
Fターム[3D043EE05]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける検出(入力信号) (1,677) | 車両の運動状況 (820)
Fターム[3D043EE05]の下位に属するFターム
Fターム[3D043EE05]に分類される特許
1 - 20 / 41
車両の制御装置
【課題】アクセルオフ時の旋回初期の車両安定性を確保する。
【解決手段】アクセルオフによるエンジンブレーキ作動状態で、前輪が路面から受けるトルク(反力トルク)が、後輪が路面から受けるトルクよりも大きい場合(前輪回転数<後輪回転数の場合)には四輪駆動状態にする。このような制御によりエンジンブレーキ作動時(減速時)に四輪駆動状態にすることによって、前輪が路面から受けるトルクの一部が後輪に伝達される。これにより前輪の縦方向(車両が進む方向)の路面摩擦力が小さくなって、前輪の横力が大きくなるので、アクセルオフでの旋回初期の回頭性が向上する。その結果として、アクセルオフでの旋回初期における車両安定性を確保することができる。
(もっと読む)
駆動力配分装置

【課題】 四輪駆動車両において、駆動力配分装置から発生するギア音が聞こえ得る状態で、ギア音を低減する。
【解決手段】 駆動輪WFR、WFL及び従駆動輪WRR、WRLを備えた四輪駆動車両1において、制御手段8a2は、変速段検出手段8a3によって検出された四輪駆動車両1の変速機TMの現在の変速段が所定の変速段以上で、直進状態判定手段8a1が直進状態と判定した場合、四輪駆動車両1のアクセルペダルの操作量が所定の操作量以上であるとき、従駆動輪WRR、WRLに配分する駆動力を減少する。
(もっと読む)
電気自動車の駆動システム
【課題】航続可能距離を伸ばすと共に車体における前面衝突時のための補強の増加を抑制する。
【解決手段】駆動システム10では、発電機22の回転子36が走行中常時回転されるプロペラシャフト16に一体回転可能に固定されている。従って、電気自動車の走行時には、発電機22にて電力が発生されてバッテリユニット24が充電されるので航続可能距離を伸ばすことができる。また、プロペラシャフト16は、バッテリユニット24を貫通している。従って、電気自動車に前面衝突が生じ、プロペラシャフト16が車両上下方向下側へ折れたときには、このプロペラシャフト16がバッテリユニット24と干渉されることで、バッテリユニット24を車体から落下させることができる。これにより、車室に作用する慣性マスとしてのバッテリユニット24を車体から切り離すことができるので、車体における前面衝突時のための補強の増加を抑制できる。
(もっと読む)
車両制御装置
【課題】本発明は、車両制御装置に関し、車両の制御状態について特定の走行モードの選択に伴う自動切替とスイッチ操作に伴う手動切替とで制御干渉が発生するのを防止することにある。
【解決手段】所定制御スイッチの操作により車両の制御状態を切り替える手動制御状態切替手段と、車両走行時における走行モードを選択する走行モード選択手段と、走行モード選択手段により通常走行モード以外の特定の走行モードが選択された場合に、車両の制御状態を自動的に所定の制御状態に切り替える自動制御状態切替手段と、走行モード選択手段により通常走行モード以外の特定の走行モードが選択されている場合に、手動制御状態切替手段によって特定の所定制御スイッチの操作により車両の制御状態が切り替わるのを制限する手動切替制限手段と、を設ける。
(もっと読む)
車両制御装置
【課題】車両の直進性の向上
【解決手段】個別に設けた駆動源(内燃機関10、第1,第2及び第3のモータ/ジェネレータ31,32,33)によって前輪Wfl,Wfrと後輪Wrl,Wrrを各々独立して駆動させる車両の車両制御装置(メインECU71、機関ECU72、モータ/ジェネレータECU73)において、前輪Wfl,Wfrの車輪速度と後輪Wrl,Wrrの車輪速度に差がある場合、前輪Wfl,Wfr又は後輪Wrl,Wrrの内の何れか一方の車輪速度を他方の車輪速度に合わせる車輪速度調整手段を設けること。
(もっと読む)
