
Fターム[3D041AE45]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 車速、加減速度 (328)
Fターム[3D041AE45]に分類される特許
61 - 80 / 328
運転支援装置
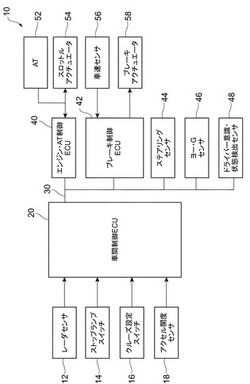
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
圧縮自己着火式エンジンを搭載した車両の制御方法及びその装置

【課題】アイドルストップを行う車両のディーゼルエンジンDEにおいて、自動停止時の掃気による気筒内の温度低下を抑制し、再始動性を向上させる。
【解決手段】エンジンDEを自動停止させる際に、自動変速機ATのトルクコンバータ50のロックアップクラッチ56を締結させて、エンジンDEの回転抵抗を増大させる工程(ステップS4)と、エンジンDEへの燃料供給を停止する工程(ステップS6)と、フォワードクラッチ63のスリップ制御によってエンジンDEの回転抵抗の大きさを調整する工程(ステップS7)と、を有する。
(もっと読む)
車両
【課題】横追従走行において障害物を有効に回避して追従走行を継続する。
【解決手段】横追従時に、走行を継続した場合の衝突を検知するとブレーキを発動して一旦停止する。その後た障害物との距離と比較し、横追従の車間距離分を移動するのに必要な障害物間の距離を確保するまで進行方向と180°反対の方向へバックさせる。横移動に必要な障害物間の距離を確保した後、処理を縦追従に切り替え、縦追従の車間距離に追従車両の最小旋回半径と追従車両のベクトルで先行車中心から引いた直線の交点を目標点として設定する。縦追従処理開始後は、車間距離を定義された縦車間距離になるまで徐々に車間距離を縮め縦追従に移行する。
(もっと読む)
車両速度制御装置および車両速度制御方法
【課題】 ドライバの速度制御への介入が容易であり、利便性の向上を図ることができる車両速度制御装置および車両速度制御方法を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、ドライバのブレーキ操作状態を検出するマスタシリンダ圧センサ104と、自車両と先行車両との距離を検出するカメラ107と、自車両の走行速度を制御するエンジン112およびブレーキ装置(ブレーキ液圧ユニット101,ブレーキECU102)と、カメラ107により検出された先行車との距離Dcaが速度制御許可範囲内で、かつ、アクセル開度センサ110とマスタシリンダ圧センサ104により検出された操作状態があらかじめ設定された所定の状態の場合、自車両と先行車との相対関係を維持するように速度制御部(エンジン112およびブレーキ装置)を作動させるブレーキECU102と、を備えた。
(もっと読む)
制動力制御装置
【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
車両挙動制御装置
【課題】摩擦円の影響が小さい緩加速時やアクセルオフ等での不必要な車両制御を防止して、違和感無く自然で扱いやすい車両挙動を実現すると共に、各輪のグリップ状態を監視して、必要な運転領域では確実に、限界領域における車両挙動の安定性を確保する。
【解決手段】制御部50は、前後軸の接地荷重に基づく第1のステア特性量A1と摩擦円の限界を考慮した第2のステア特性量A2を演算し、A1≧A2の場合は、エンジントルク制御、及び、舵角制御を禁止する。また、A1<A2の場合は、第1のステア特性量A1と第2のステア特性量A2の差分を考慮した、エンジントルク制御、及び、舵角制御を実行する。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作状態との協調を図りながら、車両の安定走行のために車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1以下である場合、制動装置12の動作が優先的に補正された上で必要に応じて操舵装置11の動作が補足的に補正される。その一方、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1を超えている場合、操舵装置11の動作が優先的に補正された上で、必要に応じて制動装置12の動作が補足的に補正される。
(もっと読む)
車線逸脱防止制御装置
【課題】車両の走行状況に応じて適切な支援レベルの操舵力を得られる車線逸脱防止制御装置を提供する。
【解決手段】車線逸脱防止制御装置を、走行状況検出手段140と、車線認識手段110と、目標横位置設定手段120と、自車両の横位置を認識する自車横位置認識手段130と、操舵機構の実ステア角を検出する実ステア角検出手段23と、自車両が目標横位置に近づく目標ステア角を算出する目標ステア角算出手段151と、第1の操舵力をステア角のフィードバック制御により設定する第1の操舵力設定手段152と、第2の操舵力を目標ステア角と車両状態量に基づいた操舵力のフィードフォワード制御により設定する第2の操舵力設定手段153と、走行状況に応じて第1の操舵力と第2の操舵力との比率を変化させて目標操舵力を設定する目標操舵力設定手段150と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段160とを備える構成とする。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵が繰り返されたとき車体スリップ角の2階微分値の寄与によるスピン抑制効果の低減を回避すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後の所定の期間内に前記の一方の方向とは逆の方向に操舵が実行され車体スリップ角の2階微分値の大きさが所定値を超えたときには、スピン状態量に於ける車体スリップ角の2階微分値の寄与が低減されることを特徴とする。
(もっと読む)
車両の空調および制動制御装置
【課題】車両減速中における空調装置の蓄冷器への蓄冷中に、圧縮機による冷媒供給が停止することにより発生する、圧縮機減速トルク消失による制動距離の増加や、乗員の不快感を抑制する。
【解決手段】蓄冷器40に蓄冷中に、それ以上の蓄冷が不可能になり、圧縮機1の作動を停止させたときに、空調用制御装置5から、変速機制御装置54に信号を送信し、無段変速機50の減速比を増加させて、圧縮機減速トルク消失にともなう、最終減速トルクの不足を補う。無段変速機50の代わりに、車両用交流発電機や、モータジェネレータの出力を増加させるように制御しても良いし、自動ブレーキ装置を差動させても良い。また、これら変速機50等のいずれかを選択しても、組み合わせて使用しても良い。
