
Fターム[3D041AE45]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 車速、加減速度 (328)
Fターム[3D041AE45]に分類される特許
81 - 100 / 328
車両パワートレイン制御方法及び該方法を実行するプログラム
【課題】車両運転条件にかかわらず、ドライバに心地よい加速感を与えることができる車両パワートレイン制御方法及び該方法を実行するプログラムを提供する。
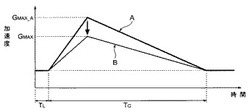
【解決手段】車両を加速操作するための車両パワートレイン制御方法であって、車両加速要求に応じて車両を加速させるための所定期間継続する車両の一次目標加速度波形Aを演算する工程と、一次目標加速度波形Aの最大加速度GMAX_Aが所定制限加速度GMAXとなるように、一次目標加速度波形Aの振幅を前記所定期間TGにわたり略一定の割合(補正係数K)で減少補正した二次目標加速度波形Bを演算する工程と、二次目標加速度波形Bに基づいて車両パワートレインを制御する工程と、を備えた。
(もっと読む)
車両用走行制御装置

【課題】ドライバが設定車速の変更操作中に、ナビゲーション装置から得られる制限車速に変更された時に、設定車速と制限車速とを一致させる。
【解決手段】車両用走行制御装置は、車両が定速走行する際の設定車速を設定するための操作手段2と、自車両が走行している道路の制限車速を取得する制限車速取得手段3とを備える。そして、変更手段1は、操作手段2による設定と、制限車速取得手段3により取得された制限車速の変化とが所定条件を満たす場合に、操作手段2による設定を無効にする。さらに、変更手段1は、設定車速を制限車速取得手段3により取得された制限車速と一致するように変更する。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者の発進操作に合致させて自車両を自動発進させる。
【解決手段】走行制御装置は、先行車両の走行状態を検出する先行車発進判定部24と、自車両のブレーキペダルの操作状態を検出するブレーキ操作状態判定部25と、自車両の制動力及び駆動力の少なくとも何れかを制御するとともに、先行車発進判定部24が先行車両の発進を検出した後、ブレーキ操作状態判定部25がブレーキペダルが踏み込み状態から戻され始めたことを検出すると、先行車両の走行状態を基に自車両が発進可能な制駆動力を制御する目標追従発進加速度算出部26と、を備える。
(もっと読む)
車両の挙動制御装置
【課題】旋回状態指標値が所定の条件を満たしたときに車両の駆動出力制限を実行する車両の挙動制御装置に於いて、従前の挙動制御とは異なる条件に応じて挙動制御に於ける駆動出力制限の解除又は駆動出力制限の程度の軽減ができ、早期に車両が運転者の意図通りに速やかに加速できるようにすること。
【解決手段】本発明の車両の挙動制御装置は、アンダーステア、オーバーステア、スピン、ドリフトアウト等の挙動の悪化を回避するために、車両の駆動出力制限を実行する駆動出力制限手段を含み、制御旋回状態指標値が所定の条件を満たしていても、操舵角の大きさが所定角度を下回ったときに、駆動出力制限手段が駆動出力の制限の少なくとも一部を解除する。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
車両の運動制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の運動制御装置を提供すること。
【解決手段】この装置では、車速Vxを設定車速Voに維持する定速制御実行中において、カーブの存在が認識されると、「予め記憶されている原動機制動トルク特性と予め設定されている変速機の変速パターンとに基づいて決定される車速の減少特性」と、カーブ走行に適正な車速Vqと、車速Vqを達成するための目標地点Pcrとに基づいて、地点Pcrにおいて車速Vqまで車両を減速させるための目標車速特性Vt(A-B線)が演算される。そして、カーブと車両との相対位置と車速Vxとの関係が目標車速特性Vtを満足した場合(地点Pcs1)、減速制御が開始・実行される。減速制御では、原動機制動トルクが作用させられ、且つ上記変速パターンに従ってシフトダウンされていく。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
車両の運動制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の運動制御装置を提供すること。