ハイブリッド車両における駆動力伝達装置の制御方法
【課題】車両の逆走時に、2方向クラッチが急激に係合してショックの発生が発生するのを防止することができるハイブリッド車両における駆動力伝達装置の制御方法を提供する。
【解決手段】エンジンを駆動源とする前輪と、減速機付き電動モータを駆動源とする後輪を備え、電動モータの出力軸18から後輪に至るトルク伝達経路に機械式の2方向クラッチ19を組込んでエンジンによる車両の走行時に後輪から出力軸18に回転トルクが伝達されるのを防止する駆動力伝達装置において、エンジンおよび電動モータの駆動による登坂路での走行時、車両を一旦停止し、再度同方向に走行する時、自重によって車両が逆走する場合に、その逆走方向とは反対方向に電動モータを駆動させ、2方向クラッチ19のスプラグ24の係合解除トルク以上の負荷トルクを2方向クラッチ19の外輪22に負荷する。
(もっと読む)
車両の駆動力制御装置
【課題】AYC(左右輪駆動力配分手段)及びASC(駆動力制御手段)を備える車両において、旋回走行時におけるAYCの駆動力配分制御及びASCの駆動力制御を適正化し、旋回性能を向上させることのできる車両の駆動力制御装置を提供すること。
【解決手段】ASC用ECU(36)においてアンダステア状態に対するASC制御が行われると、AYC用ECU(34)に駆動力移動量制限値が与えられ、当該AYC用ECUでは駆動力移動量を抑制した制御を行う。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】主変速部と副変速部とを備えた車両用動力伝達装置の制御装置であって、その車両用動力伝達装置の耐久性の低下を抑える制御装置を提供する。
【解決手段】耐久性判断手段72は、トランスファ39で選択された変速段と車両の走行状態との関係から、トランスファ39で選択された変速段が変速機構10の耐久性を低下させる変速段であるか否かを判断する。そして、耐久性判断手段72によりトランスファ39で選択された変速段が変速機構10の耐久性を低下させる変速段である旨の判断が為された場合には、トランスファ39が自動的に変速される。従って、前記車両用動力伝達装置の耐久性すなわち変速機構10の耐久性を低下させる可能性のあるトランスファ39の変速段での走行が継続されず、変速機構10の耐久性の低下を抑えることが可能である。
(もっと読む)
作業車両
【課題】後輪のトレッド幅の調整可能な作業車両において、適正に旋回をする。
【解決手段】後輪6,6のトレッド幅広を設定するトレッド幅調整ダイヤルSW1、前記後輪6,6のトレッド調整幅に応じた前輪増速制御を実行するトレッド調整入切スイッチSW2を設け、前記トレッド調整入切スイッチSW2が入りであると、前記トレッド幅調整ダイヤルSW1の設定値に応じて、前記左右後輪6,6の調整幅の狭いときには、前記前輪5,5の切れ角が小のときに前記前輪増速制御を開始し、前記左右後輪6,6の調整幅の広いときには、前記前輪5,5の切れ角が大のときに前記前輪増速制御を開始するコントロール14を設けたことを特徴とする作業車両の構成とする。
(もっと読む)
駆動力分配装置
【課題】駆動源のトルクが常時伝達される主駆動輪と車両走行状態に応じてトルク伝達が遮断される補助駆動輪とを備えた4輪駆動車両の牽引駆動時における、補助駆動輪の駆動伝達系の過熱を抑制することができる駆動力分配装置を提供すること
【解決手段】ECUは、駆動力及び加速度に基づいて車両の牽引判定を行い(ステップ101)、牽引走行中である場合(ステップ102:YES)には、車輪速差に基づいて車両のスリップ状態判定を行う(ステップ103)。そして、車両がスリップ状態でない場合(ステップ104:YES)には、カウンタnが所定カウンタnthを超えるか否かを判定し、カウンタnが所定カウンタnthを超える場合(ステップ105:YES)には、駆動力分配装置は、トルクカップリングの伝達トルクを低減する牽引制御に移行する(ステップ108)。
(もっと読む)
駆動力制御装置
【課題】内燃機関が低回転で運転している場合に、発電手段による発電量をより確実に上昇させることのできる駆動力制御装置を提供すること。
