
Fターム[3D034BA02]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構の目的、機能 (526) | 操舵性能の向上 (267) | 操舵安定性、直進性 (76)
Fターム[3D034BA02]に分類される特許
1 - 20 / 76
自走車両
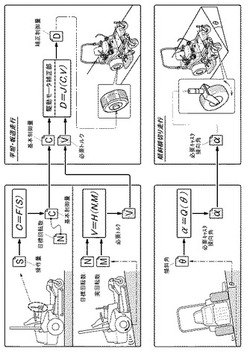
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
車両用サスペンション装置およびそのジオメトリ調整方法

【課題】車両用サスペンション装置の操縦性・安定性を向上させること。
【解決手段】車輪を回転自在に支持する車軸を有するアクスルキャリアと、前記車軸より車両上下方向の上側で車体と前記アクスルキャリアとを連結する懸架用上側リンク部材と、前記車軸より車両上下方向の下側で前記車体と前記アクスルキャリアとを連結する懸架用下側リンク部材と、前記車軸より下側で前記車体と前記アクスルキャリアとを連結する転舵用リンク部材と、を含み、前記懸架用上側リンク部材のアッパーピボット点と前記懸架用下側リンク部材のロアピボット点とを通るキングピン軸のキャスタトレイルがゼロ、かつポジティブスクラブに設定されている車両用サスペンション装置とした。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置を備え、後輪5l、5rのトー角可変制御される後輪トー角可変式の自動車Vに設けられ、後輪のトー角の制御に供される後輪トー角制御装置において、ヨーレートを検出するヨーレートセンサと、横加速度を検出する横加速度センサとを備え、検出されたヨーレートと横加速度とに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角をトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角をトーアウト側に設定する。
(もっと読む)
キャンバシステム
【課題】クランク機構に角度検出部を取り付けるための作業を簡素化することができ、クランク角を確実に検出することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、駆動部、回転体、及び回転体に取り付けられ、回転体の回転角度を検出する角度検出部を備えたキャンバ可変機構と、回転体が初期位置に置かれた状態で前記角度検出部によって検出される初期値Ksに基づいて、前記所定の車輪にキャンバを付与し、キャンバの付与を解除する際の角度検出部の稼動範囲を設定する稼動範囲設定処理手段と、回転体が回転させられている状態で角度検出部によって検出される現在角に基づいて、回転体の回転角度を稼動範囲に対する相対角度で算出する回転角度算出処理手段とを有する。回転体に角度検出部を取り付けるための作業を簡素化することができる。
(もっと読む)
サスペンション装置
【課題】重心位置に偏りがある車両における制動時の安定性をより簡単な構成で向上させることができる技術を提供する。
【解決手段】サスペンション装置1は、車輪102と車体とを、制動時に車輪102が車体に対して進行方向後方に変位可能に連結するよう構成されたサスペンション装置である。サスペンション装置1は、制動時に車輪102が進行方向後方に変位することで車輪102のトー角が変化して、車両の重心位置Gの車幅方向における偏りによって制動時に生じるヨーモーメントを打ち消すためのヨーモーメントが発生するように、車輪102と車体とを連結している。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化を報知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出し、右操舵時及び左操舵時の期間内平均値を平均し表示用ヨーレートゲインを算出する。車両用制御装置100は、ヨーレートゲインモニタ画面85に表示することで、第1キャンバ状態及び第2キャンバ状態の表示用ヨーレートゲインの差を報知する。
(もっと読む)
車輌のサスペンション構造
【課題】第1に、ショックアブソーバーがナックルブラケットに、緩むことなく安定的に固定され続け、第2に、もって構成部材の破損等が防止され、操縦安定性も向上する、車輌のサスペンション構造を提案する。
