
Fターム[3D041AC10]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | クラッチ (535) | 電磁式、電磁粉式 (17)
Fターム[3D041AC10]に分類される特許
1 - 17 / 17
車両挙動制御装置
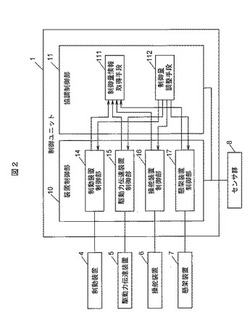
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
ハイブリッド車の制御装置

【課題】ハイブリッド車の制御装置に関し、エンジン走行中にエンジンの出力が過剰になったらエンジンの不要な吹け上がりやこれによるエンジンのオーバーランを防止しながらクラッチを開放することができるようにする。
【解決手段】電動モータ1及びエンジン2を走行用駆動源として備えたハイブリッド車の制御装置において、エンジン2からの駆動力を車両の駆動輪に伝達可能とする動力断接クラッチ4と、エンジン2に接続された発電機3と、エンジンの状態量を検出する状態量検出手段74と、車両の状態に基づいてエンジンから出力されるべき目標状態量を算出する目標状態量算出手段75と、動力断接クラッチ4が接続されてエンジンの駆動力により車両が走行している際に状態量と目標状態量との差が所定量以上となると、発電機3でエンジンの回転数を抑制し、エンジンの回転数抑制が始まった後に動力断接クラッチ4を開放させる制御手段7とをそなえる。
(もっと読む)
動力伝達装置
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
ギアシフトの間にエンジントルクを制御する方法
【課題】最も円滑なギアシフトを実現にするために、変速装置と連動する必要条件が、ドライバによって課せられる必要条件に優先することを可能にすること。
【解決手段】自動式ギア比シフトを有するギヤボックスを備えている自動車に関し、コントロールユニット20が、アクセルペダル24から来るトルク要求情報を基礎としてエンジン運転モード10を制御し、そして、エンジン制御は、ギアボックス16のコントロールユニット22によって伝達されるデータを基礎として修正されることが可能である。自動車の特定の作動位相に対して、ギアボックス16コントロールユニット22は、コントロールユニット20が従属されるエンジン制御コマンドを置き換えるトルク要求情報の作動を禁止する。
(もっと読む)
変速制御装置およびそれを備えた自動二輪車
【課題】手動モード運転と自動モード運転とを切換可能な自動二輪車において、リンプホーム性を向上させる。
【解決手段】変速制御装置50は、有段のドグクラッチ式のシフト機構43と、シフト機構43のギアポジションを変更するシフトアクチュエータ70と、クラッチ44と、クラッチアクチュエータ60と、運転者によって操作され、シフトアクチュエータ70およびクラッチアクチュエータ60によるシフト機構43のギアポジションの変更を指示するシフトスイッチ72と、運転者によって操作され、手動モード運転と自動モード運転とを切り換えるモード切換スイッチ71と、ECU90とを備えている。ECU90は、所定の故障時に、自動モード運転を規制しかつ手動モード運転を許可する運転許可部93を有している。
(もっと読む)
ハイブリッド車両
【課題】電気モータのロータが入力軸に係合する変速機構において、当該入力軸に対応するクラッチを係合状態にしたまま、変速段を切替える動作を行うことが可能なハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、第2変速機構40において現在、係合状態にある変速段である現変速段から、第2変速機構40において新たに係合状態にする変速段である新変速段に切替える場合、機関出力軸8から第2入力軸28に伝達されたトルクを打ち消すよう、電気モータ50により当該トルクとは逆向きのトルクを第2入力軸28に作用させて、第2変速機構40において現変速段を解放状態にする解放動作を行わせ、その後、第2入力軸28の回転速度が、車速と新変速段に基づいて設定された目標回転速度となるよう、内燃機関5及び電気モータ50を協調して作動させて、解放状態にある新変速段を係合状態にする係合動作を行わせる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の加速応答性を確保することができると共に、ドライバーのアクセル操作に対するドライバビリティを向上できるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータジェネレータMGと第1クラッチCL1と第2クラッチCL2を介装した駆動系を備えたFRハイブリッド車両である。