
Fターム[3D041AD44]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | ブレーキ (1,198) | アンチスキッド作動 (22)
Fターム[3D041AD44]に分類される特許
1 - 20 / 22
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車体制振制御装置

【課題】車輪スリップ防止装置の作動→非作動で車体制振制御を再開させるとき、車輪スリップ防止装置が再作動されることのない態様で車体制振制御を再開させるようにする。
【解決手段】車輪スリップ防止装置の作動開始時に制振用制駆動トルク補正量指令dTw*を0にして車体制振制御を中断する。車輪スリップ防止装置の作動時間がT1未満である間、一時的低μ路面と判断し、車輪スリップ防止装置の作動時間がT1以上である間、継続的低μ路面と判断して、車体制振制御を引き続き中断する。車輪スリップ防止装置が非作動になった時からT2時間中は、誤判定防止のために継続的低μ路面の判定結果を維持し、車輪スリップ防止装置が非作動になった時からT4時間をかけて、制振用制駆動トルク補正量指令dTw*を0から徐々に(dTw_Tw+dTw_ΔF)へ復帰させ、制振制御をT4時間だけ遅延させる、制振制御復帰制御を行う。
(もっと読む)
車両の制御装置
【課題】低μ路の制動におけるフューエルカット復帰時のエンジンストールをより確実に回避することのできる車両の制御装置を提供する。
【解決手段】車両の惰性走行時にエンジンのフューエルカットと、エンジン出力軸及び変速機入力軸のロックアップと、を行う車両にあって、ブレーキ圧積算値が既定の解除判定値βを超えることを条件に、ロックアップ実行フラグ及びフューエルカット実行フラグをオフにセットして、ロックアップの開放とフューエルカットからの復帰とを実施するようにした。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
車両のトラクション制御装置
【課題】 駆動系のイナーシャ変化によらず安定したトラクション制御を達成可能な車両のトラクション制御装置を提供すること。
【解決手段】 トラクション制御装置において、トルク制御手段により駆動輪から路面に伝達される駆動力を所定量低下させるときに、動力源と駆動輪とを接続/解放するクラッチ要素の伝達トルク容量に応じて駆動力を低下させることとした。
(もっと読む)
車両制御装置
【課題】安定して走行している車両が、路面摩擦係数μが変化する路面にさしかかったとき、車両姿勢が乱れて挙動が不安定化することを防止する。
【解決手段】運転者は、走行路の前方にある路面氷結部を車両の左側の車輪が走行した後も、車両を直進走行させようとしている。しかし、左側の車輪だけが氷結部を走行したために、右側の車輪の加速力が左側の車輪の加速力より大きくなる。このため、車両は、その姿勢を大きく乱す。ECUは、この乱れを検出してから、車両姿勢を制御しようとすると、車両は、運転者の意図する方向よりも左方向に大きく向きを変えながら走行するようになる。そこで、ECUは、左側の車輪が氷結部を走行する直前に、車輪の転舵角または各車輪に作用させる制動力のうち少なくとも一方を制御して、氷結部を走行後の車両姿勢を制御して挙動を安定化させる。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、車両の走行状態に拘らず駆動力配分機構への過渡的な荷重入力を回避して耐久性の低下を図る。
【解決手段】車両の駆動輪17L,17Rに駆動力を付与するエンジン11と、この駆動力を左右の駆動輪17L,17Rへの配分を行う制御デフ15と、左右の駆動輪17L,17Rに対して独立して制動力を付与する電子制御式ブレーキ装置18とを設け、ECU31は、車両の運転状態に応じてエンジン11と制御デフ15と電子制御式ブレーキ装置18を制御可能に構成し、このECU31は、電子制御式ブレーキ装置18が作動するときに制御デフ15の作動を中止する。
(もっと読む)
車両制御装置
