
Fターム[3D034CE04]の内容
操向リンク系及び4WS (6,986) | 4WSの制御及び制御対象 (1,188) | 車輪の操舵制御 (828) | 後輪の操舵制御 (525) | 操舵方向、位相 (94)
Fターム[3D034CE04]に分類される特許
1 - 20 / 94
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
車輪転舵装置

【課題】前輪の転舵動作に連動する入力軸の回転により後輪の転舵動作に連動する出力軸を回転させるときの入出力特性を適切なものとする。
【解決手段】車輪転舵装置において、入力軸側レバー54は、前輪の転舵動作と連動する入力軸30の回転にしたがって回動する。第1出力軸側レバー60および第2出力軸側レバー64は、各々が入力軸側レバー54と係合して回動されることにより、後輪の転舵操作と連動する出力軸32を回転させる。第1出力軸側レバー60は、前輪が右に転舵されたときに入力軸側レバー54に係合される。第2出力軸側レバー64は、前輪が左に転舵されたときに入力軸側レバー54に係合される。入力軸側レバー54は、前輪の転舵方向に応じて第1出力軸側レバー60および第2出力軸側レバー64のうち係合する出力軸側レバーを切り換える。
(もっと読む)
車輪転舵装置
【課題】前輪の転舵動作に連動する入力軸と後輪の転舵動作に連動する出力軸との間に差動が生じるよう入力軸と出力軸とを遊星ギヤを用いて連結する車輪転舵装置において、操舵角が小さい範囲と大きい範囲の双方において入力軸と出力軸との入出力特性を適切なものとする。
【解決手段】車輪転舵装置において、遊星ギヤ44は、前輪の転舵動作と連動する入力軸30の回転にしたがって太陽ギヤ42aに噛み合いながら太陽ギヤ42aの外周に沿って移動する。レバー46は、後輪の転舵動作に連動する出力軸32と遊星ギヤ44とを連結する。連結切換機構60は、入力軸30の回転角度が所定角度に達したときに、遊星ギヤ44とレバー46とを介して入力軸30と出力軸32とが連結される第1の機械的連結状態から、回動部材40と第2ピン50とを介して入力軸30と出力軸32とが連結される第2の機械的連結状態に切り換える。
(もっと読む)
車両の後輪操舵装置
【課題】コストアップや重量増加を招くことなく後輪を操舵して車両の旋回走行安定性を高めることができる車両の後輪操舵装置を提供すること。
【解決手段】後輪1をトーションビーム式のリヤサスペンション2によって車体に懸架する車両の後輪操舵装置12を、前記後輪1に駆動力を伝達するプロペラシャフト5の回転をラック14の車幅方向の往復直線運動に変換するラックアンドピニオン機構(運動変換機構)13を設け、該ラックアンドピニオン機構13によって変換されたラック14の往復直線運動を左右のタイロッド15を介して前記リヤサスペンション2に伝達し、該リヤサスペンション2をその車体取付点の弾性を利用して左右方向に傾けるように移動させて前記後輪1を操舵するよう構成する。
(もっと読む)
ステアリングシステム
【課題】 車両の使用される状況や車両の特徴等に合う実用性の高いステアリングシステムを提供することを課題とする。
【解決手段】 ステアリングシステムが、運転者によって操作されるステアリングホイール26を有する操作装置16と、前輪14Fを回転可能に保持しつつ、その前輪を転舵させる前輪転舵装置18と、ステアリングホイールの操作に応じて前輪転舵装置による前輪の転舵を実現させる伝達装置20とを有し、伝達装置を、車両が直進する状態からのステアリングホイールの操作量が、第1操作量と、その第1操作量よりも大きな第2操作量との間にある場合に、ステアリングホイールの操作に拘らず車輪を転舵させないように構成する。それにより、前輪の転舵を途中で制限し、横滑り等の不安定な走行状態の発生を防止しつつ、必要に応じ、前輪を大きく転舵させることができる。
(もっと読む)
操舵装置
【課題】左右車輪のトー角を調節するとともに、左右車輪を操舵する操舵装置を提供する。