【解決手段】この装置では、カーブの形状に基づいて、カーブの途中の基準地点Pcrと、基準地点Pcrを車両が通過する際における適正車速Vqとが決定される。基準地点Pcrと適正車速Vqとに基づいて、基準地点Pcrから手前側の道路上にて車両の減速が行われる場合における道路上の位置に対する車速の減少特性の目標(目標車速特性Vt)が演算される。現在の車速Vxが、目標車速特性Vtから得られる車両の現在位置に対応する車速を超えた地点Pcsにて減速制御が開始される。車速Vxが適正車速Vqを含む所定範囲Hn内に達したとき(点G)に減速制御が終了される。減速制御の終了に続いて所定期間に亘って車両の加速を制限する加速制限制御が実行される。
(もっと読む)
内燃機関の電子制御装置及び速度制御方法
【課題】スロットルバルブの開度の変更及びバルブの駆動位相の変更等に起因する速度の変動を低減して、目標速度を安定して維持することのできる内燃機関の速度制御装置を提供する。
【解決手段】スロットルバルブ駆動機構37によるスロットルバルブ36の開度を制御するスロットルバルブ制御部8Aと、可変バルブタイミング機構6によるバルブの駆動位相を制御するバルブ位相制御部8Bとを備えた内燃機関の電子制御装置8であって、前記バルブ位相制御部8Bに、前記スロットルバルブ制御部8Aによる前記スロットルバルブ36の制御開度が一定の下で目標速度を維持するように、前記バルブの駆動位相を制御する定速制御部8Cを備えている。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
車両及び車両の制御装置
【課題】通知を乗用者に体感させられるようにする。
【解決手段】車両が、所定のイベントを検出するイベント検出手段(3)と、前記所定のイベントが検出されたときに、断続的にブレーキを効かせる制動制御を実行する制動制御手段(101)とを備える。断続的にブレーキを効かせる間隔、及び、各回のブレーキの効きによる減速度が、断続的なブレーキが効いていることを乗用者が体感できる程度に大きい間隔及び減速度である。
(もっと読む)
車両の統合制御システム
【課題】フェイルセーフ性を向上させるとともに、車両制御機能の追加に容易に対応可能な、車両の統合制御システムを提供する。
【解決手段】統合制御システムは、運転者の操作に基づいて、駆動系を制御する主制御系(アクセル)と、制動系を制御する主制御系(ブレーキ)と、操舵系を制御する主制御系(ステア)と、車両の周囲の環境情報または運転者に関する情報に基づいて、各主制御系において用いられる情報を作成して出力するアドバイザユニットと、予め定められた挙動を車両に実現させるために各主制御系において用いられる情報を作成して出力するエージェントユニットと、現在の車両の動的状態に基づいて、各主制御系において用いられる情報を作成して出力するサポータユニットとを含む。
(もっと読む)
車両の定速走行装置
【課題】過給機付エンジンおよび自動変速機を搭載した車両においてオートクルーズ制御を行なう際に、車両の挙動を安定させることで車両乗員に違和感を与える事態を回避するようにする。
【解決手段】 実車速VAとオートクルーズ設定車速VSとに基づき過給機11付きのエンジン12のスロットルバルブの第1目標開度T1を設定する第1目標開度設定手段23と、第1目標開度T1が増加傾向,減少傾向或いは維持傾向にあるのかを判定する変化傾向判定手段24と、エンジン回転数NEと変化傾向判定手段23による判定結果とに応じて第1目標開度T1を補正しエンジン12のスロットルバルブの第2目標開度T2とする開度補正手段25と、第2目標開度T2に従ってスロットルバルブを制御するスロットルバルブ制御手段16と、実車速VAと第2目標開度T2とに基づいて自動変速機13を制御する変速制御手段17と備えて構成する。
(もっと読む)
車両の車速制限装置
【課題】車速制限動作を解除した際に運転者の意図に沿った加速を実現することができる車両の車速制限装置を提供する。
【解決手段】車速制限動作が解除された際のギヤ段を、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも小さいとき(dpapbf<X2)にLoギヤ側に1つだけ小さいギヤ段に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも大きくかつ第3の所定の変化割合X3よりも小さいとき(X2≦dpapbf<X3)にLoギヤ側に2つ小さいギヤ段に、更に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第3の所定の変化割合X3よりも大きいとき(dpapbf≧X3)にLoギヤ側に実現可能な最小のギヤ段にそれぞれ変更している。
(もっと読む)
車両の走行制御装置