【課題】低速での定速走行制御時でも速度ハンチングを防止する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両(10)に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR等)と、特定される車輪速度に基づいて、各車輪に係る車輪速度有効速度を夫々演算する演算手段(51)とを備える。そして、これら各車輪について演算される車輪速度有効速度が所定速度閾値を下回るか否かに応じて、各車輪の車輪速度が夫々有効であるか否かを判定する判定手段(51)と、判定手段による判定結果に応じて、各車輪について演算される車輪速度有効速度のうち何れかの値を超える値に、目標速度を設定し直す設定手段(51)と、特定される車輪速度に基づいて当該車両の車体速度を推定する推定手段(51)とを備える。
(もっと読む)
制駆動力制御装置
【課題】異μ路乗り移り時に要求値に応じた適切な制動力を車輪に働かせること。
【解決手段】車輪10FL,10FR,10RL,10RRの油圧制動トルクの制御を行う油圧制動トルク制御手段24と、車輪のモータトルクの制御を行うモータ制御手段32と、車輪への要求全制動トルクを設定する要求全制動トルク設定手段41dと、要求油圧制動トルク及び要求モータトルクを要求全制動トルクに基づき各々設定する要求油圧制動トルク設定手段41e及び要求モータトルク設定手段41fと、車輌の前輪10FL,10FR側で路面の摩擦係数の変化を検出する路面摩擦係数変化検知手段41hと、を備え、その要求油圧制動トルク設定手段41eと要求モータトルク設定手段41fは、路面の摩擦係数の低下を検出した際に、後輪10RL,10RRの要求全制動トルクを維持したまま当該後輪10RL,10RRの要求油圧制動トルクを減少させるように構成すること。
(もっと読む)
制駆動力制御装置
【課題】低μ路乗り移り時に要求値に応じた適切な制動力を車輪に働かせること。
【解決手段】車輪の油圧制動トルクを制御する油圧制動トルク制御手段24と、車輪のモータトルクを制御するモータ制御手段32と、車輪への要求全制動トルクを設定する要求全制動トルク設定手段41dと、要求油圧制動トルク及び要求モータトルクを各々設定する要求油圧制動トルク設定手段41e及び要求モータトルク設定手段41fと、路面の摩擦係数の変化を検出する路面摩擦係数変化検知手段41iと、実油圧制動トルクを求める実油圧制動トルク演算手段41hと、を備え、路面の摩擦係数の低下検出時に、要求油圧制動トルク設定手段41eは、低μ路への乗り移りと共に要求全制動トルクの変化に合わせて要求油圧制動トルクを変化させ、要求モータトルク設定手段41fは、要求全制動トルクを満足させるべく実油圧制動トルクに応じて要求モータトルクを変化させること。
(もっと読む)
ドライブシャフトの軸トルク・路面タイヤ間作用力測定装置
【課題】 ドライブシャフトに作用する軸トルクの正確な測定が可能で、ドライブシャフトの軽量化に貢献できると共に、路面−タイヤ間の作用力を推定できる軸トルク・路面タイヤ間作用力測定装置を提供する。
【解決手段】 この軸トルク・路面タイヤ間作用力測定装置は、軸トルク演算手段6、制動力演算手段9、および、路面とタイヤ間の作用力を推定する作用力演算手段10を備える。ドライブシャフトの両端の等速ジョイントの外輪に、それぞれ第1および第2のセンサーターゲット1,2を取付ける。これら各センサーターゲット1,2に対向して、回転パルス信号を出力する第1および第2のセンサ3,4を設ける。前記軸トルク演算手段6は、両センサ3,4により検出した回転パルス信号から、ドライブシャフト11に生じたねじれに対応する回転パルス信号の位相差を演算処理して軸トルクを求める。前記作用力演算手段10は、ブレーキの制動力、および軸トルク演算手段6で求めた軸トルクから、路面とタイヤ間の作用力を推定する。
(もっと読む)
エンジン出力トルクモニタ装置、車両制御装置、及びエンジン出力トルクモニタ方法
【課題】エンジンの出力トルクが零付近である場合の出力トルク推定精度を向上させる。
【解決手段】本発明のエンジン出力トルクモニタ装置は、エンジンの運転状態を示す指標を利用してエンジンの出力トルク推定値を演算する出力トルク演算部50と、エンジンの出力トルクが零であると見込まれる状態において演算された出力トルク推定値から出力トルク補正量を演算する補正量演算部52と、出力トルク演算部により演算された出力トルク推定値を出力トルク補正量を用いて補正する出力トルク補正演算部54と、を備える。
(もっと読む)
車両用制御装置
【課題】スプリット路面において、急制動によりヨーモーメントが発生しても、車両をコントロールしやすくし、良好な制動力を発揮させる。
