
Fターム[3D043EF30]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける制御、制御対象 (1,466) | 警報、表示装置 (21)
Fターム[3D043EF30]に分類される特許
1 - 20 / 21
駆動力配分装置
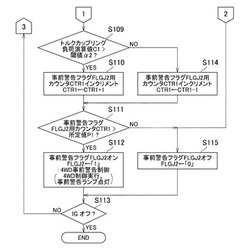
【課題】簡単な方法で、事前に運転者に負荷状態を警告することにより、4WDから2WDに切り替えた際の車両走行の安定性を向上した駆動力配分装置を提供することにある。
【解決手段】トルクカップリング負荷状態が過負荷閾値以下であり、正常負荷閾値以上の場合の回数が、所定回数以上になった場合には、過負荷警報ランプを点灯するようにしたので、運転者は前もって4WDから2WDに切り替わることが予測できる。
また、路面状態によって過負荷警報ランプを点灯する所定回数を可変としたので、例えば、低μ路などでは、所定回数を少なくして、早期に過負荷警報ランプを点灯して、運転者に注意を喚起することができる。
(もっと読む)
油圧制御装置及びそれを備えた四輪駆動車両の駆動力配分装置

【課題】電動モータの故障を高い精度で検知できると共に、電動モータの正常状態を故障と誤検知する確率を低く抑えることができるようにする。
【解決手段】モータ(電動モータ)(37)により駆動されるオイルポンプ(35)から供給される油圧によって前後トルク配分用クラッチ(10)の作動制御を行う四輪駆動車両用の油圧制御装置(60)において、モータ(37)の故障判定を行うモータ故障判定手段(50)は、モータ(37)の故障検知開始時点(t2)からモータ(37)の駆動電流値(I)を積算したモータ駆動電流積算値(Is)の算出を行うと共に、モータ故障判定用の閾値(Ith)を所定の割合で増加させる。そして、モータ駆動電流積算値(Is)が闇値(Ith)以下となった場合、故障確定タイマ(Tm2)のカウント完了を待ってモータ(37)の故障確定判定を行う。
(もっと読む)
車両用表示装置
【課題】各車輪の応答性能の見落としを抑制することで、走行中における安全性を高める。
【解決手段】本発明に係る車両用表示装置10は、車両100の走行状態を制御する走行制御基板110の制御処理に基づいて、車両100の走行状態を表示するものであって、車両100を表す車両モデル11と、車両100の車輪を表す車輪モデル13,14,15,16と、が表示される。そして、車両用表示装置10は、車輪の駆動状態の異変に応じて車輪モデル13,14,15,16の表示色を変えて表示し、異変状態が所定の時間経過後まで表示される。
(もっと読む)
駆動制御システム
【課題】電動モータに電力を供給するバッテリの残量が少なくなった状態においても、乗客の意思に基づき車両を後方へ駆動する。
【解決手段】駆動制御システム1は、バッテリの充電電圧が所定の電圧閾値以下であるとバッテリから電動モータへの電力の供給を禁止する。そして、駆動制御システム1は、シフトレバーが後方の駆動方向を指定しているときにおいて、エマージェンシースイッチが操作され、乗客に車両を駆動させたい意思があることが確認された場合には、バッテリから電動モータへの電力の供給を許容され、車両は後方に駆動する。
(もっと読む)
車両制御装置
【課題】本発明は、車両制御装置に関し、車両の制御状態について特定の走行モードの選択に伴う自動切替とスイッチ操作に伴う手動切替とで制御干渉が発生するのを防止することにある。
【解決手段】所定制御スイッチの操作により車両の制御状態を切り替える手動制御状態切替手段と、車両走行時における走行モードを選択する走行モード選択手段と、走行モード選択手段により通常走行モード以外の特定の走行モードが選択された場合に、車両の制御状態を自動的に所定の制御状態に切り替える自動制御状態切替手段と、走行モード選択手段により通常走行モード以外の特定の走行モードが選択されている場合に、手動制御状態切替手段によって特定の所定制御スイッチの操作により車両の制御状態が切り替わるのを制限する手動切替制限手段と、を設ける。