【課題】運転者のシフトレバーの操作間違いやペダルの踏み間違いにより車両の安全走行状態が損なわれないように車両を制御すると共に、運転操作の誤りを違和感なく確実に運転者に理解させる。
【解決手段】車両の走行制御装置10は、車両の速度を検出する速度検出部2と、車両の加速度を検出する加速度検出部3と、車両の速度に応じて設定された上限加速度以内に、車両の加速度を制限する加速度制限部1と、を備える。
(もっと読む)
駆動力源回転数制御装置
【課題】加速要求時に車速変化にエンジン回転数を連動させるCVTを備えた車両において走行抵抗増加などで車両が減速してもドライバーに違和感を生じさせないようにする。
【解決手段】加速要求時に車速SPDが減速状態であると判定された場合(S228でNO)は、加速状態であると判定された場合(S228でYES)よりも、車速SPD変化(Dnoutcvt)に対して連動するエンジン回転数の低下を抑制している(S232,S234)。この低下抑制は、目標入力軸回転数NINLINEの変化勾配を設定することで車速SPDに対する連動を実行するに際し、加速状態傾斜係数βa(SPD,ACCP)の絶対値より、減速状態傾斜係数βb(SPD,ACCP)の絶対値を小さくすることで連動を鈍化することで行われている。このことにより加速要求時に減速状態となってもエンジン回転数の低下が少なくなり、車両減速を助長することがないのでドライバーに違和感を生じさせないようにできる。
(もっと読む)
車両の制御装置
【課題】緊急回避時における車両の応答性を向上する。
【解決手段】車両(1)の制御装置は、障害物を回避するための回避力を車両に付与可能である第1回避手段(23a、23b)と、回避力を打ち消す打消力又は回避力を車両に付与可能である第2回避手段(25a〜25d)とを備える車両を制御する制御装置であって、障害物を検知して、検知された障害物との衝突危険度を取得する危険度取得手段(102)と、取得された衝突危険度が危険度閾値より大きいことを条件に、回避力を車両に付与するように第1回避手段を制御すると共に、打消力を車両に付与するように第2回避手段を制御し、車両の運転者が所定種類の回避操作を行った際に、打消力を付与することを停止する又は打消力に代えて回避力を車両に付与するように第2回避手段を制御する制御手段(101)とを備える。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】車両の走行を適切に支援できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】定車間制御状態にある場合に所定の条件の少なくともいずれか1つが成立すると、制御装置3は、定車間制御状態から減速支援制御状態に遷移するよう各部を制御するように構成した(状態遷移G)。すなわち、検出された自車両の走行環境に基づいて、または、検出したドライバの操作に基づいて、定車間制御を解除するが、減速支援制御は解除しないように構成した。したがって、定車間制御によって車両が加速されることを防止して、車両の減速を行う減速支援制御を継続できる。これにより、ドライバの意図しない車両挙動を防止しつつ、減速を支援する走行シーンを拡大できるので、走行環境やドライバの操作に応じて適切に車両の走行を支援できる。
(もっと読む)
シフト動作制御装置
【課題】船外機におけるエンジン出力の安定性を確保しつつ、シフトイン時の衝撃を軽減する。
【解決手段】シフトイン操作判定手段61は、リモコンレバー52の操作に応じた信号に基づいてシフトインを判定し、点火タイミング制御手段63は、シフトイン操作判定手段61によるシフトインの判定結果に基づいて、エンジン22の点火タイミングを遅角させ、シフトイン指令手段64は、エンジン22の点火タイミングが遅角された状態でドッグクラッチ25dを前進用ベベルギア25bまたは後進用ベベルギア25cに噛み込ませるようにシフトアクチュエータ44に指令する。
(もっと読む)
制駆動制御装置及びそれを備えた車両
【課題】
ドライバに速度不足感を与えることなく、車両の運動状態に対して好適に、車両の横方向の運動に連携して車両の前後方向の運動を制御する制駆動制御装置を提供することを課題とする。さらに、燃費の悪化を最小限に抑えつつ、車両の横方向の運動に連携して車両の前後方向の運動を制御する制駆動制御装置を提供することを課題とする。
【解決手段】
上記課題は、車両の横加速度を取得する横加速度取得手段と、車両の前後加速度を制御する前後加速度制御手段とを有し、車両の横加速度の絶対値が増加傾向にあるときは、車両の前後加速度を減少させ、車両の横加速度の絶対値が減少傾向にあるときは、車両の前後加速度を増加させるように、車両の制駆動力を制御する、ことにより解決できる。
(もっと読む)
81 - 100 / 328
[ Back to top ]