【解決手段】エンジン10が低回転で運転をしており、オルタネータ11の発電量の制限がかかった場合において、トランスミッション17の変速比が最大の場合には、ロックアップクラッチ16を開放させる。これにより、エンジン10は、ロックアップクラッチ16によってトランスミッション17と結合されている際における回転の抵抗が低減し、回転数が上昇する。エンジン10の回転数が上昇すると、ベルト38を介してエンジン10の動力が伝達されるオルタネータ11の回転数も上昇するので、オルタネータ11による発電量を上昇させることができる。この結果、内燃機関であるエンジン10が低回転で運転している場合に、発電手段であるオルタネータ11による発電量をより確実に上昇させることができる。
(もっと読む)
4輪駆動車用駆動力配分装置
【課題】圧力センサを使用することなくクラッチ伝達トルクを推定してトルク指令値に一致するように油圧ポンプを駆動するモータの正逆回転駆動を制御する。
【解決手段】 モータ42により油圧ポンプ46を正逆転駆動し、シリンダ34に油圧ポンプ46から直接圧油を供給し、ピストン36の移動により多板クラッチ16を押付けて伝達トルクを変化させる。コントローラ40は、回転検出器48により検出したモータ40の回転速度に基づいて演算した多板クラッチ16の伝達トルクと、車両状態の検出値に基づいてクラッチトルク指令値とが一致するようにモータ40の正逆転駆動を制御する。
(もっと読む)
モータ駆動車両用制御装置及びモータ駆動車両
【課題】自己診断の誤判定を防いで車両の自己診断の信頼性を高めることができるモータ駆動車両用制御装置を提供する。
【解決手段】 前輪を駆動するエンジン2、エンジン2によって駆動される発電機7、発生した電力が供給されて後輪9a、9bを駆動するモータ4、発電機7からモータ4に供給される電流を検出する電流センサ6、検出された電流に基づいて発電機7からモータ4へ電力供給するための構成を診断する自己診断部20Aを備え、自己診断部20Aは、発電機7によって生成可能な電力の大きさと、モータ4において誘起される電圧値との少なくとも一方に基づいて自己診断が可能であるか否かを判断する。そして、自己診断が可能であると判断された場合にのみ自己診断を実行する。
(もっと読む)
電動車両の制御装置
【課題】 モータの出力トルクを用いたトルク配分制御中にバッテリ残容量が低下しモータに出力制限がかけられても、車両挙動を維持することができる電動車両の制御装置を提供する。
【解決手段】 本発明の電動車の制御装置は、第1モータ301と第2モータ308の出力トルクを用いて前後輪トルク配分を制御するトルク配分制御手段と、ヨーレートを検出するヨーレートセンサ407と、を備えた電動車両において、バッテリ301の充電状態に応じて上限バッテリ出力を設定する上限バッテリ出力設定手段を設け、トルク配分制御手段は、トルク配分制御中に第1モータ301と第2モータ308の総出力が、前記上限バッテリ出力を超える場合、ヨーレートを保持するよう第1モータ301よりも先に第2モータ308に出力制限をかけることを特徴とする。
(もっと読む)
四輪駆動車両の制御装置
【課題】パンクしたタイヤの空気圧の変化に応じて駆動力配分量を適切に制御する四輪駆動車両の制御装置を提供する。
【解決手段】主駆動輪と従駆動輪間及び左右の従駆動輪間で駆動力を配分可能な四輪駆動車両の制御装置であって、車両の運転状態を検出する運転状態検出手段と、前記一対の主駆動輪の空気圧を検出する空気圧検出手段と、予め定められた車輪の空気圧の閾値と前記空気圧検出手段で検出した空気圧とを比較する空気圧比較手段と、前記空気圧比較手段の出力に基づいて空気圧が前記閾値以下の主駆動輪を検出する空気圧異常検出手段と、前記空気圧検出手段の出力に基づいて前記一対の主駆動輪の空気圧の比を算出する空気圧比算出手段と、前記空気圧異常検出手段により空気圧の異常が検出されたとき、前記運転状態検出手段で検出した車両の運転状態及び前記空気圧比算出手段で算出した空気圧比に応じて、前記駆動力配分装置の駆動力配分量を変更する。
(もっと読む)
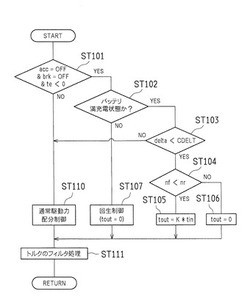
