
Fターム[3D034CD10]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | 車両の位置 (27)
Fターム[3D034CD10]に分類される特許
1 - 20 / 27
自動車の車体構造
【課題】車両旋廻時、車両後部が車両前部よりも旋廻外側に張り出すことを防止し、外輪差を気にすることなく運転できる自動車の車体構造を提供すること。
【解決手段】本発明の自動車の車体構造は、前輪3L,3Rの舵角θ2よりも後輪4L,4Rの舵角θ1が逆位相で相対的に大舵角とする舵角制御手段5と、右旋廻時に右側最大車体基準円11の内側に収まり、左旋廻時に左側最大車体基準円21の内側に収まる外側形状を有する車体2と、を有する。そして、右側最大車体基準円11は、右旋廻時最小回転半径の中心位置Pを中心点とし、車幅方向中心位置Oをはさんで中心位置Pと反対側の車体2上に設定する左車体基準点10を通る。また、左側最大車体基準円21は、左旋廻時最小回転半径の中心位置Qを中心点とし、車幅方向中心位置Oをはさんで中心位置Qと反対側の車体2に設定する右車体基準点20を通る。
(もっと読む)
車両用前後輪転舵制御装置

【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
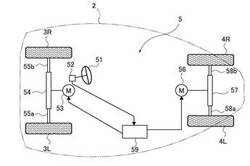
走行駆動換向装置
【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
車両の制御装置
【課題】ドライバビリティの低下を招くことなく車両を目標走行路に追従させる。
【解決手段】操舵輪(FL、FR)に連結された操舵装置に操舵トルクを供給可能な操舵トルク供給手段(400)と、操舵伝達比を変化させることが可能な操舵伝達比可変手段(200、600)とを備えた車両(10)を制御する装置(100)は、車両を目標走行路に追従させるための目標状態量を設定する設定手段と、車両の状態量がこの設定された目標状態量となるように操舵伝達比可変手段を制御する第1制御手段と、前記操舵トルクとして車両を目標走行路へ追従させるにあたり操舵装置に発生する操舵反力トルクを抑制する操舵反力抑制トルクが供給されるように操舵トルク供給手段を制御する第2制御手段と、ドライバの操舵入力が生じた場合に該操舵入力に基づいて操舵反力抑制トルクを補正する補正手段とを具備する。
(もっと読む)
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両用転舵制御装置
【課題】車両を走行中の車線上から逸脱しにくくすることにある。
【解決手段】自車位置検出手段が、走行中の車線上での車両の車線幅方向の位置を検出し、また操舵方向検出手段1が、ステアリングホイールの操舵方向を検出し、そしてヨー角制御手段3が、ステアリングホイールの操舵方向が車両を走行中の車線上から逸脱させる方向である場合の方が車両を走行中の車線上の車線幅方向目標位置に接近させる方向である場合より、ステアリングホイールの操舵角に対する車両のヨー角変化を小さくすることを特徴とする車両用転舵制御装置である。
(もっと読む)
車両舵取り装置
【課題】タイミングベルトにて連動する複数の操舵軸を独立して回転させることにより、本体を移動させずにその位置で自由な方向に回転させることができる車両舵取り装置を提供する。
【解決手段】車両12の本体14に回動自在に保持された三個以上の操舵軸16と、各操舵軸16にそれぞれ設けられた駆動輪22と、各駆動輪22を独立して回転駆動するためにそれぞれ設けられた駆動源(駆動モータ30)と、各操舵軸16を連動して回動させるための連動装置(タイミングベルト34)と、この連動装置(タイミングベルト34)による各操舵軸16の連動を解除するための連動解除手段(解除クラッチ36)と、少なくとも一つの操舵軸16を本体14に固定するための固定手段(固定クラッチ38)とを備える。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
後輪転舵車両
【課題】自車両が走行車線から逸脱した場合であっても、迅速かつ安定的に元の走行車線に復帰することを可能とする。
【解決手段】左右の後輪5を独立して転舵させるアクチュエータ13と、アクチュエータを駆動制御する後輪トー角設定部42と、走行車線からの逸脱を検出する車線逸脱検出部43と、運転者によるステアリング操作を検出する操舵角センサ23とを備えた自動車1において、走行車線からの逸脱とともに運転者による元の走行車線への復帰操作が検出された場合、後輪トー角設定部が、旋回内側の後輪を中立に保持するとともに、旋回外側の後輪をトーインまたはトーアウト側に転舵させる構成とする。
(もっと読む)
走行支援装置
【課題】直進走行に対する外乱が発生しやすい直線の道路を検知したときに、車両の直進走行を支援する走行支援装置を提供することを課題とする。
【解決手段】直進走行に対する外乱が発生しやすい道路である指定道路を走行しているとき(ステップS1→Yes)、その指定道路が直線の場合は(ステップS2→Yes)、左右の後輪をトーインして(ステップS3)直進性を向上し、直進走行を支援する。そして、指定道路から抜けたときには(ステップS4→Yes)、左右の後輪のトーインを解除して(ステップS5)通常のトーインに戻し、タイヤの磨耗などの影響を最小限に抑える。
(もっと読む)
操舵制御装置
【課題】運転者が意図する運転内容と運転者による操舵操作の内容とが矛盾する場合に、運転者が意図しない運転内容を実現させてしまうのを防止する操舵制御装置を提供すること。
