
Fターム[3D041AA37]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351) | 低速走行安定性向上 (60)
Fターム[3D041AA37]の下位に属するFターム
インチング性向上 (8)
Fターム[3D041AA37]に分類される特許
1 - 20 / 52
車両用駆動力制御装置
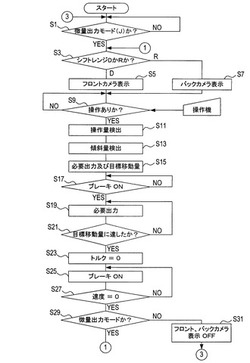
【課題】 走行用駆動源の出力を微量とした状態で車両を移動させるための車両用駆動力制御装置を提供する。
【解決手段】 微量出力モードが選択されていると判定され、かつ、ブレーキペダルが操作されたと判定されたときに、車両を移動させるために必要とする出力(必要出力)を決定し、エンジンの出力が必要出力となるようにエンジンを自動制御する微量出力モードを実行するので、エンジンの出力を微量とした状態で車両を移動させることができる。
(もっと読む)
作業車両

【課題】重負荷時には、エンジン回転数を低下させ、車速を低下させることにより、エンストを防止することができ、軽負荷時には、エンジン回転数の上昇を抑制して低燃費で走行することができる作業車両を提供する。
【解決手段】エンジン負荷率Lが、設定した重負荷値L1よりも大きくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを増加させ、エンジン回転数Nrがエンジン回転数上限値Nmaxまで増加した後、エンジン負荷率Lが、設定した重負荷値L2よりも大きくなった場合、車速Vを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する重負荷モードと、エンジン負荷率Lが設定した軽負荷値L4よりも小さくなった場合、車速Vを一定に維持しながらエンジン回転数Nrを減少させるように、エンジン回転数変更アクチュエータ93と変速アクチュエータ91とを制御する軽負荷モードと、を備える。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、クラッチ出力軸36と、エンジンクラッチ35と、電動モータ22と、後車輪21と、差動装置23と、制御部と、を備える。クラッチ出力軸36は、エンジン2の駆動力を伝達する。エンジンクラッチ35は、エンジン2とクラッチ出力軸36との間に配置される。差動装置23は、クラッチ出力軸36からの出力と前記電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度及びエンジンクラッチ35の作動を制御する。そして、機体の前進時において、制御部は、クラッチ出力軸36からの出力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
車両の駆動力制御装置
【課題】低負荷時に求められる車速変動に対し駆動力段差の無いスムーズさと高負荷時に求められる変速に伴って駆動力が変化するリズム感を併せて実現することができる車両の駆動力制御装置を提供すること。
【解決手段】トルク制御可能なエンジンEng、モータ/ジェネレータMGと、変速比を有限な段数で制御可能な自動変速機ATの組み合わせにより左右後輪RL,RRに伝達する駆動力を制御する。このFRハイブリッド車両の駆動力制御装置において、要求駆動力を示す負荷を検出するアクセル開度センサ16を設ける。そして、駆動力制御手段(図6)は、アクセル開度と車速に応じてタイヤの駆動力の目標値を割り付ける「駆動力デマンド制御」と、アクセル開度と動力源の回転速度に応じて動力源の出力軸トルクの目標値を割り付ける「トルクデマンド制御」を、検出された負荷に応じて切り替える。
(もっと読む)
姿勢安定化制御装置及び車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とすることである。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
車両のバネ上制振制御装置
【課題】適切な条件下でバネ上制振制御を介入させること。
【解決手段】路面からの入力又は運転者要求トルクに伴い車体に発生するバネ上振動を抑制させる為のバネ上制振制御量の設定を行うバネ上制振制御手段(バネ上制振制御部3)と、そのバネ上制振制御量を実現させるように車両駆動装置(エンジン20や変速機30)の出力を制御してバネ上制振制御を実行する駆動制御手段(駆動制御部2)と、を備えた車両のバネ上制振制御装置において、車両10の運転状態、車両10の状態又は運転者要求の内の少なくとも何れか1つに応じて、バネ上制振制御の実行を許可又は禁止すること。
(もっと読む)