「EVモード」のとき、加速要求があるとエンジンEngをモータジェネレータMGにより始動するエンジン始動要求を出し、「HEVモード」に遷移するモード遷移制御手段(図4)は、エンジン始動要求があると第2クラッチCL2をスリップ締結し、第2クラッチCL2のスリップ判定中から第1クラッチCL1を締結してエンジンEngの始動を開始し、エンジンEngが完爆した後に第1クラッチCL1をロックアップ締結すると共に、第2クラッチCL2をエンジンEngの完爆前から目標駆動力相当となるようにトルク容量制御を行う。
(もっと読む)
車両用ヨー・レイト制御装置
【課題】運転者の違和感が無いか少なく、車両旋回特性として十分なヨー・レイト制御を可能とする。
【解決手段】車の走行状態を検出する走行状態検出部85と、走行状態に応じて自車の目標ヨー・レイトを設定する目標ヨー・レイト設定部79と、自車のヨー・レイトを変更可能なヨー・レイト変更部19,21と、目標ヨー・レイトを実現するようにヨー・レイト変更部19,21を制御して旋回方向外側の駆動輪27又は駆動輪29にヨー・レイトを変更するためのベクトリング・トルクを付加調整するヨー・レイト制御部77とを備えた車両用ヨー・レイト制御装置であって、自車の姿勢を判断する車両姿勢判断部81と、判断された自車の姿勢に応じてベクトリング・トルクを補正する補正部85とを備えたことを特徴とする。
(もっと読む)
パラレルハイブリッドパワートレーン
【課題】搭載される車両等の静粛性をより向上させることのできるパラレルハイブリッドパワートレーンを提供する。
【解決手段】本発明のパラレルハイブリッドパワートレーンは、クランク軸1aを回転させる内燃機関1と、クランク軸1aと同一軸上に配置された回転軸2aを回転させる発電電動機2と、クランク軸1aと回転軸2aとの間に設けられ、両者を切断又は接続する電磁クラッチ3と、内燃機関1、発電電動機2及び電磁クラッチ3を制御する制御手段とを備えている。制御手段は、クランク軸1aのクランク角αを検出するクランク角センサ7と、回転軸2aの回転角βを検出するレゾルバ8と、コントローラ9とを有している。コントローラ9はクランク角αと回転角βとが所定位相になるようにクランク軸1aと回転軸2aとを接続するマイコン20を有している。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 制動力配分制御電子制御ユニットに大幅な改修を施すことなく、駆動力配分制御電子制御ユニットとの協調制御を可能にして車両のヨーモーメント制御装置のコストダウンを図る。
【解決手段】 駆動力配分制御電子制御ユニットUdのVSA規範車両逆モデルM7が車速Vおよびヨーレートγから仮想操舵角δ′を算出し、目標駆動力配分量に対する実駆動力配分量の偏差が小さくて制動力配分装置を作動させる必要がないときには、入力操舵角確定部M9が制動力配分制御電子制御ユニットUbへの入力操舵角δ* として前記仮想操舵角δ′を出力する。これにより、駆動力配分装置を優先的に作動させて制動力配分装置の作動量を最小限に抑え、制動力配分装置の作動に伴う車両の減速を防止しながら、既存の制動力配分制御電子制御ユニットUbを設計変更することなくそのまま使用してコストダウンに寄与することができる。
(もっと読む)
動力出力装置、それを備えたハイブリッド自動車、および動力出力装置の制御方法
【課題】電動機により出力された動力を変速伝達手段により変速して駆動軸に伝達している際に要求される動力を駆動軸により適正に出力しながら内燃機関を始動させる。
【解決手段】ハイブリッド自動車20において、クラッチC0を解放状態としてエンジン22を停止させ、モータMG1,MG2の双方を駆動軸67に連結すると共にモータMG1,MG2の少なくとも何れか一方に動力を出力させているときにエンジン22を始動させる場合、モータMG1およびMG2間で動力を移換し、変速機60によるモータMG1,MG2の一方と駆動軸67との連結を解除し、駆動軸67との連結が解除されたモータMG1,MG2の一方の回転数を駆動源要素接続が可能となるように調整し、クラッチC0を繋ぐと共にモータMG1またはMG2によりエンジン22をクランキングする。
(もっと読む)
自動変速制御装置および車両
【課題】乗車フィーリングを向上させることが可能な自動変速制御装置を提供する。