【解決手段】制動力調節装置10Bと操舵調節装置10Aとを制御部20により制御する。制御部20は、制動力調節装置を作動させて制動時の車輪のロックを抑制するアンチロックブレーキ制御を実行する。また、制御部20は、スプリット路面の走行中に制動に伴ってヨーモーメントが発生した場合に、ヨーモーメントを打ち消すべく高μ路側前輪をトーイン方向に操舵するとともに、低μ路側前輪の操舵方向を維持し、または車輪前後方向を対地速度方向へ操舵する。
(もっと読む)
走行支援システム
【課題】現在の走行支援システムは状況により、ドライバにとって最適な制御になっていない場合があり、たとえば圧雪路面でのABSのように危険を伴う制御となる場合もある。
【解決手段】車両の走行を支援手段により支援するものであって、乗員により天候状態が入力される複数の天候状態入力手段と、天候状態を検出する天候状態検出センサと、前記天候状態入力手段への入力結果、もしくは前記天候状態検出センサの出力結果のいずれかに基づき支援モードを決定するモード決定手段と、前記乗員により入力操作される悪天候モード入力手段と、を備え、前記モード決定手段は、前記悪天候モード入力手段への入力の存在時には前記天候状態検出センサの出力に基づき支援モードの決定を行い、前記悪天候モード入力手段への非入力状態では、前記天候状態入力手段の入力結果に基づき支援モードの決定を行い、前記支援モードに基づき前記支援手段が支援を実施する。
(もっと読む)
エンジンの制御装置
【課題】 車両が走行する道路環境に応じた制動力を車両に付与する。
【解決手段】 ECUは、アクセル開度Pがしきい値P(1)より小さいと(S110にてYES)、ナビゲーションシステムから取得した情報に基づいて、エンジンブレーキが必要な状況か否かを判別するステップ(S120)と、エンジンブレーキが必要である状況であると(S120にてYES)、所望の制動力のエンジンブレーキが作用するようなリフト量で吸気バルブおよび排気バルブが動作するように、バルブのリフト量を変更するVVL機構を制御するステップ(S130)と、エンジンブレーキが必要である状況でないと(S120にてNO)、吸気バルブおよび排気バルブのリフト量が最大になるようにVVL機構を制御するステップ(S140)とを含む、プログラムを実行する。
(もっと読む)
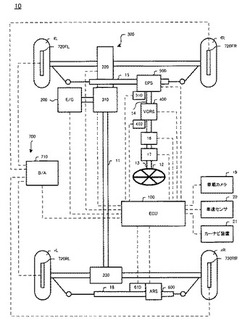
モータ化単線車両の駆動動的制御方法と駆動動的制御器
【課題】
前輪或いは後輪の浮上りのような臨界状況を確実に検出して制御するか、或いはカメラによってコーナリング中にブレーキをかけるモータ化単線車両の駆動動的制御方法と駆動動的制御器を提供すること。
【解決手段】
この発明は、車道に対する車両の傾斜角度(ρ)及び縦揺れ角度又はそのいずれか一方を考慮して記録されたカメラ画像シ−ケンスを評価するモータ化単線車両の駆動動的制御方法に関する。電気油圧式或いは電気機械式ブレーキ制御ユニットの制御閾値は、検知された傾斜角度(ρ)及びピッチ角度又はそのいずれか一方に依存して適合されている。
この発明は、電子制御部と駆動動的制御プログラム用メモリーを備える電気油圧式或いは電気機械式ブレーキ制御ユニットと、駆動動的制御器を備える画像シーケンス評価装置とから成り、この評価装置はさらに、標準ABS/TCS制御器(60)と、縦揺れ角度や縦揺れ速度を見積る第一ブロック(72)と、傾斜角度を見積る第二ブロック(73)と、制御閾値を算出する危機コンピュータ(80)とから成る。 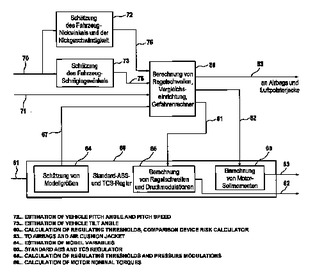 (もっと読む)
(もっと読む)
車両の駆動力制御装置
【課題】 車両を発進、走行させる際に、車両の固有振動数もしくは共振周波数に基づいて設定される周期で駆動力を変化させることにより、車両の発進・走行性能を向上させる。
【解決手段】 駆動力を変化させる車両の駆動力制御装置において、前記駆動力を変化させる制御を実行するための予め定めた開始条件の成立を判断する制御開始判断手段(ステップS2)と、前記制御開始判断手段により前記制御の開始条件が成立したことが判断された場合に、前記車両の共振周波数に基づいて前記駆動力を周期的に変化させる駆動力変更手段(ステップS4,S6)とを備えている。
(もっと読む)
1 - 20 / 22
[ Back to top ]