
Fターム[3D041AA42]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 駐停車性の向上 (98)
Fターム[3D041AA42]の下位に属するFターム
Fターム[3D041AA42]に分類される特許
1 - 20 / 37
パーキングロック装置
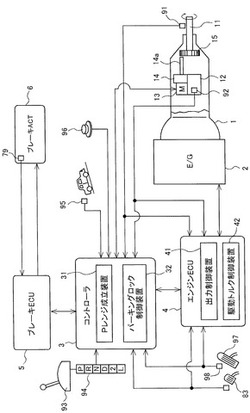
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
車両制御装置

【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
走行制御装置
【課題】車両の搭乗者に与える不快感を軽減できる走行経路を生成する走行制御装置を提供すること。
【解決手段】走行制御装置100では、仮の走行経路の生成を試みる場合に、生成予定の仮の走行経路について操舵量累積値STを算出する。そして、算出した操舵量累積値STが操舵量累積積閾値Aを超えていれば、車両1が蛇行するなどの走行経路が生成されるおそれがあり、搭乗者に不快感を与えるおそれがあるため、別の仮の走行経路の生成を試みる。一方、算出した操舵量累積値STが操舵量累積積閾値A以下であり、目標とする駐車位置に到着可能であれば、その仮の走行経路を用いて、走行経路全体を生成する。これにより、走行経路が生成される場合には、車両1の操舵角の変化が抑制される走行経路を生成できるので、搭乗者に与える不快感を軽減できる走行経路を生成できる。
(もっと読む)
走行制御装置
【課題】車両を基準位置から目標位置まで走行させる走行経路を生成する場合に、より好適な走行経路を生成できる走行制御装置を提供すること。
【解決手段】走行制御装置では、経路パターンを組み合わせて、仮の走行経路を生成するが、仮の走行経路の生成を開始する場合には、車両の現在の車両位置と、目標とする駐車位置によって決まる位置と、車両の車両方位との3つの条件に基づいて、又は、車両の現在の操舵角に基づいて、10の経路パターンに優先順位を設定する。そして、優先順位の高いものから順に、まず、1個の経路パターンで仮の走行経路を生成する。この優先順位は、走行経路を生成する場合に、3つの条件に対して相応しい走行経路を生成するためのものなので、仮の走行経路を生成する場合に、3つの条件に対して相応しい仮の走行経路を生成できる。よって、より好適な走行経路を生成できる。
(もっと読む)
走行制御装置
【課題】予め用意しておく走行経路パターンの数を抑制しつつ、車両を基準位置から目標位置まで走行させる走行経路を生成する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100では、経路パターンPT1〜PT10を用いて仮の走行経路RT1を生成し、その仮の走行経路RT1ついて駐車可能条件が成立しない場合、その仮の走行経路RT1の終端から10通りの方向に走行経路を延長するように、10通りの新たな仮の走行経路RT1を一つずつ順番に生成していく。よって、経路パターンの種類が多くなくても、生成する仮の走行経路RT1の数を増やすことができ、駐車可能条件が成立する可能性を高めることができる。従って、予め用意しておく経路パターンPT1〜PT10の数を抑制しつつ、走行経路RT1〜RT3が生成される可能性を向上させることができる。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両制御装置
【課題】運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止する。
【解決手段】制御部4が、車両1よりも障害物側に設定された目標停止位置まで後退して停止する後退制御処理を、車両1から障害物までの距離が最終目標停止距離以下となるまで繰り返し実行することにより、障害物に対し車両1を段階的に後退させる。これにより、従来の車両制御装置のように、運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止できる。
(もっと読む)
車両挙動制御装置
【課題】 複数のデバイスの協調制御に要する処理時間の短縮やデバイスの失陥時における対応の容易化等を実現した車両挙動制御装置を提供する。
【解決手段】 車輪運動制御装置40は、ステップS7で、着力点ηが前軸位置(前輪3fの位置)Lfより大きいか否かを判定する。この判定がYesであった場合、車輪運動制御装置40は、ステップS8で、着力点ηを前軸位置Lfとする(η=Lf)とともに、制動モーメントMbを算出する(Mb=(η−Lf)・F)。車輪運動制御装置40は、ステップS12で、仮想横力Fの操舵制御分を2輪モデルの前後輪3f,3rに分配すべく、前輪横力合計値Ffyと後輪横力合計値Fryとを算出する。車輪運動制御装置40は、ステップS14で、制動モーメントMbを左右輪3l,3rに分配すべく、左輪前後力合計値Flxと右輪前後力合計値Frxとを算出する。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
駐車支援装置
【課題】良好な駐車精度を保ちながら効率よく駐車動作を完了できる駐車支援装置を提供することを目的とする。
【解決手段】駐車支援装置1は、駐車目標位置に車両2を移動するための駐車経路40において運転者による操舵を必要とする場合に、運転者が前記操舵をする際に速度調節手段107により車両2の速度調節を行う。該速度調節は、前記操舵が行われる際に駐車経路40に略一致した状態を保持して車両2を走行させる目的で行われる。
(もっと読む)
駐車支援装置、駐車支援方法及びコンピュータプログラム
