
Fターム[3D037FA14]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・安全装置の入力信号 (984) | 車外の状態によるもの (92) | 路面状態 (73)
Fターム[3D037FA14]の下位に属するFターム
Fターム[3D037FA14]に分類される特許
1 - 20 / 30
運転者状態検出システム及び運転者状態検出方法
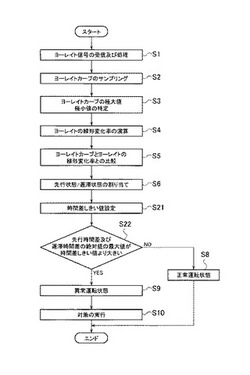
【課題】適切な運転者状態判定しきい値を用いて運転者の異常運転を正確に特定する。
【解決手段】車両のヨーレイトを検出し(S1)、検出されたヨーレイトの実測値の増減が反転する反転ポイントを特定し(S3)、特定された2つの反転ポイントを結ぶ線分から決まる所定時間毎のヨーレートを演算し(S4)、演算された所定時間毎のヨーレートとヨーレイトの実測値との偏差を演算し(S5、S6)、偏差を運転者状態判定しきい値と比較して運転者の状態が異常であるか否かを判断し(S22、S8、S9)、車両の挙動及び運転者による運転操作の少なくとも一方に応じて運転者状態判定しきい値を可変設定する(S21)。
(もっと読む)
運転支援装置

【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
四輪駆動車両の駆動力制御装置
【課題】発進性の向上を図ることが可能な四輪駆動車両の駆動力制御装置を提供する。
【解決手段】四輪駆動車両の駆動力制御装置1は、エンジン2での発生トルクをトランスミッション30を介して主駆動輪1L、1Rで出力した場合の第1駆動力と、エンジン2での発生トルクにより発電機7で発電を行い、発電された電力によりモータを駆動させたときの発生トルクを従駆動輪3L、3Rで出力した場合の第2駆動力とのうち、どちらの駆動力が大きくなるかを判断する判断部と、判断部による判断結果に基づいて駆動力調整を行う駆動制御部とを備えている。
(もっと読む)
トラクション制御装置及び方法
【課題】車両の荷重抜けに対応して駆動力を適切に制御する。
【解決手段】トラクション制御装置(100)は、車両(1)に搭載され、車両の駆動輪(DW)に伝達される駆動力を調節可能な駆動力調節手段(13、14)と、駆動輪のスリップ状態を検出するスリップ状態検出手段(20)と、車両の上下方向の接地荷重の変動を検出する接地荷重変動検出手段(24)と、スリップ状態検出手段により駆動輪のスリップ状態が検出されたことを条件に、検出された接地荷重の変動に応じて、駆動力を調節するように駆動力調節手段を制御する制御手段(20)とを備える。
(もっと読む)
運転状態判定装置
【課題】自車の走行環境やドライバの日頃の癖を考慮した運転状態の精度の高い判定を行う。
【解決手段】判定処理部7により、自車1の検出位置とドライバの運転操作の検出とに基づき、走行路に対して自車の位置を修正するドライバの運転操作の閉ループモデルの制御特性からドライバの運転操作特性を算出し、通常時の運転操作特性と最新の運転操作特性との差から、走行環境やドライバの日頃の癖の影響を受けないようにしてドライバの運転状態を精度よく判定する。
(もっと読む)
駆動力制御装置
【課題】車輪にブレーキトルクを与える場合に、加速性が低下することを抑制できる駆動力制御装置を提供する。
【解決手段】車両の左右または前後に配置された第1の車輪および第2の車輪と、第1の車輪および第2の車輪にトルクを伝達する駆動力源と、第1の車輪および第2の車輪にブレーキトルクを与える制動装置とを有し、第1の車輪と路面との間で生じる駆動トルクおよび第1の車輪に与えるブレーキトルクと、第2の車輪と路面との間で生じる駆動トルクおよび第2の車輪に与えるブレーキトルクとを、個別に変更できる駆動力制御装置において、スリップ量が大きい方の車輪で生じる駆動トルクの最大値と、スリップ量が小さい方の車輪の駆動トルクの最大値との差を求める算出手段(ステップS5,S6)と、駆動トルクの最大値同士の差に基づいて、スリップ量が大きい方の車輪に与えるブレーキトルクを制御するブレーキトルク制御手段(ステップS7,S8)とを備えている。
(もっと読む)
車両のスタック脱出装置
【課題】モータの反転を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出できる車両のスタック脱出装置を提供する。
【解決手段】後輪が路面の窪みにスタックしたときに、モータの正転と逆転とを交互に繰り返しながら、窪み内での後輪の往復ストロークを次第に増加させて脱出させるスタック脱出制御装置において、モータの正転または逆転の実行中に、従動輪の車輪速が停車判定値未満で、且つ後輪と前輪との車輪速差がスリップ判定値以上になったときにモータ反転条件の成立判定を下し(S8がYes)、モータの回転方向を反転する(S12)。
