
Fターム[3D034CC04]の内容
操向リンク系及び4WS (6,986) | 4WSの操舵装置 (983) | 補助操舵機構と4WS機構との関連 (338)
Fターム[3D034CC04]の下位に属するFターム
Fターム[3D034CC04]に分類される特許
1 - 20 / 52
後輪転舵装置
車両操舵装置
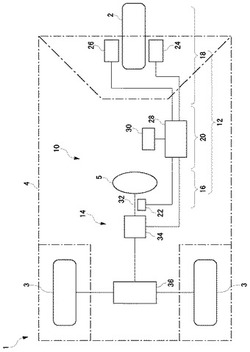
【課題】ステアバイワイヤ装置のフェール時に十分な車両の運動を確保するための車両操舵装置を提供する。
【解決手段】ステアバイワイヤ装置12により転舵する第1の車輪2と、運転者のための操作部材5との機械的連結により転舵する第2の車輪3と、を備える車両1のための車両操舵装置10は、操作部材5への入力により回転可能に操作部材5に連結されている回転軸32と、回転軸32の回転可能範囲を制限するための回転角抑制機構34と、を備える。回転角抑制機構34は、ステアバイワイヤ装置12のフェール時に回転可能範囲を超える回転を回転軸32に許容するよう構成されている。
(もっと読む)
車両制御システム

【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
後輪転舵装置の中立位置復帰装置
【課題】運転者の違和感を低減することのできる後輪転舵装置の中立位置復帰装置を提供する。
【解決手段】第1圧縮コイルばね64および第2圧縮コイルばね65の復元力により第1可動部材66および第2可動部材67を移動させることにより後輪転舵軸43を中立位置に復帰させる。このとき、第1可動部材66および第2可動部材67に対して油圧ダンパー80を用いて抵抗を付与することによりこれらの円筒部材の移動速度を低下させる。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回状態量が過大になることを防止しつつ、車両の軌跡が運転者の希望に則した目標軌跡になるよう前輪及び後輪の舵角を制御する。
【解決手段】前舵角可変装置14又はバイワイヤ式の操舵装置96と、後輪操舵装置60とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定した時点に於ける運転者の操舵操作量及び車速に基づいて前輪の暫定の目標舵角を演算し、暫定の目標舵角に基づいて車両の旋回状態量を推定する(S350〜500)。旋回状態量の大きさが基準値を越えないときには暫定の目標舵角に基づいて前輪の舵角を制御する。旋回状態量の大きさが基準値を越えるときには基準値を越えないよう補正された旋回状態量に基づいて前輪及び後輪の目標舵角を演算し、目標舵角に基づいて前輪及び後輪の舵角を制御する(S600)。
(もっと読む)
車両の制御装置
【課題】ドライバビリティの低下を招くことなく車両を目標走行路に追従させる。
【解決手段】操舵輪(FL、FR)に連結された操舵装置に操舵トルクを供給可能な操舵トルク供給手段(400)と、操舵伝達比を変化させることが可能な操舵伝達比可変手段(200、600)とを備えた車両(10)を制御する装置(100)は、車両を目標走行路に追従させるための目標状態量を設定する設定手段と、車両の状態量がこの設定された目標状態量となるように操舵伝達比可変手段を制御する第1制御手段と、前記操舵トルクとして車両を目標走行路へ追従させるにあたり操舵装置に発生する操舵反力トルクを抑制する操舵反力抑制トルクが供給されるように操舵トルク供給手段を制御する第2制御手段と、ドライバの操舵入力が生じた場合に該操舵入力に基づいて操舵反力抑制トルクを補正する補正手段とを具備する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
後輪操舵装置
【課題】旋回軸の損傷を防止すると共に、内部の損傷を検知可能な後輪操舵装置を提供すること。
【解決手段】電動モータの回転力をロッド1の軸方向への移動に変換することによって車両の後輪を操舵する後輪操舵装置100であって、電動モータの回転力をロッド1の軸方向への移動へと変換する変換機構3,5と、ロッド1の軸方向への所定量以上の移動を規制するためのストッパ10とを備え、ロッド1は、ロッド1が軸方向へ移動する際にストッパ10に当接して、ロッド1のストローク量を規定するストローク量規定部12と、ロッド1に過大な軸方向荷重が作用した場合に、ロッド1のストローク量が小さくなるように変形する変形部13とを備える。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】μスプリット路面での制動時、車両重心回りのヨーモーメントが増加することなく、ドライバの修正操舵量を減少することのできる車両用制御装置および車両用制御方法を提供する。
【解決手段】目標後輪転舵角演算部72が目標後輪転舵角を演算する。目標後輪転舵角補正部74は、μスプリット路判断部73が、路面がμスプリット路であると判断した場合、目標後輪転舵角を小さく補正した目標後輪転舵角補正値を演算する。この目標後輪転舵角補正値に基づいて後輪転舵角を補助操舵する。これにより、車両重心回りに発生するヨーモーメントを減少する。よって、μスプリット路の制動時における、ドライバによる修正操舵が容易になる。
(もっと読む)
ステアリング装置付きサスペンション
【課題】 車輪の転舵角を大きくできるステアリング装置付きサスペンションを提供する。