(もっと読む)
駆動力制御装置
【課題】駆動力配分を複数のモードで制御自在な駆動力配分制御装置において、ドライバの意図しないモード切替を抑制し、操作性、扱い易さを向上させる。
【解決手段】センタデファレンシャル差動制限制御部50において、モード設定部54は、基本的には、モード切換スイッチ35からの信号に従って、4WDオートモード制御演算部52か、或いは、4WDマニュアルモード制御演算部53に対して演算値の出力実行命令を出力するが、エンジン停止後は、設定されているモードを予め設定した初期モード(4WDオートモード)に自動的に変更するモードリセット機能を有する。この際、エンジン1が停止してから予め設定した時間が経過するまでは、モードリセットの変更を禁止する。
(もっと読む)
前後輪駆動車用の駆動力配分制御装置
【課題】前後輪駆動車に搭載されている前後輪に対する駆動力を配分するとともに、車両の走行安定化機能を有する駆動力配分制御装置であって、走行安定化機能を無効にされている状態で前後輪駆動モードを選択されている場合に、車両状態に異常が発生した場合、当該異常状態に対処する。
【解決手段】当該駆動力配分制御装置に、走行安定化機能を無効されている状態で前後輪駆動モードを選択されている場合に車両状態に異常が発生した場合には、車両の異常の検出に基づき走行安定化機能を有効に機能させて走行安定化機能を発揮させる制御機能を付与した。
(もっと読む)
4輪駆動車の異常検出装置
【課題】少ない部品点数でフロントデファレンシャル装置或いはリヤデファレンシャル装置のギヤ比異常を簡単に検出することができるようにする。
【解決手段】センタデファレンシャル装置5の入力側に連設する変速機2の出力軸2aに配設した車速センサ19で検出した変速機出力軸回転速度Ntoと前輪出力軸10に配設した前輪出力軸回転速度センサ20で検出した前輪出力軸回転速度Ncofとに基づき後輪出力軸6の回転速度Ncorを算出し、次いで両回転速度Ncof,Ncorの比から前後出力軸速度比εNを算出し、この前後出力軸速度比εNと各駆動輪の車輪速度に基づいて算出した前後車輪速比εvとに基づき前後デフギヤ比異常率αを算出する。そして前後デフギヤ比異常率αが許容範囲以内か否かを調べ、許容範囲から外れている場合、デフギヤ比異常と判定する。
(もっと読む)
駆動制御装置
【課題】4WD車におけるファイナルドライブへの高負荷を抑制することの可能な駆動制御装置を提供する。
【解決手段】4WDと2WDとを切り換えるトランスファを備えた車両の駆動制御装置であって、前後輪のファイナルドライブの少なくともいずれか一方の油温を検出し、該検出した油温が高温判定温度α1を越える場合に(S1〜S6)、所定のエンジン制御、好ましくは該エンジン制御による車速制限を実行する(S7)ようにしたことを特徴とする。
(もっと読む)
旋回挙動表示装置
【課題】 旋回力の制御状況を瞬時に認識できるようにする。
【解決手段】 ヨーモーメント表示部31の基準部32から旋回方向に向かうセグメント33の表示数を旋回外輪と旋回内輪のトルクの相対的な差に応じて円弧状態に増減させ、車両のヨーモーメント制御量、即ち、旋回挙動(旋回力の状態)の制御状況を直感的に視認して旋回力の制御状況を瞬時に認識することができるようにし、車両の持つ走行性能と安全性能を確実に有効活用する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】主変速部と副変速部とを備えた車両用動力伝達装置の制御装置であって、その車両用動力伝達装置の耐久性の低下を抑える制御装置を提供する。