(もっと読む)
駆動力制御装置
【課題】 制御のハンチングを抑制することができる駆動力制御装置を提供すること。
【解決手段】 駆動輪にスリップが発生したときに、原動機の出力トルクを駆動輪のスリップを抑制するようにフィードバック制御をするフィードバック制御部と、駆動輪にスリップが発生したときに、発進摩擦要素の締結トルクを要求駆動トルクに応じてフィードフォワード制御をするフィードフォワード制御部と、を有する駆動力制御手段とを設けた。
(もっと読む)
車両の駆動力制御装置
【課題】駆動力特性の異なる複数の運転モードを有する車両において、運転モード毎に、運転者の要求するドライバビリティに応じた駆動力を得ることができるようにする。
【解決手段】路面摩擦係数μと各車輪の接地荷重Fziとに基づき、各車輪の標準摩擦円限界値Sμ_Fziを設定する(S4)。そして運転モードDmがノーマルモードDnのときは、
標準摩擦円限界値Sμ_Fziで摩擦円限界値μ_Fziを設定する(S7)。又運転モードDmがセーブモードDsのときは、標準摩擦円限界値Sμ_Fziを補正値αs(但し、0.5<αs<1.0)で補正して、縮小された摩擦円限界値μ_Fziを設定する(S8)。又運転モードDmがパワーモードDpのときは、標準摩擦円限界値Sμ_Fziを補正値αp(但し、1.0<αp<1.5)で補正して拡大された摩擦円限界値μ_Fziを設定する(S9)。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力制御装置において、制御遅れを抑制することで初期スリップを抑制して高精度なトラクション制御を可能とする。
【解決手段】エンジン12とモータ16,19の駆動トルクを制御するHV−ECU20と、ブレーキアクチュエータ38の制動トルクを制御するブレーキECU40と、モータ19の回転速度を検出する回転位置検出センサ35と、駆動輪28の回転速度を検出する車輪速センサ47とを設け、ブレーキECU40は、駆動輪28の回転速度に基づいてスリップを検出すると共に第1トルクダウン量を算出し、HV−ECU20に出力する一方、HV−ECU20は、モータ19の回転速度に基づいて駆動輪28のスリップを検出すると共に第2トルクダウン量を算出し、第1トルクダウン量と第2トルクダウン量に応じてモータ19の駆動トルクを制御する。
(もっと読む)
車両のパワーホップ検出方法、車両のパワーホップ緩和方法、車両制御方法及び車両
【課題】 本発明は、車両が損傷を受ける可能性のあるパワーホップ状態を検出し、さらにそのような場合に、パワーホップを軽減するなどの対処をすることを目的とする。
【解決手段】 車両101の前後加速度の現在と前回の信号を含む連続した複数の信号を取得し、連続した信号の周期と振幅を算出し、連続した信号のそれぞれの周期と振幅の組み合わせが第1所定値PH_Map1を上回るか否かを判定し、現在の信号の周期と振幅の組み合わせが、第1所定値PH_Map1よりも大きい第2所定値PH_Map2を上回るか否かを判定し、現在の信号の周期と振幅の組み合わせが第1所定値PH_Map1を上回り、かつ現在の信号の周期と振幅の組み合わせが第2所定値PH_Map2を上回るかどうかに基づいてパワーホップの状態を判断する。
(もっと読む)
車両の運動制御装置
【課題】車両が急激に不安定になってしまう事態を防止しつつ、車両の挙動を極力運転者の意図に沿ったものにする。
【解決手段】前後左右の各タイヤ1FL〜1RRのタイヤ力が目標タイヤ力となるように各タイヤへの横力fxiおよび前後力fyiが個々独立して変更制御される(i=各タイヤを区別する識別子)。タイヤ力検出センサ20で検出されたタイヤ力に基づいて、各タイヤの負荷率ηiが決定される。全てのタイヤが、負荷率ηiが所定値以上となる飽和タイヤである場合、その目標タイヤ力が減少される。運転者によるブレーキ操作状態やハンドル操作状態に応じて、減少させる横力と前後力との割合が変更される。
(もっと読む)
車両の駆動力制御装置
【課題】坂道等における登坂走行に支障を来すことなく、現在のみならず、今後生じると推定される過剰な駆動力を抑制し、タイヤのグリップ力を適切に維持して車両の走行安定性を向上させる。
【解決手段】駆動力制御装置1は、各輪の摩擦円限界値を演算し、各輪の要求タイヤ合力を演算し、各輪のタイヤ合力を演算し、各輪の要求オーバータイヤ力を演算し、各輪のオーバータイヤ力を演算し、オーバータイヤ力を演算してオーバートルクを演算し、制御量を演算する。そして、この制御量を、路面勾配に基づく第1の下限値を用いて下限処理し、また、路面勾配が取得できず第1の下限値が設定できない場合は、アクセル開度に基づく第2の下限値を用いて下限処理し、エンジン制御部2に出力する。