【解決手段】 ステアリング装置は、車両幅方向に伸び第1ジョイント16fL〜16rRにて転舵手段に連結したステアリング・シャフト6fL〜6rRと、これに第2ジョイント17fL〜17rRにて連結した変向歯車組及びこれに噛み合う転舵歯車組を支持する第1アクスル・ハウジング7fL〜7rRと、これに揺動可能に取り付けられて転舵歯車組により回動し車輪10f〜10rRを転舵する第2アクスル・ハウジング8fL〜8rRとを有する。サスペンションは、第1アクスル・ハウジング及び車体30間を揺動可能に支持するロア側リンク部材13fL〜13rR及びアッパ側サスペンション部材11fL〜11rRを有する。ステアリング・シャフトに車体及び第1アクスル・ハウジング間を揺動可能に連結するサスペンションのリンク機能を持たせた。
(もっと読む)
後輪操舵装置
【課題】 極低速走行時においても電動モータの消費電力を抑えつつ後輪を転舵できるようにする。
【解決手段】 ハンドル舵角θhから基本目標後輪転舵角δr0*(n)を算出する(S401)。左右後輪の車輪速センサの出力するパルス信号のカウント値Npl,Nprからタイヤ転がり距離Xを算出する(S402)。タイヤ転がり距離XにゲインGを乗じた値を許容舵角変化量G・Xとし、基本目標後輪転舵角δr0*(n)と直前回の目標後輪転舵角δr*(n-1)との偏差が許容舵角変化量G・Xより大きい場合には(S403:Yes)、直前回の目標後輪転舵角δr*(n-1)に許容舵角変化量G・Xを加算また減算して目標後輪転舵角δr*(n)を算出する(S406,S407)。
(もっと読む)
車両の後輪操舵装置
【課題】簡単且つ安価なロッド支持機構で、車両に対する搭載性に優れた後輪操舵装置を提供する。
【解決手段】ハウジング1の内周面に台形雌ねじ部11が形成され、ロッド2の外周面に、台形雌ねじ部と常時螺合する台形雄ねじ部21が形成されると共に、これから所定距離離隔した外周面に外歯22が形成される。この外歯と螺合するように減速機構4がハウジングに支持される。更に、減速機構に連結されロッドに平行に配置された回転軸31を有するモータ3が、ハウジングに支持され、モータの回転駆動に応じてロッドが軸方向に駆動される。
(もっと読む)
車両の後輪トー角制御装置
【課題】左右後輪のトー角を個別に制御可能な車両において、後輪をトーインまたはトーアウト状態として旋回走行する際に、旋回内側の後輪タイヤの摩耗を抑制するとともに、横力を効率的に発生させる。
【解決手段】自動車1の左右後輪5のトー角を個別に制御可能な後輪トー角制御装置27が、自動車の加減速量を検出する加減速量検出手段24,25と、加減速量に基づき、左右後輪の目標トー角をトーイン側またはトーアウト側に設定する目標後輪トー角設定部32とを備え、目標後輪トー角設定手段が、自動車の旋回走行の際に、旋回内側後輪の目標トー角を減少させる構成とする。
(もっと読む)
操舵角補正装置
【課題】補正された補正操舵角の微係数が、不感帯の両端において連続な微係数を与える操舵角補正装置を提供する。
【解決手段】原点0を中心として横軸上に±符号が異なるだけで所定の大きさの点AL〜ARを第1の操舵角区間R1(不感帯)として設定する。第1の操舵角区間R1のプラス側の外側の第2の操舵角区間R2Rでは、点ARよりやや右上の点BRを起点として、操舵角θの変化量と補正操舵角θ’の変化量との関係が1対1、つまり、傾きが+1の直線lRを設定してある。また、点ARと点BRの中間に、点BRから直線lRを横軸に向けて延長した線より左側で、かつ、点ARとBR点とを結ぶ直線より下方で、θ’が正の所定の点CRを設定し、点ARと点CRとBR点とを通り、両端が直線のスプライン補間を行なう。第1の操舵角区間R1のマイナス側の外側の第2の操舵角区間R2Lでも同様に、原点0を中心に、点対称に設定する。
(もっと読む)
リアトー角制御装置の調整方法およびリアトー角制御装置の製造方法
【課題】アクチュエータの伸縮可能な範囲の最大伸縮量と最小伸縮量の平均値において、リアトー角をゼロ度にすることが可能なリアトー角制御装置の製造方法を提供する。
【解決手段】伸縮して左右の後輪2のトー角を独立に変更するアクチュエータ10と、アクチュエータ10の伸縮量を計測する位置センサ18とを有し、伸縮量に基づいてアクチュエータ10を伸縮させるリアトー角制御装置1の製造方法であって、アクチュエータ10が伸ストッパ20によって伸長が止まるまで伸長させ、伸ストッパ20によって伸長が止まっている際の伸縮量を最大伸縮量として記憶し、アクチュエータ10が縮ストッパ19によって縮小が止まるまで縮小させ、縮ストッパ19によって縮小が止まっている際の伸縮量を最小伸縮量として記憶し、最大伸縮量と最小伸縮量との平均値を算出することにより、伸縮量の中点を学習する。
(もっと読む)
車両の後輪転舵装置
【課題】後輪転舵装置を備えた車両において、走行中にイグニッションスイッチがオフ状態からオン状態へと切り替えられた場合でも、走行安定性や操縦性の低下を抑制する。
【解決手段】車両1の左右後輪5の転舵に供されるアクチュエータ11と、車両の走行状態に応じてアクチュエータの目標作動位置を設定する目標作動位置設定部32と、イグニッションスイッチ13がオン状態の場合、目標作動位置設定部から出力された目標作動位置の情報に基づき、アクチュエータを駆動制御する駆動信号生成部33と、アクチュエータの実作動位置を検出する作動位置センサ16とを備え、目標作動位置設定部が、イグニッションスイッチのオフ状態からオン状態への切替の際に、目標作動位置と実作動位置との間に暫定作動位置を設定し、その暫定作動位置を目標作動位置の情報として駆動信号生成部に出力することで、後輪転舵角の急激な変化を防止する。
(もっと読む)
1 - 20 / 52
[ Back to top ]