【解決手段】このサスペンション構造は、車体A側と車輪B側間に、一体化されたコイルスプリング1およびショックアブソーバー4と、車輪B側に取付けられるナックルブラケット9とが介装された、独立懸架式よりなる。車高調整式よりなるショックアブソーバー4の本体部5は、全体的に雄ネジ14が螺刻されており、ナックルブラケット9の外筒部12の上部10の雌ネジ11と螺合することにより、下部8が外筒部12に貫挿取付けされている。そして、ショックアブソーバー4の雄ネジ14と螺合するトップロックナット15およびロアーロックナット16にて、外筒部12が上下から締付けられている。
(もっと読む)
電動アクチュエータ制御装置およびこれを備えた車両の後輪トー角制御装置
【課題】後輪トー角制御装置において、作動量検出手段が故障した際に故障判定期間中に車両の走行フィールが悪化することを抑制する。
【解決手段】設定した制御指示値および作動量検出手段による実測値に基づいて電動アクチュエータ11を制御する後輪トー角制御装置10であって、ストロークセンサ17による実測値と制御指示値との差が所定の閾値S以上あり、且つストロークセンサ17による実測値が変化しない場合に故障が疑われる異常状態と判定し、異常状態が第1判定時間T1にわたって継続した場合にストロークセンサ17の故障と判定するものであり、異常状態が判定された場合、ストロークセンサ17の故障が判定される前に電動アクチュエータ11の作動を停止させるように構成する。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
車両の後輪操舵制御装置
【課題】指示トー角への実トー角の追従性を向上させる車両の後輪操舵制御装置を提供する。
【解決手段】車両の左右後輪の指示トー角を設定する指示トー角設定手段119と、車両の運動状態量を検出する状態量検出手段17と、を備え、指示トー角と検出された実トー角との偏差に基づき操作量を算出し、この操作量に基づいて車両の左右後輪に設けられたアクチュエータ11を作動させることによってトー角を変化させる後輪操舵制御装置である。本装置は、偏差を積分する積分手段124と、前記アクチュエータの制御特性に起因した前記指示トー角、前記実トー角、もしくは前記偏差の変動に応じて前記積分手段の偏差の積分量を減少させる指令を行うリセット指令手段120とを備える構成とする。
(もっと読む)
車両の操舵制御装置
【課題】後輪トー角制御装置がトーアウト状態で失陥した場合に、操舵応答性が過敏になることを低減する補償制御を行い、車両の挙動が不安定になることを回避すること。
【解決手段】後輪トー角制御装置が故障と判定されれば、電動式パワーステアリング装置70のステアリングアシスト力を低減するなどして操舵応答性を補償する。
(もっと読む)
車両の後輪トー角制御装置
【課題】舵角センサ等のセンサが失陥した場合の後輪トー角制御装置のフェールセーフアクションが、車両挙動を乱すことも、運転者に違和感を与えることもなく適切に行われるようにすること。
【解決手段】車両が旋回している状態では、後輪トー角を中立に戻すフェールセーフアクションを行わず、車両が直進走行している場合に限って後輪トー角を中立に戻すフェールセーフアクションを行う。
(もっと読む)
車両用シート
【課題】運転に支障を来すことなく後輪トー角可変装置の作動を容易に乗員に認識させるようにする。
【解決手段】後輪トー角可変装置16を備えた自動車1に設けられるシート30において、乗員40の両大腿41の側方に配置されたサイドサポート33と、モータ駆動されてサイドサポート33の内側面33aを車幅方向に変位させるサポート部材34とを備えるように構成し、サポート部材34は内側面33aの変位を後輪トー角可変装置16の作動に応じて行うようにする。
(もっと読む)
障害物回避支援装置
【課題】乗員に違和感を与えることなく、又は、与える違和感を少なくして車高を上げることが可能な障害物回避支援装置1aを提供する。
【解決手段】車高調整装置9を制御して車高を調整し、車両Cに障害物を跨いで回避させる障害物回避支援装置1aにおいて、車両Cの状態量に応じて、障害物を跨ぐ際の車高を変化させ、車両Cが旋回中には、車両Cの車輪11、21の舵角を調整する舵角制御装置1bを制御して、障害物に内輪近傍を通過させ、車高を変化させる際には、車両Cの後輪21の舵角を調整する舵角制御装置1bを制御して後輪21をトーインにする。
(もっと読む)
車両制御装置
【課題】RTCの制御と左右前輪の駆動力配分の制御とを組み合わせて、車両の安定化と旋回のしやすさとを併せて実現させることができる車両制御装置を提供する。