トルク配分制御装置
【課題】放熱保護制御を的確に行わせることを可能とする。
【解決手段】車両の後輪へのトルク伝達を摺動部の締結により調節可能なトルク伝達カップリング1と、摺動部の発熱状況を推定又は演算の少なくとも一方により監視する温度推定・発熱/放熱演算部81と、監視された温度状況が設定された閾値を上回るとき温度状況を下げるためにトルク伝達カップリング1の放熱保護制御を行う第1保護制御部83とを備え、第1保護制御部83は、摺動部の温度状況が閾値T2を越えるとき摺動部に働くトルクと摺動部の差回転との関係で求められる摺動部の発熱状況か放熱状況かにより摺動部を解放するか放熱保護制御を行うかを選択することを特徴とする。
(もっと読む)
駆動力制御装置
【課題】旋回加速時の車輌の挙動を安定させること。
【解決手段】車輌に要求された総駆動トルクを前軸側(前輪5FL,5FR)と後軸側(後輪5RL,5RR)とに前後駆動トルク配分比率で配分する前後駆動トルク配分手段4と、その配分された駆動トルクを同軸上における左右夫々の車輪に左右駆動トルク配分比率で配分する左右駆動トルク配分手段11と、旋回加速時に一方の軸側(後輪5RL,5RR)の駆動トルクが他方の軸側(前輪5FL,5FR)の駆動トルクよりも大きくなるよう前後駆動トルク配分手段4を制御する前後駆動トルク制御手段12aと、この前後駆動トルク制御手段12aによって大きな駆動トルクが配分された軸側の旋回外輪(右後輪5RR)の駆動トルクが旋回加速時に当該軸側の旋回内輪(左後輪5RL)の駆動トルクよりも大きくなるよう左右駆動トルク配分手段11を制御する左右駆動トルク制御手段12bとを設けること。
(もっと読む)
走行装置
【課題】懸架装置のばね上における荷重変化に起因する車両の挙動変化を抑制すること。
【解決手段】車両1のバウンシングを抑制するにあたり、前輪2の駆動力配分比αBをtanθr/(tanθf+tanθr)とし、後輪3の駆動力配分比を(1−αB)とする。また、車両1のピッチングを抑制するにあたり、前輪2の駆動力配分比αPを(h−L×h×tanθr)/(L×f×tanθf−L×r×tanθr)とし、後輪3の駆動力配分比を(1−αP)とする。ここで、θfは、前輪用懸架手段の側面視における瞬間回転中心角、θrは、後輪用懸架手段の側面視における瞬間回転中心角、hは車両1の重心高さ、Lは前輪2と後輪3との軸間距離である。
(もっと読む)
車両の駆動力配分制御装置
【課題】前軸と後軸の駆動力配分を行うにあたり、実際の走行状態に即した旋回状態の判定を行い、車両の旋回性を安定して維持する。
【解決手段】センタデファレンシャル差動制限制御部40の旋回状態判定部40bは、横加速度の絶対値が予め設定しておいた横加速度値以下で、且つ、横加速度変化率の絶対値が予め設定しておいた横加速度変化率値以下の場合に、略直進時と判定する。また、それ以外の場合、すなわち、横加速度の絶対値が予め設定しておいた横加速度値を超えている場合、或いは、横加速度変化率の絶対値が予め設定しておいた横加速度変化率値を超えている場合は、旋回状態と判定し、横加速度が正の値の場合は左旋回時と判定し、負の値の場合は右旋回時と判定する。
(もっと読む)
自動車およびその制御方法
【課題】 運転者の指示に応じて走行すると共にスリップの発生をより抑制する。
【解決手段】 高出力モード設定スイッチ89がオン状態のときには、モータMG3の定格最大トルクTm3maxをモータMG3から出力すると共に車両に要求される要求トルクT*と後輪66a,66bに出力するトルクとの差分のトルクを所定のトルク制限で制限したトルクを前輪63a,63bに出力する。これにより、後輪66a,66bに比較的大きなトルクを出力することができると共に前輪63a,63b側に出力するトルクと後輪66a,66b側に出力するトルクとの差を小さくすることができる。この結果、運転者の指示に応じて走行することができると共に高出力モード設定スイッチ89がオン状態のときのスリップの発生をより抑制することができる。
(もっと読む)
1 - 20 / 41
[ Back to top ]