
Fターム[3D034CC09]の内容
操向リンク系及び4WS (6,986) | 4WSの操舵装置 (983) | 補助操舵機構と4WS機構との関連 (338) | 電気式補助操舵機構 (211)
Fターム[3D034CC09]に分類される特許
1 - 20 / 211
後輪転舵装置
自動車
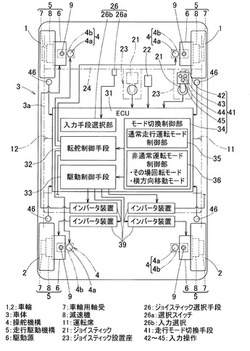
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
ステアリング制御装置

【課題】走行モードの切換時において簡単な制御によって作業性を向上させたステアバイワイヤ方式のフォークリフトのステアリング制御装置を提供する。
【解決手段】ハンドルと、ドライブ輪と、制御手段と、走行モード切換手段と、第1および第2の走行モードにおけるハンドルの操作角度θHとドライブ輪の旋回角度θDの第1および第2の対応関係とθDの第1および第2の有効角度範囲を記憶する記憶手段とを備え、ハンドルが第1の操作角度θH1に配置されてドライブ輪がθH1に対応する第1の旋回角度θD1に配置された状態の第1の走行モードを第2の走行モードへ切換える時、θD1が第2の有効角度範囲になく、θH2=θH1+360×N(Nは整数)なる第2の操作角度θH2に対応する第2の旋回角度θD2が第2の有効角度範囲に存在する場合に、制御手段はθH1を第2の有効角度範囲のθD2に対応するθH2に変更してθD1をθD2に変更する。
(もっと読む)
インホイールモータ車用転舵装置
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
後輪転舵装置
【課題】規制部材を小型化することが可能な後輪転舵装置を提供する。
【解決手段】ローター61Aと一体的に回転する回転部材71の回転をロック軸規制部材150に減速して伝達する。ロック軸規制部材150は、ロック軸91を挿入可能な通過孔152を有する。通過孔152は、後輪転舵軸50の中立並進位置に対応する箇所に形成される。回転部材71は、ロック軸91を挿入可能な規制穴71Bを有する。ロック軸91は、後輪転舵軸50が中立並進位置に位置するときに通過孔152を介して規制穴71Bに挿入される。回転部材71の回転は、ロック軸91が規制穴71Bに挿入されることによって規制される。後輪転舵軸50は、回転部材71の回転が規制されることに応じて並進の規制を受ける。
(もっと読む)
車両操舵制御システム
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
電気自動車の車体構造
【課題】インバータのメンテナンスを容易にする。
【解決手段】車両のフレームFの床面よりも上に座席Sを備えるようにし、走行用モータ34に電力を供給するバッテリ51と、前記走行用モータ34用に電力を変換するインバータ50とを、車両のフレームFの床面よりも下に収納するようにした電気自動車の車体構造において、前記バッテリ51を前記座席Sよりも前方に、前記インバータ50を前記座席の直下に配置する電動自動車の車体構造とした。バッテリを座席よりも前方に、インバータを座席の直下に配置したことにより、座席を取り外すことで、インバータが床面を通じて上方に露出させることができ、インバータのメンテナンスを容易にすることができる。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
車両操舵装置
【課題】ステアバイワイヤ装置のフェール時に十分な車両の運動を確保するための車両操舵装置を提供する。
【解決手段】ステアバイワイヤ装置12により転舵する第1の車輪2と、運転者のための操作部材5との機械的連結により転舵する第2の車輪3と、を備える車両1のための車両操舵装置10は、操作部材5への入力により回転可能に操作部材5に連結されている回転軸32と、回転軸32の回転可能範囲を制限するための回転角抑制機構34と、を備える。回転角抑制機構34は、ステアバイワイヤ装置12のフェール時に回転可能範囲を超える回転を回転軸32に許容するよう構成されている。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
後輪転舵装置の中立位置復帰装置
【課題】運転者の違和感を低減することのできる後輪転舵装置の中立位置復帰装置を提供する。
【解決手段】第1圧縮コイルばね64および第2圧縮コイルばね65の復元力により第1可動部材66および第2可動部材67を移動させることにより後輪転舵軸43を中立位置に復帰させる。このとき、第1可動部材66および第2可動部材67に対して油圧ダンパー80を用いて抵抗を付与することによりこれらの円筒部材の移動速度を低下させる。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
後輪転舵ロック装置
【課題】四輪操舵車が一定速度以上の走行状態になるのに応じて、後輪の転舵をロックすることができる後輪転舵ロック装置を提供すること。
【解決手段】後輪転舵ロック装置70は、後輪3と一体回転可能に設けられたロック部材74と、ロック部材74の近傍に固定配置された嵌合部75とを含んでいる。四輪操舵車1が高速走行状態になることで、ロック部材74が遠心力によって径方向外側へ変位して嵌合部75に嵌まり込むので、後輪3の転舵ができない状態になる。一方、四輪操舵車1が進行速度を落すことで後輪3の回転速度も落ちて遠心力も低下するので、ロック部材74が径方向内側へ引っ込んで嵌合部75に嵌まり込まなくなり、後輪3の転舵のロックが解除される。このように後輪3の回転に伴う遠心力を利用した簡易な機械式構成によって、四輪操舵車1が高速走行状態において後輪3の転舵をロックすることができる。
(もっと読む)
後輪操舵装置
【課題】中立状態に戻りきる前に後輪の転舵がロックされた場合に、後輪を中立状態まで確実に復帰させることができる後輪操舵装置を提供すること。
【解決手段】後輪操舵装置11は、車幅方向にスライドすることによって1対の後輪3を転舵させる後側ラック軸40と、後側ラック軸40に設けられて外側からピンが嵌まり込むことのできる凹部61と、進退することで凹部61に嵌まり込んだり凹部61から外れたりできるピン部材63とを含んでいる。ピン部材63は、進出状態にあるときには凹部61に嵌まり込むことで、中立位置にある後側ラック軸40のスライドをロックし、退避状態にあるときには凹部61から外れて後側ラック軸40のスライドロックを解除する。後側ラック軸40には、凹部61を中心に後側ラック軸40の長さ方向の両側に連設され、進出状態のピン部材63を凹部61へ案内するためのガイド溝62が形成されている。
(もっと読む)
後輪転舵装置
【課題】後輪舵角の中立位置の検出精度を向上させて、良好な車両直進性能を得る。
【解決手段】転舵ロッド31の軸線方向の移動によりロータが回転するレゾルバ60を設ける。レゾルバ60は、後輪舵角が中立位置となるときの電気角が0度、90度、180度、270度の何れかになるようにステータに対するロータの回転位置が設定されている。これにより、後輪舵角の中立位置において、レゾルバ60の2相検出信号から計算される電気角θeに誤差が発生しなくなり、後輪舵角を中立位置に維持することができる。この結果、車両の直進性能が向上する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
走行駆動換向装置
【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
1 - 20 / 211
[ Back to top ]