【解決手段】車両の走行中にシフトチェンジ操作があると、最初にシフトアクチュエータを駆動してギアチェンジを開始させる。また、ギアチェンジの開始と同時にエンジン駆動力を低減させる処理(点火遅角処理、噴射量減量処理、または空気量減量処理)を行う。ギアチェンジの開始後、所定時間が経過した後に、クラッチアクチュエータを駆動してクラッチの切断を開始する。
(もっと読む)
直結スタートを支援する分離クラッチを備えたハイブリッド駆動部
本発明は、内燃機関(14)と少なくとも1つの電気駆動部(18)を備え、前記電気駆動部(18)に少なくとも1つのトラクション用バッテリー(20)が割り当てられている車両におけるハイブリッド駆動部の作動方法並びにパラレルハイブリッド駆動部に関している。本発明では前記内燃機関(14)が、スターター支援なしの直結スタートによってハイブリッド駆動部(10)の"純粋な電気的走行作動モード"からスタート可能である。  (もっと読む)
(もっと読む)
ハイブリッド電気自動車の駆動制御装置
【課題】ハイブリッド電気自動車における変速制御を速やかに、かつ、応答良く行う。
【解決手段】エンジンとモータの駆動軸相互を連結し、モータの駆動軸を、電子制御される有段変速機の入力軸に連結し、変速機の出力軸を車両駆動軸に連結したハイブリッド電気自動車において、変速要求があったときに、エンジンの回転速度を、前記モータの回転速度に追随させる制御を開始し、モータの回転速度を、変速前の回転速度に維持して変速機の出力軸回転速度に追随させる制御を開始し、変速機の変速制御を開始し、モータの回転速度を、変速後における変速機の入力軸回転速度に同期させ、エンジンを変速後の要求出力に制御し、モータを変速後の要求出力に制御するというシーケンスで、エンジン、モータおよび変速機を制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両に要求される要求駆動力への追従性を良くしたハイブリッド車両の制御装置を提供する。
【解決手段】エンジン1とモータ3との間にクラッチ2を設け、エンジン1とモータ3から供給される駆動力によって駆動する前輪6と、モータ7から供給される後輪10とからなる四輪駆動のハイブリッド車両の制御装置において、予測路面摩擦係数μaに基づいて後輪10の最大駆動力を算出し、要求駆動力と後輪10の最大駆動力から前輪6の駆動力を算出し、前輪6の駆動力をモータ3で実現できない場合にクラッチ2に締結判断を行う。そして、要求駆動力を配分する場合にクラッチ2に締結判断に基づいて要求駆動力を配分し、エンジン1、クラッチ2、モータ3、7を制御する。
(もっと読む)
ハイブリッド車のモード遷移制御装置
【課題】 ハイブリッド車モードから電気自動車モードへのモード遷移時、燃費性能の向上と再加速応答性の向上との両立を図ることができるハイブリッド車のモード遷移制御装置を提供すること。
【解決手段】 エンジンEと少なくとも1つのモータを動力源とし、該動力源とタイヤへの出力部材が連結される差動装置を有する駆動力合成変速機TMと、車両状態に応じて前記エンジンEとモータを用いるハイブリッド車モードからモータのみを用いる電気自動車モードへのモード遷移を行うモード遷移制御手段と、を備えたハイブリッド車において、前記エンジンEと前記差動装置のエンジン入力部材との間にエンジンクラッチECを設け、前記モード遷移制御手段は、ハイブリッド車モードから電気自動車モードへのモード遷移時、前記エンジンクラッチECを切り離してエンジンEを停止させる第1のパターンと、前記エンジンクラッチECを切り離してエンジンEをアイドル回転のままとする第2のパターンと、を有する手段とした。
(もっと読む)
車両用駆動力制御装置
【課題】 電動モータの出力を従駆動輪に伝達するための伝達路に介挿された電磁クラッチを締結する際に、電動モータのモータ軸に生じるトルク変動を低減する。
【解決手段】 スリップが生じたときに電動モータ3を最大トルクで駆動する。このとき、スリップ発生時の後輪速度を予測し、この後輪速度を電動モータ3の回転数相当に変換した後輪速相当値よりも大きな値を目標回転数Vm*とし、電動モータ3をこの目標回転数Vm*まで上昇させた後、電動モータ3への電圧供給を停止しフリーラン状態とする。フリクション等により低下する電動モータ3の回転数と、実際の後輪速相当値とが同等となったとき、電磁クラッチ10を締結させる。フリーラン状態の電動モータ3にはトルクが発生していないから、この状態で電磁クラッチ10を締結させることにより電動モータ3のモータ軸に生じるトルク変動を低減することができる。
(もっと読む)
1 - 17 / 17
[ Back to top ]