
Fターム[3D041AE45]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 車速、加減速度 (328)
Fターム[3D041AE45]に分類される特許
121 - 140 / 328
車間距離制御装置
【課題】より安定した車間距離制御を行うことができる車間距離制御装置を提供すること。
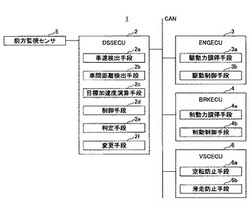
【解決手段】本発明による車間距離制御装置1は、自車両の車速を所定の組合せの車輪速に基づいて検出する車速検出手段2aと、先行車両と自車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して得られる車間時間を目標車間時間以上として、先行車両と自車両との車間距離を目標車間距離以上に保つように目標加速度GBASEを演算する目標加速度演算手段2cと、目標加速度GBASEに基づいて自車両を制御する制御手段2dと、車輪の空転滑走状態を判定する判定手段2eと、空転滑走状態が判定された場合に、所定の組合せを変更する変更手段2fを備えることを特徴とする。
(もっと読む)
車両の制御装置

【課題】車両の前輪に作用する路面反力と後輪に作用する路面反力とを適切に操作して、実際の車両の運動を所望の運動に適切に制御することを可能とする。
【解決手段】実際の車両1の運動の状態量と規範状態量との差である状態量偏差に応じて基本要求操作量Mfbdmd_aを決定し、この基本用要求操作量に応じて車輪の駆動・制動力操作用制御入力Fxfbdmd_nを決定する。このとき、基本要求操作量Mfbdmd_aの変化に対する、特定組の前輪および後輪のそれぞれのFxfbdmd_nの変化の割合(ゲイン)を、それぞれ横すべり角βf_act,βr_actなどの前輪側ゲイン調整パラメータ、後輪側ゲイン調整パラメータに応じて変化させる。
(もっと読む)
車両の運転支援装置
【課題】適切なタイミングで円滑な走行制御の介入を行うことができる車両の運転支援装置を提供する。
【解決手段】ACC制御時の目標減速度(要求減速度Ga)の演算を予め設定されたマップ等の演算情報を用いて行い、演算した目標減速度に基づいてブレーキ12の自動介入等の走行制御を行う運転支援装置2において、走行制御ユニット5は、自車両1が基準条件下で基準路を走行していると仮定した場合に発生することが予測される発生予測減速度Ghを演算するとともに、発生予測減速度Ghと実際の減速度G0との偏差ΔGを演算し、この偏差ΔGを用いて要求減速度Gaを補正して最終的な目標減速度である指示減速度Grを演算する。
(もっと読む)
車両の運転支援装置
【課題】複数パターンの追従目標車間距離を選択的に使用可能な場合にも、乗員に対して違和感を与えることなく円滑な追従走行制御を行うことができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、追従走行制御時のスロットル開度制御に供する目標車速Vtrgtを、追従目標車間距離Dtuijuと、追従目標車間距離Dtuijuよりも短い距離に設定された基準距離Dbaseと、先行車に対する車間距離Dnowとの相対関係に基づいて求める。これにより、複数パターンの追従目標車間距離を選択的に使用可能な場合にも、追従目標車間距離Dtuijuに対する車間距離Dnowの変化が目標車速Vtrgtに及ぼす影響度をモード毎に異ならせることができ、乗員に対して違和感を与えることなく円滑な追従走行制御を行うことができる。
(もっと読む)
駆動力制御装置
【課題】目標加速度に基づいた駆動力制御がなされる場合に車両のドライバビリティの悪化を抑制する。
【解決手段】車両10におけるECT400の変速期間において、ECU100は、変速時駆動力制御を実行する。当該制御は、トルク相処理とイナーシャ相処理とが含まれ、トルク相処理においては、車両10の実加速度αrが、アクセル開度に基づいて設定される目標加速度αtに対して定まる下限値αl未満となったか否かが判別される。一方、実加速度αrが下限値αlを下回った場合、イナーシャ相処理において、目標加速度αtと実加速度αrとの間に生じた相対的に大きな偏差を解消すべく駆動力の制御を行うことによって生じる実加速度及び駆動力の大きな変化によりドライバビリティが悪化することを防止するため、下限値αlと実加速度αrとの偏差に基づいて目標加速度αtが補正され、当該偏差が減少させられる。
(もっと読む)
車両の走行制御装置
【課題】追従走行中に先行車両に接近して車間距離が短くなった場合でも、強いブレーキ制御が行われることを抑制して、運転者が車両走行に違和感を覚えないようにする。
【解決手段】アクセルペダル作動後にアクセル操作がOFF状態となったことをアクセル操作検知部15で検知し、且つ先行車両検知部11で検知された先行車両Fとの車間距離が目標車間距離よりも短いときに、現在の車間距離を暫定車間距離として設定し、走行制御部17により該暫定車間距離に基づいて加減速制御して追従走行する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
交通環境に応じた適切な操作反力制御および制駆動力制御を行う車両用運転操作補助装置を提供する。
【解決手段】
