
Fターム[3D041AE45]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 車速、加減速度 (328)
Fターム[3D041AE45]に分類される特許
321 - 328 / 328
ハイブリッド駆動装置
本発明は、内燃機関、発電機、及び駆動車輪のドライブトレインに確動的に連結された電動機間の電力分割変速装置を備える自動車のハイブリッド駆動装置に関する。ドライブトレインの回転速度は、毎回、互いに非対称な態様で冗長性のある2つの異なる経路で確定される。  (もっと読む)
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両

【課題】
自車両のリスクポテンシャルの変化を運転者にわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
先行車に対する自車両のリスクポテンシャルを算出し、複数の領域から、算出したリスクポテンシャルの領域を判定する。そして、リスクポテンシャルの領域に対応して設定した制御反発力にしたがって、自車両に発生する制駆動力を制御する。リスクポテンシャルが大きな領域ほど制御反発力を大きくする。リスクポテンシャルが領域間を遷移するときは、制御反発力を徐々に変化させ、リスクポテンシャルの大きな領域へ遷移するほど遷移状態における制御反発力の変化量を大きくする。
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 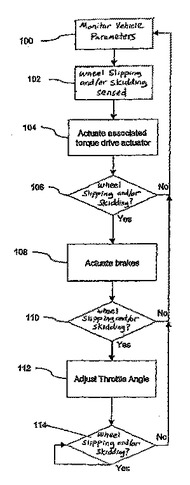 (もっと読む)
(もっと読む)
自動車両用の速度調整システム
本発明は、設定可能な目標・速度に依存して駆動モーメント又は制動モーメントを計算するための手段を備えた自動車両用の速度調整システムに関し、この際、目標・速度は操作可能な操作要素の単一操作により設定される。本発明に従い、操作要素を継続操作する場合には目標・速度に代わり目標・加速度が設定され、この目標・加速度から駆動モーメント又は制動モーメントが計算される。 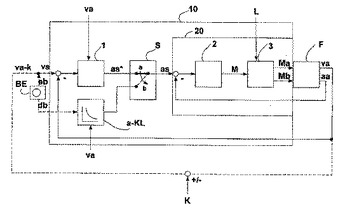 (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。 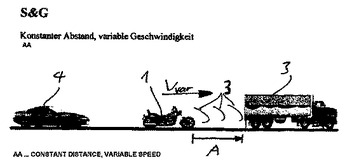 (もっと読む)
(もっと読む)
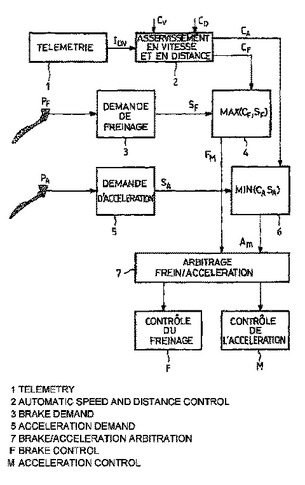
自動車のための距離制御付き速度制限方法及び速度制限装置
本発明は、測距手段と、距離と速度を制御するためのエンジン動作制御手段とが装備された自動車のための距離制御付き速度制限方法及び速度制限装置に関する。本発明の方法は、速度制限方法の起動後に、設定速度を選定し、同じ走行車線に、より低速な自動車が存在しない場合には、自動車の速度が設定速度以下である限りは、アクセルペダルに対する運転者の操作によって、また、設定速度に達するか超過するときには、速度制限方法の非活性化の可能性付きの、自動制御によってエンジントルクを制限することからなる。装備された自動車の前方に、より低速な目標自動車の存在する場合には、本方法は、速度の自動減速と、運転者によって調整可能な、2つの上記自動車の間の一定追随時間の維持と、速度制限方法の非活性化を伴わないで、運転者に本方法によって決定された速度の減速を許容することからなる。
 (もっと読む)
(もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。 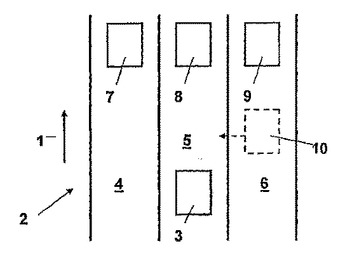 (もっと読む)
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 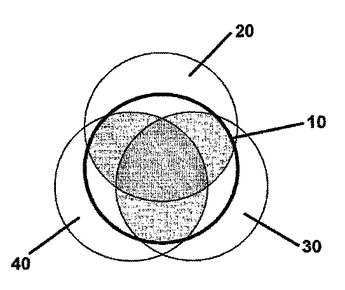 (もっと読む)
(もっと読む)
321 - 328 / 328
[ Back to top ]