【課題】駐車の困難な駐車スペースに対して駐車を行う場合であっても容易且つ安全に駐車を行わせることを可能とした駐車支援装置、駐車支援方法及びコンピュータプログラムを提供する。
【解決手段】障害物センサ5A,5Bにより自車周囲にある駐車スペースを検出し(S1)、検出された駐車スペースに対して所定旋回舵角で駐車を行う第1走行経路を算出し(S11〜S15)、更に車両を駐車スペースに対して進入させることが可能な範囲で第1走行経路の舵角を緩和した第2走行経路を算出し(S22〜S27)し、算出した第2走行経路に従って駐車の支援を行う(S5)ように構成する。
(もっと読む)
タイヤ位置可変車両およびタイヤ力変化抑制方法
【課題】 タイヤ移動に伴うタイヤ発生力の変動を抑制し、運転者の運転操作に応じた車両挙動を実現できるタイヤ位置可変車両およびタイヤ力変化抑制方法を提供する。
【解決手段】 タイヤユニット300を移動させる際、タイヤ390の移動に伴う車両挙動変化を抑制するように、転舵アクチュエータ340を制御するタイヤ力変化抑制装置510を備える。
(もっと読む)
車両制御装置
【課題】信号情報を利用して車両を制動制御する車両制御装置において、制動制御時における先行車両と自車両との急接近を防止しドライバに不安感を与えるおそれを低減することが可能な車両制御装置を提供する。
【解決手段】信号情報を利用して自車両Mを停止させる制動制御を行う車両制御装置1である。この車両用制御装置1は、自車両Mの先行車両Nを検出する先行車両検出部12と、先行車両Nが前方の交差点に進入する進入時の車両用信号機SVの表示を推定する信号表示推定部13と、その車両用信号機SVの表示が停止信号を示すと推定される場合に、自車両Mの加速を制限する加速制限部14と、を備える。
(もっと読む)
駐車支援装置
【課題】精度良く、且つ短時間で駐車の目標位置及び駐車のための経路を設定して、駐車の際の乗員の運転負荷を軽減できる駐車支援装置を提供する。
【解決手段】駐車支援装置は、後退開始位置P1まで前進し、後退開始位置P1から後進して、所定の駐車位置Eへ車両30を駐車させる運転操作を、以下のように支援する。駐車目標設定部は、車両30の周辺の情景が撮影された画像データに基づいて検出された駐車基準W1、W2に基づいて、所定の駐車位置Eに対応する駐車目標位置P4を設定する。駐車経路演算部は、前進経路KFを前進中に、車両30の現在位置から駐車目標位置P4への駐車経路KBを逐次演算する。駐車経路判定部は、駐車経路演算部の演算結果に基づいて、駐車経路KBが成立したか否かを判定する。
(もっと読む)
車両用ブレーキ装置
【課題】液圧発生手段および車輪ブレーキ間に介設される常開型電磁弁を含む液圧制御手段と、液圧保持条件の成立時に常開型電磁弁を閉弁するようにして液圧制御手段の作動を制御するコントローラとを備え、乗員の操作によって駐車ブレーキ状態を得ることを可能とした車両用ブレーキ装置において、車輪ブレーキの液圧保持状態で、液圧保持状態を解除する解除指令が乗員の誤操作によって出されたときに、駐車ブレーキ操作を乗員により確実に促すようにする。
【解決手段】コントローラ20は、解除指令出力手段41からの解除指令出力時に、乗員の操作による駐車ブレーキ状態が得られていないことを検出した際には、所定時間または所定距離だけ動力源による駆動力または路面傾斜による自重の重力加速度成分によって車両を移動させるようにして液圧制御手段5の作動を制御する。
(もっと読む)
車両走行支援装置
【課題】本発明は、運転者からの指示がある場合に限りトルクアップが実現される利便性の高い車両走行支援装置の提供を目的とする。
【解決手段】本発明は、車両の走行時の車輪の駆動トルクを変化させて車両の走行を支援する車両走行支援装置10において、前記駆動トルクを増加させるトルクアップ手段36,38と、前記トルクアップ手段の作動が許容される第1の状態と、前記トルクアップ手段の作動が抑制される第2の状態とを、車両乗員からの入力に応じて切り替える切替手段12とを備えることを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車支援制御の際に段差をよりスムーズに乗り越えることが可能な駐車支援装置を提供すること。
【解決手段】駆動力出力手段(80)が出力する駆動力により、設定された目標駐車位置に車両を誘導する駐車支援装置(1)であって、車両の運動データを計測する運動データ計測手段(30、40、50、60)と、運動データ計測手段により計測された車両の運動データに基づき路面に段差が存在するか否かを判定し、段差が存在すると判定した場合には、運動データ計測手段により計測された車両の運動データに基づいて付加駆動力を導出し、段差が存在しないと判定した場合に駆動力出力手段から出力される基本駆動力に加えて、導出した付加駆動力を出力するように駆動力出力手段を制御する制御手段(90)と、を備えることを特徴とする。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】車両をユーザの所望の位置に自動的に駐車させることができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に搭載された駐車支援システム1の制御装置2において、車両に設けられ、車外にいるユーザを撮影する前方カメラ30及び後方カメラ31から画像データG1,G2を取得する画像データ入力部19と、取得した画像データG1,G2に基づき、ユーザが指示する車両の移動量又は方向を判断し、ユーザにより指示された移動量又は方向に基づき、車両を自動制御する駐車制御処理部15とを備えた。
(もっと読む)
1 - 20 / 37
[ Back to top ]