コントローラは、自車両と前方障害物との接近度合を表すリスクポテンシャルを算出し、リスクポテンシャルに応じてアクセルペダルに発生させる操作反力の反力制御指令値および自車両に発生する制駆動力の補正量を算出する。アクセルペダルの操作状態から運転者の加減速意図を検出し、運転者の意図が加速意図を示す場合は、制御パターンを変更し、制御作動領域を短くしていく。例えば自車両が混雑した交通流を走行し、アクセルペダル操作による自車速の調整を行っている場合には、制御作動領域が自動的に短いものに切り替えられるので、運転者にわずらわしさを与えることのない制御を行うことができる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者が減速操作を終了するときに遅れなく制御を終了する車両用運転操作補助装置を提供する。
【解決手段】コントローラは、自車両と前方障害物との接近度合を表すリスクポテンシャルを算出し、リスクポテンシャルに応じてアクセルペダルに発生させる操作反力の反力制御指令値を算出する。コントローラは、ブレーキペダルの操作速度に基づいて運転者の減速終了意図を検出し、減速終了意図があると判定すると、リスクポテンシャルを補正する低応答補正と反力制御指令値を補正する高応答補正をそれぞれ行う。ブレーキペダル操作速度に基づく重み付けゲインにより、低応答補正と高応答補正の重み付けを決定する。
(もっと読む)
車両制御装置
【課題】操舵系に生ずる振動の増大を抑制して良好な操舵フィーリングを実現することのできる車両制御装置を提供すること。
【解決手段】特定周波数抽出部51は、操舵系の状態を示す信号としてのピニオン角θpから、EPSアクチュエータ22を構成する減速機構における歯打ち音(ラトル音)の発生を助長する振動に対応する周波数成分を抽出し、その実効値をパワースペクトルSpとして出力する。そして、速度ECU7は、そのパワースペクトルSpが所定の閾値以上となった場合には、当該パワースペクトルSpを低減すべく、車速を制御、詳しくは、車速Vが、第1の所定速度から第2の所定速度までの範囲から外れるように制御する。
(もっと読む)
走行支援制御システム、及び走行支援の制御方法
【課題】レーダ装置で物標の検出を開始してから、走行支援制御が実施されるまでの時間を短縮可能な走行支援制御システムの提供。
【解決手段】走行支援制御システムは、走行支援ECUと、レーダ波を送受信することにより、物標を認識するレーダセンサとを備える。レーダセンサにて物標候補を検出し、それら物標候補毎に検出情報を生成する度に、それらの検出情報に未確定、もしくは確定情報を付与した物標情報をレーダセンサから走行支援ECUへと送信する。走行支援ECUでは、レーダセンサにて、それらの物標候補が確定物標として確定される前に、レーダセンサから取得し蓄積した検出情報の履歴を用いて物標挙動を推定し、レーダセンサから確定情報を取得されると、その確定物標であるとされた物標候補に対する物標挙動の中で規定条件を満たす対象物標の推定挙動に従って走行支援制御を実行する。
(もっと読む)
動力制御装置および動力制御方法
【課題】定速走行制御で車両に制動力を与えながら当該車両を定速走行させている際にドライバがブレーキを踏んだ場合であっても、ブレーキの踏み込みに因る制動力をドライバが感じること、すなわちブレーキが効いているとドライバが感じることができる動力制御装置および動力制御方法を提供することを課題とする。
【解決手段】動力制御装置は、作動情報を取得し、取得した作動情報が「作動中」というものである場合には操作情報・ブレーキ動力値・定速動力値を取得し、取得した操作情報が「操作されている」というものであり且つ取得した定速動力値が負の値である場合において、取得したブレーキ動力値が当該定速動力値以上である場合には定速走行制御を維持し、取得したブレーキ動力値が当該定速動力値未満である場合には定速走行制御を解除する。
(もっと読む)
車両の制御装置
【課題】定速運転時においてアクセル操作に関するドライバの負担を軽減する車両の制御装置を提供する。
【解決手段】車両制御システムは、エンジン11の出力を調整するスロットル制御装置16と、その出力を駆動輪側に伝達する無段変速機26と、システム各部を制御するECU50とを備えている。ECU50は、車両が一定速度で走行している時のアクセル操作量を基準にして同アクセル操作量の近傍領域に加速度F/B制御の不感帯を設ける。そして、ECU50は、アクセル操作量が上記不感帯の領域外にあると判定した場合、都度のアクセル操作量に基づいて目標加速度を算出し、その目標加速度に車両の実加速度を一致させるべく加速度F/B制御を実施する。一方、アクセル操作量が上記不感帯の領域内にあると判定した場合、ECU50は、加速度F/B制御に代えて、実車速をその目標値に一致させるべく車速F/B制御を実施する。
(もっと読む)
車両の走行安全装置
【課題】運転者の安全装置に対する依存度を推定し安全装置の作動に反映させる。