【解決手段】低速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより増加し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより減少することにより、走行中の車両の旋回性能を向上させる。また、高速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより減少し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより増加することにより、走行中の車両の安定性能を向上させる。
(もっと読む)
操舵装置
【課題】操舵ハンドルの操作に応じてアクチュエータを作動させて車輪を操舵する操舵装置において、走行安定性を向上させること。
【解決手段】端部に車輪30a,30bが連結されたロッド9a,9bと、操舵ハンドルの操作に応じて作動してロッド9a,9bを移動させることによって車輪30a,30bを操舵するアクチュエータ1とを備える操舵装置100において、アクチュエータ1は、車体に揺動自在に支持され、かつロッド9a,9bを軸方向に移動させる第1アクチュエータ10と、第1アクチュエータ10を揺動させ、その揺動に伴ってロッド9a,9bを上下方向に移動させる第2アクチュエータ20とを備える。
(もっと読む)
後輪操舵装置
【課題】直進状態のカント路走行時において修正操舵による負担を解消する。
【解決手段】カーナビゲーションからの直進路情報RS信号により直進路走行を判定する直進判定部22と、操舵角θsと車速Vとに基づいて、基準ヨーレイトγfを求めるフィードフォワード部23と、規範ヨーレイトγsを求める規範モデル部24と、規範ヨーレイトから実ヨーレイトγを減算するコンパレータ25と、基準ヨーレイトにコンパレータの結果を加算する加算器27と、加算値に基づいて後輪転舵角δrを求めて駆動制御するアクチュエータ駆動制御部28とを設ける。直進状態のカント路走行時に直進させるべく操舵した場合に、操舵角に応じて後輪を転舵することにより、操舵角を0にしても車両を直進させることができるため、運転者はステアリングホイールをハンドルセンター位置にした操舵力を必要としない楽な状態で直進路を走行することができる。
(もっと読む)
リアトー制御装置
【課題】車両が所定の種類の施設の位置にあるときは、運転者の駐車操作を支援するように後輪のトー角を設定するリアトー制御装置を提供する。
【解決手段】駐車場や洗車場など、車両Vを駐車する施設を所定の種類の施設とする。車両Vのナビゲーション装置8は、車両Vの位置が所定の種類の施設の位置と一致したこと、又は車両Vの位置が所定の種類の施設の位置の近傍であることを検出すると、車両制御ECU10にナビゲーション信号Nsを入力するように構成する。そして、車両制御ECU10は、ナビゲーション信号Nsが入力されたら、左右の後輪2L,2Rをトーインにする指令を、トー角変更制御ECU37を介してアクチュエータ30に与え、アクチュエータ30が動作して左右の後輪2L,2Rをトーインにする。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時の乗り心地を改善することができる車両の後輪操舵制御装置を提供する。
【解決手段】 車体1と後輪3rl,3rrとの間に介装され、伸縮することによって後輪3rl,3rrのトー角を変更する電動アクチュエータ8を備えた車両の操舵制御装置6であって、車両Vが走行している路面の状態を推定する路面状態推定手段(路面状態推定部63)を有し、路面状態推定手段63によって悪路判定がなされた場合、アクチュエータ8を中立状態に維持することを特徴とする。
(もっと読む)
路面摩擦係数推定装置
【課題】発進直後でも適切な路面摩擦係数を推定可能にする。
【解決手段】イグニッション・オンIGと、前輪の操舵角θsと、車速Vとの各信号に基づいて直進を判定する直進判定部22と、直進判定により後輪をトーインまたはトーアウトに転舵する制御を行うアクチュエータ駆動制御部23と、後輪転舵時の負荷を電流積算値として算出する負荷算出部25と、負荷に応じてマップ27から推定路面摩擦係数μrを求める路面摩擦係数推定部26とを設ける。運転者が操作する以前からある程度の路面摩擦係数を設定することが可能になり、操舵してから求められる路面摩擦係数との間での路面摩擦係数の大きなジャンプが抑制され、路面摩擦係数を用いて車両制御を行うようにした自動車において、発進から最初の操舵時における車両制御を円滑に行うことができる。
(もっと読む)
1 - 20 / 76
[ Back to top ]