車両の制御装置
【課題】排気浄化装置の浄化能力を回復させる回復制御を行う車両において、クロール制御を安定して行うことができる車両の制御装置を提供する。
【解決手段】車両は、ディーゼルエンジンの排気の浄化を行う触媒コンバータ及びPMフィルタを含む排気浄化装置が設けられる。排気浄化装置における浄化能力を回復させる回復制御に相当するPM再生制御及びS被毒回復制御が電子制御装置により行われる。また、電子制御装置により車両の速度を所定の低速領域に維持するクロール制御が実行される。クロール制御が実行される際に回復制御の実行を禁止する回復制御禁止判定処理が電子制御装置により実行される。
(もっと読む)
内燃機関の制御装置
【課題】過渡減速時に、EGR過剰に起因するドライバビリティの悪化や燃焼悪化などを適切に抑制することが可能な内燃機関の制御装置を提供する。
【解決手段】内燃機関の制御装置は、EGR装置を有する内燃機関に対して制御を行うために好適に利用される。具体的には、制御手段は、排気ガスの還流中に内燃機関の回転数及び負荷を減少させる要求があった際において、EGR率が所定値以上である場合に、EGR率が当該所定値未満となるまで、定常時よりも吸入空気量を増加させる制御を行う。これにより、過渡減速時のEGRガスの減少側への制御遅れがあっても、一時的なEGR量の増加を適切に抑制することができる。よって、EGR過剰に起因するドライバビリティの悪化や燃焼悪化を効果的に抑制することが可能となる。
(もっと読む)
車両の制御装置
【課題】第2電動機からの動力を有段式の自動変速機を介して駆動輪(車軸)に出力する車両において、ダウンシフト変速中のショック発生及び自動変速機の摩擦材熱負荷の増大を抑制する。
【解決手段】シーケンシャルモードで高車速走行している場合に、第2モータジェネレータMG2の熱負荷(発熱)を抑制するために高車速ダウンシフト変速線が選択されたときには、シーケンシャルシフト変速線をエンジン回転数を下げる側に変更することで、ダウンシフト変速中に第1モータジェネレータMG1による保護制御(エンジンオーバラン防止制御)が作動しないようにする。これによって、ダウンシフト変速中に第2電動機のトルクダウンを実施して第2電動機のモータの吹きを抑制することができ、変速ショックの低減及び摩擦係合要素の摩擦材の保護が可能になる。
(もっと読む)
車両走行制御装置
【課題】制動力増量制御開始時の制動力増量制御による違和感を軽減させること。
【解決手段】エンジン100の駆動力を車両の目標駆動力に基づいて制御するエンジンECU9と、ブレーキ装置200における各車輪の制動力を車両の目標制動力に基づいて制御するブレーキECU10と、自動走行制御時におけるエンジン100の目標駆動力とブレーキ装置200の目標制動力の設定を夫々行う駆動力設定部83と制動力設定部84を有し、エンジン100の目標駆動力の情報をエンジンECU9へと出力するとともにブレーキ装置200の目標制動力の情報をブレーキECU10へと出力する自動走行制御ECU8と、を備え、自動走行制御時に車両に働く総車両前後方向作用力を演算する総車両前後方向作用力算出部85を自動走行制御ECU8に設け、制動力設定部84は、総車両前後方向作用力が大きいほど制動力増量制御開始時の車両の目標制動力を大きく設定する。
(もっと読む)
車両の走行制御装置
【課題】自車両の設定車速を走行環境に適した車速に変更することができる車両の走行制御装置を提供する。
【解決手段】車両の走行制御装置1は、ECU2と、対向車両の車速を検出するレーダセンサ3とを備えている。ECU2は、レーダセンサ3によって検出された対向車両の車速に基づいて、自車両の設定車速を決定し、その設定車速に応じてエンジン・AT制御ECU6及びブレーキ制御ECU7を制御することで車両の駆動・制動制御を行う。
(もっと読む)
車両制御装置
【課題】車両の後部背面からエスコートする感覚で車両の走行を操作できるようにする。
【解決手段】車両本体2の左右方向に複数の感圧センサ24bが配置されるように車両本体2の後部背面に取り付けられ、複数の感圧センサ24bにより車両本体2の左右方向に対する操作者の操作位置を検出するエスコート操作部20を備え、このエスコート操作部20により検出された操作者の操作位置に応じて車両の走行動作を決定し、この車両の走行動作に応じて車輪6の回転および車輪6の舵角を制御する。
(もっと読む)
車両制御装置