【解決手段】耐久性判断手段72は、トランスファ39で選択された変速段と車両の走行状態との関係から、トランスファ39で選択された変速段が変速機構10の耐久性を低下させる変速段であるか否かを判断する。そして、耐久性判断手段72によりトランスファ39で選択された変速段が変速機構10の耐久性を低下させる変速段である旨の判断が為された場合には、トランスファ39が自動的に変速される。従って、前記車両用動力伝達装置の耐久性すなわち変速機構10の耐久性を低下させる可能性のあるトランスファ39の変速段での走行が継続されず、変速機構10の耐久性の低下を抑えることが可能である。
(もっと読む)
作業車の前輪増速機構
【課題】作業者が変速装置、最高速設定部材、エンジン目標回転数を設定し、走行時に前輪増速状態になっているか否かを認識することができる作業車の前輪増速機構を提供する。
【解決手段】変速操作部材である主変速レバー42・副変速レバー19、最高速設定ダイヤル40から目標車速を演算し、目標車速が設定速度以上になった場合に、前輪増速規制状態とする作業車の前輪増速機構60であって、前輪増速作動状態又は前輪増速規制状態を作業者に報知する報知手段62を有する。
(もっと読む)
車輪独立駆動車両の制御装置
【課題】原動機を制御する制御装置が正常で、ネットワークに異常がある場合でも、走行可能なフェールセーフ機能を持つ車輪独立駆動車両の制御装置を提供する。
【解決手段】原動機制御装置21,22,23,24に、車輪速から必要な算出必要出力を算出する算出手段8と、車両制御装置1からの要求必要出力が通知されない時、車輪回転用原動機31,32,33,34の制御に用いる必要出力を算出必要出力に切り替える切り替え手段10とを設け、車両制御装置1に、原動機制御装置が使用する必要出力を要求必要出力か算出必要出力かに切り替えて通知する手段12を設け、車両制御装置と所定の原動機制御装置との間の通信経路6に不具合が発生した時、所定の原動機制御装置は、要求必要出力が通知されていないことを検出した後に、算出必要出力に切り替えて車輪回転用原動機を制御する構成。
(もっと読む)
四輪駆動制御装置
【課題】エンジンで駆動される主駆動輪と、モータで駆動される従駆動輪とを有するハイブリッド四輪駆動車において、モータ駆動用インバータがその動作を停止した場合、整流器出力の直流リンク部の電圧が過剰に上昇し、周辺回路部品を損傷する問題があった。このため、電圧上昇を急速に抑える機能を有する4輪駆動制御装置の実現を目的とした
【解決手段】直流リンク部の電圧をモニタしておき、この電圧はインバータ動作停止と共に上昇し始め、予め定められた電圧に達したところで交流発電機の界磁巻線に流す電流の方向を逆転し、所定の時間流してこの電流を遮断する構成としている。これにより、インバータの動作停止後の電圧上昇を迅速に抑え、使用部品も小電力のもので済むように出来た。
(もっと読む)
四輪駆動制御装置
【課題】 主駆動輪をエンジンにより駆動させ、従駆動輪をモータにより駆動させ、このモータを駆動させる発電機をエンジンにより駆動させるようにした四輪駆動制御装置において、発電機の過剰発電によるモータの劣化を防止することができる四輪駆動制御装置を提供すること。
【解決手段】 エンジンにより駆動される主駆動輪と、モータにより駆動される従駆動輪と、前記エンジンにより駆動され、前記モータを駆動させる電力を発電する発電機と、車両の走行状態に応じて発電機の発電量を制御する発電制御信号を演算する発電制御手段と、を備え、前記発電制御手段は、発電制御信号が所定の発電閾値を超えたことを検出したときに発電を停止させる発電停止制御を実行することとした。
(もっと読む)
四輪駆動車両用制御装置のフェイルセーフ装置