(もっと読む)
車両用制御装置
【課題】車両が加速惰性走行を行っている最中にコーナリングを開始しても、内燃機関が燃料消費率の高い運転状態で作動することを抑制可能な車両用の制御技術を提供する。
【解決手段】HVECU100は、内燃機関10を作動状態にして駆動力により車両1が駆動される加速走行と、内燃機関10を非作動状態にして慣性力により車両1が惰性で走行する惰性走行とを、予め設定された上限車速と下限車速との間において繰り返し行って走行する加速惰性走行を車両1に行わせる。HVECU100は、加速走行中においてコーナリング中であると判定した場合には、当該加速走行を中止すると共に、当該コーナリング中において加速走行を中止しない場合に比べて駆動力を低下させると共に、モータMG1を発電機として作動させて、駆動力を低下させた分の機械的動力を充電電力に変換する。
(もっと読む)
車両の制御装置
【課題】排気浄化装置の浄化能力を回復させる回復制御を行う車両において、クロール制御を安定して行うことができる車両の制御装置を提供する。
【解決手段】車両は、ディーゼルエンジンの排気の浄化を行う触媒コンバータ及びPMフィルタを含む排気浄化装置が設けられる。排気浄化装置における浄化能力を回復させる回復制御に相当するPM再生制御及びS被毒回復制御が電子制御装置により行われる。また、電子制御装置により車両の速度を所定の低速領域に維持するクロール制御が実行される。クロール制御が実行される際に回復制御の実行を禁止する回復制御禁止判定処理が電子制御装置により実行される。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両の走行中運転席ドアが開いている場合にも、車両の走行を可能とする。
【解決手段】車両10に設けられた複数のドア14A、14Cが、走行中に開いているかどうかを検出し、いずれかのドア14A、14Cが開いていると検出されたとき、開いているドアが運転席ドア14Aであるかどうかを判定し、運転席ドア14Aのみが開いていると判定された場合に、車両10の走行を許可するようにしているので、運転席ドア14Aを開けて周りを確認しながら駐車する際、円滑に駐車することができる。
(もっと読む)
車両及び車両の制御方法
【課題】インバータ回路を三相短絡状態にした場合において、機器類の疲労の蓄積を抑制する。
【解決手段】ハイブリッド自動車20において、相短絡異常が生じたインバータ43を三相短絡状態にしている場合、モータMG3のコイル温度tmに基づいて後車軸69a,69bとモータMG3との共振による振動が発生する共振発生車速領域の下限値である閾値Vref1,上限値である閾値Vref2を設定し、車速センサ88が検出した車速が設定した共振発生車速領域に入るときにはダメージカウンタCに値1を加算する。そして、ダメージカウンタCが閾値Crefより大きいと判定されたときは、モータMG3などのリヤ側機器類がこれ以上振動による疲労を蓄積すべきでない状態であるとみなして、車速Vが閾値Vref1以上にならないよう要求トルクを制限し、制限後の要求トルクで走行するようエンジン22及びモータMG1,MG2を制御する。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、立ち下がり時のトルク感のある加速度波形(G波形)を演出して、車両の加速感を高めることができる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、この目標加速度Gの時系列データをもとに、エンジン出力をフィードバック制御で制御する。具体的には、車両の実加速度Gが目標加速度Gとなるように、スロットル開度や点火タイミング等を変化させてエンジン出力を制御する。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
走行制御装置
【課題】ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供する。
【解決手段】走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知した場合、アクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。また、走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。
(もっと読む)
車両の接触回避支援装置
【課題】 自車に接近してくる対向車に対する接触回避支援制御を的確に行えるようにする。
【解決手段】 対向車判定手段M2が物体検知手段M1により検知された物体および自車の相対速度から対向車を判定し、対向車進路予測手段M3が対向車進路を予測し、対向車間隔検知手段M4が複数の対向車間の車間距離あるいは車間時間を検知し、接触回避支援手段Uが前記車間距離あるいは車間時間に応じて、対向車との接触を回避し、あるいは接触した場合の被害を軽減する接触回避支援の内容を変更する。複数の対向車間の車間距離あるいは車間時間が短いと運転者は対向車に注意を集中し、逆に前記車間距離あるいは車間時間が長いと運転者は対向車に注意を集中しなくなるが、前記車間距離あるいは車間時間に応じて接触回避支援の内容を変更することで、運転者の注意力に応じた必要かつ充分な接触回避支援を行うことができる。
(もっと読む)
車速制御装置
【課題】
路面の凹凸による振動が車両のばね上と共振することを確実に回避して、車両の乗り心地性能の向上が図れる車速制御装置を提供すること。
【解決手段】
車両の車速を制御する車速制御装置1であって、路面の凹凸による振動が車両のばね上と共振することを避けるように車速を増減して車速制御する。これにより、車両のばね上共振が避けられるため、車両の乗り心地性能の向上が図れる。
(もっと読む)
走行制御装置
【課題】より余裕を持って歩行者に対処することが可能な走行制御装置を提供する。
【解決手段】光ビーコン40より危険度Dnを受信する通信部62と、車両60の走行計画を生成する目標算出部64とを備え、目標算出部64は、通信部62が受信した危険度Dnに基づいて走行計画を修正する。これにより、車両60は予め当該危険度Dnに基づいて修正された走行計画に従って走行することになり、車両60の運転者は、横断歩行者の存在を報知される前に、より余裕を持って歩行者に対処することが可能となる。
(もっと読む)
61 - 80 / 328
[ Back to top ]