【課題】車両制御にあたり低速での定速走行制御時でも車体速度を精度よく推定する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR、41FL、41RR、及び41RL)と、特定される車輪速度に基づいて、各車輪に係る車輪速度有効速度を夫々演算する演算手段(51)とを備える。そして、各車輪について演算される車輪速度有効速度(VWV)が、目標車速よりも低い所定速度閾値(KV)を下回るか否かに応じて、各車輪について特定される車輪速度が有効であるか否かを判定する判定手段(51)と、この判定手段により車輪速度が有効であると判定される車輪の車輪速度に基づいて、当該車両の車体速度を推定する推定手段(51)を更に備える。
(もっと読む)
車両走行制御装置
【課題】自動走行制御中に運転者が加速操作又は減速操作した際に車両を運転者の意図に沿って加速又は減速させること。
【解決手段】エンジン100を駆動目標制御量に基づいて制御する第1ECU(エンジンECU9)と、ブレーキ装置200を制動目標制御量に基づいて制御する第2ECU(ブレーキECU10)と、車両の車速が目標車速となるように車両走行制御を行う際の駆動目標制御量及び/又は制動目標制御量を算出して当該駆動目標制御量を第1ECUへと出力するとともに当該制動目標制御量を第2ECUへと出力する第3ECU(自動走行制御ECU8)と、を備え、その第3ECUは、車両走行制御中に運転者による加速操作を検知した際、ブレーキ装置200における車両走行制御用の制動力による目標車速を現在の車両の車速よりも高速側にするよう構成すること。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、車両の走行状態に拘らず駆動力配分機構への過渡的な荷重入力を回避して耐久性の低下を図る。
【解決手段】車両の駆動輪17L,17Rに駆動力を付与するエンジン11と、この駆動力を左右の駆動輪17L,17Rへの配分を行う制御デフ15と、左右の駆動輪17L,17Rに対して独立して制動力を付与する電子制御式ブレーキ装置18とを設け、ECU31は、車両の運転状態に応じてエンジン11と制御デフ15と電子制御式ブレーキ装置18を制御可能に構成し、このECU31は、電子制御式ブレーキ装置18が作動するときに制御デフ15の作動を中止する。
(もっと読む)
車両の挙動制御装置
【課題】制御量に対する制御指標の不感帯を適正なものとし、車両の挙動制御の向上を図った車両の挙動制御装置を提供する。
【解決手段】目標挙動設定手段により設定された目標挙動γtと挙動検出手段により検出された実挙動γrとの偏差の相関値Δγが制御指標とされ、挙動制御手段により挙動調整機構は該制御指標に応じて求めた制御量TR/Dに基づき制御されるが、該挙動制御手段は、制御指標の0値近傍に不感帯を有しており、該不感帯の所定幅|γDZ|を、車速VBが第1所定値V1未満の低車速域では該第1所定値V1以上第2所定値V2未満の中車速域よりも広く設定するとともに、車速VBが第2所定値V2以上の高車速域でも上記中車速域よりも広く設定する。
(もっと読む)
車輌の制動装置
【課題】ブレーキペダルの操作感の悪化を防ぐことこと
【解決手段】車輪駆動力又は回生車輪制動力を発生させる電動機30が配備された車輌の制動装置において、運転者によるブレーキペダル63への操作圧力が伝わって発生した作動流体の圧力をそのまま又は増減して夫々の車輪10FL,10FR,10RL,10RRへと伝達させることで機械車輪制動力を発生させる作動流体圧力調節部(ブレーキアクチュエータ67)を備えた機械車輌制動力発生手段と、電動機30による回生車輌制動力及び機械車輌制動力発生手段による機械車輌制動力以外の外的制動力を車輌に働かせる外的制動力発生手段(走行抵抗発生手段90)と、電動機30の電気エネルギへの変換効率の低下時に運転者の要求車輌制動力を満たすべく当該低下分に相当する制動力を外的制動力で補填させる制動制御手段(総合ECU70,走行抵抗可変ECU91)と、を備えること。
(もっと読む)
車両の制御装置
【課題】運転者の意図に応じた微速後退を行うことが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、アクセル開度検出手段と、傾斜角度検出手段と、速度検出手段と、要求駆動力算出手段と、走行抵抗算出手段と、制御手段と、を備える。要求駆動力算出手段は、アクセル開度から、運転者の要求駆動力を算出する。走行抵抗算出手段は、路面の傾斜角度から、走行抵抗を算出する。制御手段は、車両の速度が所定範囲以内であり、要求駆動力が、走行抵抗算出手段より得られた走行抵抗以下となる場合に、要求駆動力と走行抵抗とに基づいて、ブレーキによる制動力と電動機による駆動力とを車両に発生させる。このようにすることで、インバータの特定のスイッチング素子が熱破壊するのを防ぐことができると共に、運転者の意図に応じた微速後退をスムーズに行うことができる。
(もっと読む)
1 - 20 / 52
[ Back to top ]