【解決手段】前後輪の操舵を制御可能な操舵制御装置100は、運転者が意図する車両の運転内容を事前に判断する運転内容判断手段10と、その運転内容と矛盾する操舵操作を禁止又は抑制する操舵操作制限手段14とを備える。
(もっと読む)
コンテナクレーンの走行制御装置
【課題】駆動輪に取り付けられた走行モータの回転数を個別に制御して、直進走行させる際の駆動輪間の速度差を小さくすることができ、コンテナクレーンを運転するオペレータの乗り心地を向上させることができるコンテナクレーンの走行制御装置を提供すること。
【解決手段】タイヤ式走行装置11eにより、コンテナヤードに並列にして設けられた複数の帯状のコンテナ設置スペースに沿って走行するコンテナクレーン3の走行制御装置13であって、前記コンテナヤードの設計段階における設計値、あるいは竣工時に実際に計測した計測値に基づいて作成されたコンテナ設置スペース毎の傾斜方向、傾斜量、および傾斜量に対応した前記タイヤ式走行装置11eの旋回角をデータベースとして備え、走行しようとするコンテナ設置スペースが変わる度に、前記タイヤ式走行装置11eの旋回角を設定し直すように構成されている。
(もっと読む)
車輪ステアリング角を調整するためのステアリング装置
【解決手段】 この発明の代表的な実施例によれば、自動車両の車輪の車輪ステアリング角を調整するためのステアリング装置が開示されている。このステアリング装置は、車輪ガイド部材およびステアリング制御ユニットを有する。
このステアリング制御ユニットは、ステアリング角設定値に基づく車輪ガイド部材の移動を調整するための基本的なステアリング機能およびアクチュエータ移動制御システムを有する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備える。
(もっと読む)
車両用後輪操舵装置
【課題】車両の状態が緊急回避状態にある場合に、車体の横運動を最大限に制御することで衝突回避動作を行ない、ドライバによる回避操作の運転負荷を低減する。
【解決手段】車両の後輪を操舵するための操舵機構を備えた車両において、車両の状態が緊急回避状態か否かを判定する緊急状態判定手段と、後輪操舵量を制御する後輪操舵制御手段とを備え、少なくとも緊急状態であると判定された場合には車体の横運動が安定になるように後輪操舵量を同相制御することを特徴とする四輪操舵車。
(もっと読む)
四輪操舵式無人搬送車の操舵制御方法
【課題】曲線外側への車体の膨らみを最小限としながら曲線内側へのはみ出しも抑えて曲率の大きな曲線を円滑に走行することができる四輪操舵式無人搬送車の操舵制御方法を提供する。
【解決手段】四輪操舵式無人搬送車が曲線を走行する際の制御方法であって、曲線進入前の直線走行状態(地点A)から、曲線入口部での前輪操舵段階(地点A〜B)と、曲線部での前後逆位相操舵段階(地点B〜C)とを行って曲線を走行するように制御する。さらに、曲線出口部で後輪操舵段階(地点C〜D)を行い、曲線を出たとき(地点E)には直線走行状態に復帰させる制御を行う。
(もっと読む)
制御装置及び車両
【課題】構造の複雑化を抑制しつつ、路面段差通過時の乗り心地の向上を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2がキャスター角αを有して懸架されている。よって、車輪2へ付与される回転駆動力が増加(減少)されると、その増加(減少)により発生される変動力によって、懸架装置6が伸長(短縮)され、車高(車輪2と車体フレームBFとの間の距離)が高く(低く)される。これにより、路面の段差を通過する際に発生する車高変化に対し、その車高変化とは逆位相の車高変化を回転駆動力の増減により発生させることができるので、車両の姿勢を一定に維持して、乗り心地の向上を図ることができる。また、アクティブサスペンションによる姿勢制御のように、油圧源や油圧配管などを別途設ける必要がなく、その分、構造を簡素化することができるので、部品コストの削減や車両の軽量化を図ることができる。
(もっと読む)
車両の操舵装置
【課題】 乗員に違和感を与えることなく車両を目標軌道に沿って走行させる。
【解決手段】 画像ECUは、道路の左右の白線を認識し車両の目標軌道となる道路中央線を求めるとともに、道路中央線に対する車両の横方向変位量D、車両姿勢角θおよび道路中央線の曲率半径Rを算出する。メインECUは、画像ECUで算出された横方向変位量D、車両姿勢角θに基づいて車両の目標ヨーレートγ*および目標車体スリップ角β*を算出し(S25,S26)、この目標ヨーレートγ*および目標車体スリップ角β*が得られるような前後輪の目標転舵角δf*,δr*を算出して(S27)、前輪モータECUおよび後輪モータECUに転舵制御指令を出力する(S28)。
(もっと読む)
車両及び車両の表示装置
【課題】車両の周囲に存在する障害物に関する情報を視覚的に操作者に認識させる。
【解決手段】独立操舵支援表示システムは、車両の移動の妨げとなる障害を検知する監視センサを用いて車両の周囲の状態のモニタリングを行う。そして監視センサにより障害物が検知された場合、車両と検知された障害物との相対的な位置関係に基づいて、指定された操舵モードに対応する車両の移動制限領域を特定する。また、独立操舵支援表示システムは、操舵モードにおける指定条件に基づいて、想定される車両の移動軌跡を特定する。そして、特定された車両の移動制限領域、車両の移動軌跡、車両図が示されたアシスト画面を表示させる。このような操作者の操作を支援するためのアシスト画面を、車両の移動期間、連続して更新させることにより、車両の操作との連携がとられた支援を操作者に対して行うことができる。
(もっと読む)
1 - 20 / 27
[ Back to top ]