値θminに減少した場合に、検出角θに最大値θmaxから最小値θminを減じた値θallを加算する加算処理を開始する補正手段9bを備えることを特徴とする。
(もっと読む)
伝達比可変装置
【課題】静粛性を向上させることが可能な伝達比可変装置を提供する。
【解決手段】本発明の伝達比可変装置20は、装置本体20Hから下方に回転出力シャフト40を延ばしてなり、その回転出力シャフト40は、同軸上に並べて連結された第1〜第3の構成シャフト41,42,43から構成されている。そして、第2,第3の構成シャフト42,43同士を直動可能かつ一体回転可能に嵌合結合することで、車両10の衝突時の圧力により回転出力シャフト40を圧縮変形可能とし、上第1,第2の構成シャフト41,42同士を遊嵌しかつ周面間を防振ゴム44で連結したことで、振動が回転出力シャフト40より下方に伝達することを抑え、静粛性の向上を図っている。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、広範囲の周囲温度で回転体の回転の偏心やがたつきが小さく、高精度な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転体11の中空筒部11Bに内規制部11Dと外規制部11Eを設け、ケース18に両規制部11D、11E間に所定の隙間を有して突出する略リング状の突起部18Bからなる保持部18Aを設けて、周囲温度が高温や低温で用いられた時に、突起部18Bに内規制部11Dまたは外規制部11Eの少なくともいずれか一方が摺接するようにして回転保持されることによって、中空筒部11Bと保持部18Aとの隙間をより小さくでき、回転体の回転時の偏心やがたつきが小さくなるため、簡易な構成で、広範囲の周囲温度で高精度な回転角度の検出が可能なものにすることができる。
(もっと読む)
車両の操舵装置
【課題】車両の操縦性を高める、左右ハンドルによる操舵・走行制御システムを提供する。
【解決手段】動力式の走行装置20L,20R及び旋回装置31L,31Rを有した車両10の操舵装置である。この操舵装置は、互いに独立した回転が可能に車体に取り付けられた左右の操作ハンドル81L,81Rと、左右の操作ハンドルを互いに同じ回転方向へ回転させたときの、第1の回転角に応じて旋回装置を制御する旋回制御部と、左右の操作ハンドルを互いに逆回転方向へ回転させたときの、第2の回転角に応じて走行装置の前進、後進及び走行速度を制御する走行制御部とを有している。旋回制御部及び走行制御部は制御部63に含まれている。
(もっと読む)
回転角検出装置
【課題】構造を複雑化することなく、耐久性に優れた360度超検出可能な回転角検出装置を提供すること。
【解決手段】ドリブンギヤ4の歯41の径方向外端面を連ねてなる歯先円43上におけるドリブンギヤの一つの歯41の周方向幅L1を、ドライブギヤ3の各歯31の径方向外端面を連ねてなる歯先円33上におけるドライブギヤ3の一つの歯31の周方向幅L2よりも大きく設定する。好適には円弧歯車が採用される。被検出回転軸2に固定されたドライブギヤ31は永久磁石5が固定されたドリブンギヤ4を回転させ、永久磁石5の回動による磁界変化を検出して被検出回転軸2の回動角を検出する。
(もっと読む)
車両用操舵角検出装置
【課題】構造の複雑化や大型化を抑止しつつ信頼性向上を実現した車両用操舵角検出装置を提供すること。
【解決手段】車両用操舵角検出装置10が出力する操舵角θsと、通常において車両に搭載される車載センサである操舵トルク検出装置11、車両回転角速度検出装置12及び車輪速検出装置13の検出信号との相関関係を利用して、操舵トルク検出装置11が検出した操舵角θsが、この相関関係を示すラインを含む所定許容範囲から逸脱する場合に、車両用操舵角検出装置10の故障と判定する。
(もっと読む)
1 - 20 / 121
[ Back to top ]