【解決手段】車両の左右車輪(後輪)2a、2bを操舵する操舵装置1であって、車体に取り付けられる操舵ハウジング50と、この操舵ハウジング50に収容され左右車輪2a、2bに連携する操舵ロッド10と、操舵ハウジング50に対して操舵ロッド10を左右方向に移動する操舵機構9と、操舵ロッド10の長さを左右方向について変えるトー角調整機構14とを備える。
(もっと読む)
車両の制御装置
【課題】ドライバビリティの低下を招くことなく車両を目標走行路に追従させる。
【解決手段】操舵輪(FL、FR)に連結された操舵装置に操舵トルクを供給可能な操舵トルク供給手段(400)と、操舵伝達比を変化させることが可能な操舵伝達比可変手段(200、600)とを備えた車両(10)を制御する装置(100)は、車両を目標走行路に追従させるための目標状態量を設定する設定手段と、車両の状態量がこの設定された目標状態量となるように操舵伝達比可変手段を制御する第1制御手段と、前記操舵トルクとして車両を目標走行路へ追従させるにあたり操舵装置に発生する操舵反力トルクを抑制する操舵反力抑制トルクが供給されるように操舵トルク供給手段を制御する第2制御手段と、ドライバの操舵入力が生じた場合に該操舵入力に基づいて操舵反力抑制トルクを補正する補正手段とを具備する。
(もっと読む)
制御装置
【課題】流量制御弁の制御の安定性を向上させ、それに伴い油圧アクチュエータの駆動制御を安定化させると共に、油圧アクチュエータの応答性を確保できる制御装置を提供すること。
【解決手段】流量制御弁10の目標開度は、油圧アクチュエータ11の駆動量と目標駆動量とに基づいて設定されるので、流量制御弁10の開度と油圧アクチュエータ11の駆動量とを関連付けられる。さらに、流量制御弁10の開度をフィードバックして流量制御弁10の開度を調整するので、流量制御弁10の制御の安定性を向上させ、それに伴い油圧アクチュエータ11の駆動制御を安定化させると共に、油圧アクチュエータ11の応答性を確保できる。
(もっと読む)
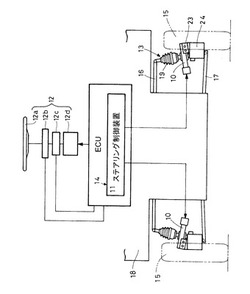
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
電動台車
【課題】積載荷重による走行性能の変動が少なく、転回・斜行・横行の機能を備え舵取りも容易で未熟練者であっても容易に操作することができるパワーアシスト付きの電動台車を提供する。
【解決手段】台車底部の四隅に前輪2と後輪3とを配設し、操作部6を備えた運転制御部5を設け、該運転制御部5により旋回方向及び駆動力を制御される電動駆動輪4を配設した電動台車であって、運転制御部5は電動駆動輪4をパワーアシストするパワーアシスト制御部55と、操作部6に加えられる前後進の操作力を検出するセンサ7と、操作部6による電動駆動輪4の旋回角度を検出する角度センサ8とを備え、前輪2にはこの角度センサ8から出力された信号により前輪2を操舵する操舵機構部10を設け、電動駆動輪4に対し前輪2の同位相及び逆位相への操舵と、前輪2の中立固定の機能を備える。
(もっと読む)
四輪操舵装置
【課題】四輪操舵装置を装備した自動車において、操舵走行時における後輪の走行抵抗を減少する。
【解決手段】車速と前輪操舵角とにより二輪モデルとして設定されたマッブ42aから後輪操舵角を求め、前輪操舵角と後輪操舵角とによる旋回半径を求め、旋回半径の旋回中心を中心として左右後輪がそれぞれ円周上を転動するように各後輪の転舵角を決定する後輪転舵角決定部42を設け、その決定された各転舵角となるように、後輪制御部41により、左右後輪を対応する各後輪転舵用アクチュエータ11L,11Rにより転舵制御する。操舵走行時に後輪を転舵した場合に、後輪の左右輪(内外輪)が同一の旋回中心となるように転舵されるため、旋回中心のずれによる走行抵抗の大小の違いが生じなくなり、左右輪間の摩耗差や燃費の悪化が低減され得る。
(もっと読む)
後輪操舵装置