【課題】 駆動力配分装置の制御装置の構成を簡素化可能な四輪駆動車両用制御装置のフェイルセーフ装置を提供することである。
【解決手段】 四輪駆動車両用制御装置のフェイルセーフ装置であって、駆動源制御装置と、駆動力配分制御装置とを備えている。駆動源制御装置は、従駆動輪を駆動する目標トルクを算出し、この目標トルクと実際に従駆動輪を駆動する実トルクとの差分を採り、この差分が所定値以上の場合に駆動力配分制御装置の故障と診断する。駆動力配分制御装置は、駆動源制御装置から送信されてくる目標トルクから実トルクを算出し、この実トルクを駆動源制御装置に送信する。
(もっと読む)
モータ駆動車両用制御装置及びモータ駆動車両
【課題】自己診断の誤判定を防いで車両の自己診断の信頼性を高めることができるモータ駆動車両用制御装置を提供する。
【解決手段】 前輪を駆動するエンジン2、エンジン2によって駆動される発電機7、発生した電力が供給されて後輪9a、9bを駆動するモータ4、発電機7からモータ4に供給される電流を検出する電流センサ6、検出された電流に基づいて発電機7からモータ4へ電力供給するための構成を診断する自己診断部20Aを備え、自己診断部20Aは、発電機7によって生成可能な電力の大きさと、モータ4において誘起される電圧値との少なくとも一方に基づいて自己診断が可能であるか否かを判断する。そして、自己診断が可能であると判断された場合にのみ自己診断を実行する。
(もっと読む)
横加速度センサの故障検知装置
【課題】誤判定のない横加速度センサの故障検知装置を提供する。
【解決手段】四輪車両1に取り付けられた横Gセンサ45により検出される四輪車両に作用する実横Gと車両状態を表す所定のパラメータから推定算出される推定横Gとの差分が所定値以上であるときに横Gセンサ45が故障していると判定する故障判定制御を行うように構成された横Gセンサ45の故障検知装置120であって、旋回走行中において旋回外輪2oの回転速度が旋回内輪2iの回転速度以下であり、且つ、実横Gが推定横Gを下回るとともに差分が所定値以上であるときに、故障判定制御を中止する。
(もっと読む)
車両の駆動力配分制御装置
【課題】 タイヤ径差の発生時、タイヤへ伝達されるトルクを制限することで走行コースをトレースできる範囲であれば、複雑な制御を必要とせず、走行・操縦安定性を確保することができる車両の駆動力配分制御装置を提供すること。
【解決手段】 前後輪と左右輪のうち少なくとも一方の駆動力配分を制御する駆動力配分制御手段を備えた車両において、各タイヤのタイヤ径差を検出するタイヤ径差検出手段(ステップS2)を設け、前記駆動力配分制御手段は、タイヤ径差検出値が、車両挙動の安定性を保つ限界値として設定されたバランスしきい値L1以上になったら(ステップS3→ステップS6)、タイヤ伝達駆動力を制限する駆動力制限制御(ステップS7)へ移行する手段とした。
(もっと読む)
自動車および交通システム
【課題】 スリップの発生をより適正に抑制する
【解決手段】 ハイブリッド自動車20から送信した路面状態を推定するための情報やデータベースに記憶されたデータに基づいて情報管理装置91が推定摩擦係数μを推定し(ステップS102〜S118)、これに基づいてスリップが発生しやすい路面状態であると判断し、さらにスリップが発生する可能性が高い走行状態であると判断したときに4輪駆動による走行を行なう(ステップS120〜S130)。これにより、スリップの発生をより適正に抑制することができる。また、ハイブリッド自動車20でスリップが発生したときはハイブリッド自動車20からスリップ情報を情報管理装置91に送信し、情報管理装置91はこれに基づいた情報をデータベースに記憶するから、推定摩擦係数μの推定を適正に行なうことができる。
(もっと読む)
1 - 20 / 21
[ Back to top ]