【解決手段】運転者の加速意志を検出する車両加速状態検出部13bおよび加速操作検出部13cと、認識カーブに対する依存判定距離を算出する依存判定距離算出部19aと、運転者の安全装置18に対する依存度を推定する依存度推定部19と、備え、依存度推定部19は、自車位置検出部12により検出された自車位置と認識カーブ入口との距離が依存判定距離算出部19aにより算出された依存判定距離以下であり且つ乗員の加速意志が検出された場合には、運転者が安全装置18に対し依存していると推定するとともに、運転者が安全装置18に対し依存していると推定した場合には安全装置18の作動が抑制されるように設定を変更する。
(もっと読む)
車両走行制御装置
【課題】駆動から制動への過渡領域の減速度の不足を防止できる車両走行制御装置を提供すること。
【解決手段】本発明による車両走行制御装置1は、車両の走行状態に基づいて目標駆動力を演算する目標駆動力演算手段2と、目標駆動力に基づいて車両の駆動装置を制御する駆動制御手段3と、目標駆動力が前記駆動装置の駆動力実現範囲の下限値よりも小さい場合に車両の制動装置を制御する制動制御手段4と、車両の減速状態を検出する減速状態検出手段と、減速状態が検出されて、目標駆動力が駆動力実現範囲の下限値よりも大きい場合に、目標駆動力を所定の補正量だけ小さい側に補正する補正手段2とを備えることを特徴とする。
(もっと読む)
車速制御装置
【課題】車両が定速走行しており、定速走行速度が変化するときに車両の速度が変わるタイミングの目安をユーザに報知する車速制御装置を提供する。
【解決手段】車両が、法定速度変化地点より500mの位置になると、自車位置周辺の地図20とともに、法定速度変化地点周辺の拡大地図30a,30bが分割画面として表示される。中央の拡大地図30aには、自車位置マーク21とともに法定速度変化地点31と法定速度変化地点までの距離を示したインジケータ32aとが表示される。左側の拡大地図30bには、自車位置マーク21とともに法定速度変化地点31と加速開始地点33と速度変化グラフ34aとが表示される。車両が法定速度変化地点より50mの位置になると、拡大地図は、拡大地図30a,30bに比べて縮尺率の大きい拡大地図30c,30dに更新される。
(もっと読む)
車間距離制御装置
【課題】運転者の負荷を軽減した車間距離制御装置を提供する。
【解決手段】先行車両および車両周辺を監視し、合流車両が合流できるように自車両と先行車両との車間距離を制御する車間距離制御装置1であって、合流する車両を検知し(S14)、合流する車両の全長Rが所定値X以上の場合は(S16)、目標車間距離をR+αと設定する。これによって、合流する車両Cに応じた運転者の判断や操作が不要となる。
(もっと読む)
シリーズハイブリッド車両の制御装置
【課題】本発明は、シリーズハイブリッド車両の制御装置において、有段変速状態と無段変速状態を得られるように構成した上で、有段変速状態の変速時に、乗員に違和感を感じさせずにドライブフィーリングを向上することができるシリーズハイブリッド車両の制御装置を提供することを目的とする。
【解決手段】現在のエンジンの動作点であるポイント「X」から目標のポイント「Y」までの間を、エンジン回転数が一気に変化する破線で示す変速制御ラインZを設定する。この変速制御ラインZをトレースするように、ジェネレータの負荷トルクを制御して、エンジンの回転数変化が高効率ラインL′をトレースする場合よりも、より早く変化するようにジェネレータ及びエンジンを制御する。
(もっと読む)
パワートレインの制御装置
【課題】減速運転中の燃費とドライバビリティを両立させる。
【解決手段】減速運転中でエンジン回転速度Neが燃料カット領域(燃料カット復帰回転速度FCNe以上の領域)のときに燃料カット制御を実行して燃費を向上させる共に、ロックアップクラッチのスリップ量を制御してエンジン回転速度Neの急低下を防止する。そして、エンジン回転速度Neが燃料カット復帰回転速度FCNeよりも高回転側に設定したダウンシフト判定値まで低下する毎に、変速歯車機構をダウンシフトさせてエンジン回転速度Neを燃料カット領域に維持する。更に、ダウンシフトによってタービン回転速度Ntが上昇し始める時点で、ダウンシフト後のエンジン回転の減速度が過大にならないように電子スロットル装置でスロットル開度を調整してエンジンブレーキ力を補正するエンジンブレーキ補正制御を実行して、意図しない急減速の発生を防止する。
(もっと読む)
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
走行支援装置
【課題】 乗り心地を悪化させることなく車線維持支援を行うことができる走行支援装置を提供する。
【解決手段】 走行支援装置1は、自車両のヨー角やオフセット、道路曲率を検出するステレオカメラ11、走行路情報を取得するナビゲーションシステム13、およびステレオカメラ11などの検出結果から目標速度パターンを設定し、該目標速度パターンに基づいてスロットルアクチュエータ31やブレーキアクチュエータ33を制御して車両の速度制御を行うECU20などを備えている。ECU20は、実走行軌跡が目標走行軌跡よりも内側に位置している場合には、カーブ路において、車両を加速するように目標速度パターンを設定し、実走行軌跡が目標走行軌跡よりも外側に位置している場合には、車両を減速するように目標速度パターンを設定し、カーブ路走行時に車両に作用する横加速度との均衡点をずらすことによって横偏差誤差を解消する。
(もっと読む)
121 - 140 / 328
[ Back to top ]