(もっと読む)
車両の駆動力制御装置
【課題】コーナリング時はもとより、発進、直進等のあらゆる走行場面において、的確に精度良く駆動力を制御して車両の安定性を向上させる。
【解決手段】駆動力制御装置1では、路面の摩擦円限界を推定し、該摩擦円限界に基づきトルクダウンさせる駆動力の制御量を第1の制御量TTCS1として演算する第1のトラクション制御部2と、少なくとも車輪のスリップ率に基づいてトルクダウンさせる駆動力の制御量を第2の制御量TTCS2として演算する第2のトラクション制御部3を有し、制御量設定部4は第1の制御量TTCS1と第2の制御量TTCS2とを比較して、その値の小さな方(トルクダウン量の大きな方)を駆動力制御装置1による制御量TTCSとして設定する。
(もっと読む)
自動車の走行性を調整する装置および方法
本発明は、車両、特に自動車の少なくとも一つの車輪の駆動を制御する装置であり、車輪を駆動させるエンジン(50)、エンジン制御手段(40)、車両の運転者が望む加速レベルに関する情報を供給する手段(62)、車両の加速レベルに関する情報を供給する手段(22)、および、種々の情報を受けるコンピューター手段(70)を有する電気制御手段でなる。コンピューター手段(70)は、車両の加速レベルを運転者が望む加速レベルに合うようにしている。この装置は、さらに車両の傾きの情報を供給する手段を有する。 (もっと読む)
車両運動制御装置
【課題】車輪のグリップ限界における制御特性の変化を穏やかなものとし、ドライバが違和感無く、車両を適切に制御して安定性の向上を図る。
【解決手段】スロットル弁制御装置1では、マップ設定部1aで、予め設定しておいたアクセル開度−スロットル開度のマップにおいて、路面μの値に応じて可変閾値εを定める。可変閾値εは、路面μが高い程、高い値に、路面μが低い程、低い値に設定される。アクセル開度は、可変閾値εより高い領域においては、アクセル開度に対するスロットル開度の変化量が、通常の変化量より低下させられて設定される。すなわち、路面μが高い場合には、通常の特性であっても十分安定性を確保して走行できるが、路面μが低い場合には、アクセル開度に対するスロットル開度の変化量を小さくして、ドライバのアクセル操作に対して十分な安定性を確保できるような特性へと変化させる。
(もっと読む)
車両駆動力装置
【課題】
低加速度でスリップするような場合においてもスリップを検出することが可能な車輪のスリップ検出手段を備えた車両駆動力装置を提供することにある。
【解決手段】
微分器141は、後輪の加速度を算出する。加速度閾値算出手段144は、車両の状態に応じて、スリップ判定用加速度閾値を可変とする。加速度スリップ検出器145は、微分器141によって求められた車輪の加速度と、加速度閾値算出手段144によって可変されるスリップ判定用の加速度閾値とを比較してスリップと判定する。
(もっと読む)
車両の駆動力配分制御装置
【課題】 操舵操作を伴う旋回時、高い応答性によりコーナリングフォースの限界を予測し、応答良く運転者へ車両挙動の限界が近いことを知らせることができる車両の駆動力配分制御装置を提供すること。
【解決手段】 前後輪のうち一方を主駆動輪とし他方を副駆動輪とし、前後輪の駆動力配分を制御する駆動力配分制御手段を備えた車両において、運転者の操舵操作量を検出する操舵操作量検出手段(操舵角センサ7)と、前輪タイヤの横滑り角によるコーナリングフォース限界に近い領域の操舵操作量限界判定値を設定する操舵操作量限界判定値設定手段(ステップS2)と、設け、前記駆動力配分制御手段は、運転者の操舵操作量が操舵操作量限界判定値を上回ると、前記副駆動輪へ伝達される駆動力をステップ的に変動させるフィードフォワード制御を行う手段とした。
(もっと読む)
車両用制御装置
【課題】 本発明は、車両挙動制御や警報制御などのような安全制御システムの作動可否を、ユーザの選択によりオン/オフ切替可能としつつ、かかる安全制御システムの有用性を適切に発揮させることができる車両用制御装置の提供を目的とする。
【解決手段】 本発明による車両用制御装置は、安全走行の観点から運転者の運転態様を評価する運転態様評価手段16,46と、所定の場合に安全走行に関連する各種制御を行う安全制御手段14,44と、安全制御手段が作動可能な状態と作動不能な状態とを、ユーザからの切替要求に応じて切り替える切替手段30,50とを備え、運転態様評価手段による運転態様の評価結果に基づいて、安全制御手段の作動可能な状態を強制的に形成することを特徴とする。
(もっと読む)
1 - 20 / 30
[ Back to top ]