【課題】四輪操舵自動車で低速走行時にハンドル取られが生じた場合でも、車体の進行方向がハンドルが取られた方向へ助長されるのを抑制する。
【解決手段】操舵角速度算出部22aと、操舵角と操舵角速度とから操舵状態を判定する操舵状態判定部22bと、操舵角と車速とから後輪転舵の制御を決定する後輪転舵制御部22cと、操舵状態判定信号と後輪転舵信号とにより後輪の逆相制御のゲインを調整する逆相ゲイン調整部22dとを設け、操舵状態がハンドル取られ状態になったら逆相ゲインを小さくする。ハンドル取られによる車両の挙動が後輪の操舵増大により増大されてしまうことを抑制し得るため、低速走行時の前輪操舵走行状態でハンドル取られが生じても何等違和感が生じること無く運転し続けることができる。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
車両の制御装置
【課題】 操舵に対する逆ロールの応答性を確保でき、制動力を向上させることができる車両の制御装置を提供すること。
【解決手段】 旋回方向内側への横移動の反力、あるいは車体の逆ロールによって、車両が受ける反力ロールモーメントを算出する反力ロールモーメント算出部104と、反力ロールモーメントを抑制する平面運動アクチュエータ部108の平面運動制御量目標値を設定する平面運動制御量目標値算出部105と、算出した平面運動制御量目標値に基づいて、平面運動アクチュエータ部108を制御する平面運動制御部106を備えた。
(もっと読む)
車両
【課題】容易に任意の方向に平行移動することが可能な車両を提供する。
【解決手段】2つの前輪及び2つの後輪からなる車輪と、前記車輪にそれぞれ連結され、前記車輪を操舵する4つの操舵用アクチュエータと、前記車輪にそれぞれ連結され、前記車輪を駆動する4つの駆動用アクチュエータと、任意の方向に傾倒されることで操作可能であり、前記操舵用アクチュエータの動作を指示するジョイスティック64と、前記駆動用アクチュエータの動作を指示するアクセルペダル63と、ジョイスティック64が傾倒された場合、ジョイスティック64が傾倒された方向に前記車輪を操舵するとともに、アクセルペダル63が操作された場合、アクセルペダル63の操作量に基づいて前記車輪を駆動するコントローラ100と、を具備した。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】μスプリット路面での制動時、車両重心回りのヨーモーメントが増加することなく、ドライバの修正操舵量を減少することのできる車両用制御装置および車両用制御方法を提供する。
【解決手段】目標後輪転舵角演算部72が目標後輪転舵角を演算する。目標後輪転舵角補正部74は、μスプリット路判断部73が、路面がμスプリット路であると判断した場合、目標後輪転舵角を小さく補正した目標後輪転舵角補正値を演算する。この目標後輪転舵角補正値に基づいて後輪転舵角を補助操舵する。これにより、車両重心回りに発生するヨーモーメントを減少する。よって、μスプリット路の制動時における、ドライバによる修正操舵が容易になる。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両制御装置
【課題】後輪転舵装置に温度検出手段を設けずに、後輪転舵装置の過熱を抑制する車両制御装置を提供する。
【解決手段】車両制御装置において、電動パワーステアリング装置は、運転者による操舵量に応じて前輪用モータを駆動し、車両のステアリング機構に操舵補助力を与える。後輪転舵装置は、後輪用モータ68を駆動し、後輪を転舵する。温度センサ30は、前輪用モータ28の温度を検出する。後輪転舵装置は、後輪用モータ68への通電を制御するEPS−ECU56を有する。EPS−ECU56は、温度センサ30の出力にもとづいて後輪用駆動機構への通電量を導出し、温度センサ30で検出した温度が第1の所定値を超えると、後輪用モータ68への通電量を制限する。
(もっと読む)
1 - 20 / 94
[ Back to top ]