
Fターム[3D044AA14]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・目的 (680) | 定速走行制御の復帰(リジューム) (18)
Fターム[3D044AA14]に分類される特許
1 - 18 / 18
車両のクルーズコントロール装置
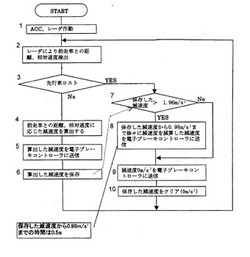
【課題】先行車ロスト時における減速度に応じて速やかに制動を解除できる車両のクルーズコントロール装置を提供する。
【解決手段】アダプティブクルーズコントローラは、追従する先行車が自車の前方からいなくなる先行車ロスト時を判定する先行車ロスト時判定手段(ステップ3)と、先行車ロスト時における減速度が所定値(1.96m/s2)より高い場合に減速度を所定の低速モードで減少させる低速モード制動解除手段(ステップ7,8,9)と、先行車ロスト時における減速度が所定値(1.96m/s2)以下の場合に減速度を所定の高速モードで減少させる高速モード制動解除手段(ステップ7,9)とを備え、低速モード制動解除手段は高速モード制動解除手段より減速度を減少させる速度が低い領域を持つ構成とする。
(もっと読む)
車両の定速走行制御システム

【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
車両制御装置
【課題】自車両が車間距離制御中又は定速走行制御中の周辺車両交通の円滑さを向上させる車両制御装置を提供すること。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置が、車間距離制御中又は定速走行中に自車両後方から自車両を追い越そうとしている車両が検出されたとき、自車両の車速を抑制する。本車両制御装置は、自車両後方に検出された後続車両が自車両と同一の車線から隣接車線へ車線変更し、且つ、当該後続車両の車速が自車両の車速より大きく、且つ、自車両と当該後続車両との車間時間が所定値以下となったとき、当該後続車両を上記自車両を追い越そうとしている車両であると判断する。
(もっと読む)
クルーズ制御装置
【課題】クルーズ制御の開始時のドライバビリティの悪化を好適に抑制することのできるクルーズ制御装置を提供する。
【解決手段】車載原動機の出力トルク(図中、実線)は、アクセルペダルの操作量に応じて設定されるペダルトルク(図中、2点鎖線)と、クルーズ制御のためのクルーズトルク(図中、1点鎖線)との大きい方によって定まる。クルーズ制御の開始時には、クルーズトルクの初期値を、車両を目標車速bにて定速走行させるために要求されるトルクとペダルトルクとの小さい方に設定する。
(もっと読む)
車両走行制御装置
【課題】 定速走行制御中において適切に変速を実行してドライバーの運転操作の煩雑化を防止する車両走行制御装置。
【解決手段】 定速走行制御時にエンジンブレーキが機能する状況になった場合、この時のエンジンブレーキ力が、調停部18が選択する定速走行制御側要求制駆動力Fctを満足できなければ、ドライバーは制動操作を行うことになる。AIシフト制御部20は、最大エンジンブレーキ力が選択制駆動力Fstのレベルに達していなければ、シフトダウンによりエンジンブレーキ力を強めて制駆動力を維持させることができる。このため目標車速Vctを維持してドライバーによるブレーキ操作等の煩雑化を防止することができる。又、カーブにおいて定速走行制御の目標車速を制限することによりドライバー操作の煩雑化と制御ハンチングを防止できる。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するのにまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者うちの小さい方を最終的な加速度上限値Aとする。S15でABが加速度上限値Aを超えていると判定する時、S16でABをAに制限するが、超えていなければ、この制限を行わない。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
作業車両の走行変速装置
【課題】クルーズコントロール状態の車速設定とその解除を容易に行える、比較的簡単な構成からなる作業車両の走行変速装置を提供すること。
【解決手段】HST64のトラニオン軸65をワイヤ53、カムプレート59などを介して回動操作して車輪2,3の回転数を変更する変速ペダル56を設け、設定されたトラニオン軸65の回動位置をワイヤ53、カムプレート59などを介して保持するためのHST(クルーズコントロール)レバー15の作動位置決めをするレバーガイド溝14bをフェンダー14に設けた。また、HSTレバー15を用いてクルージング中にブレーキペダル67を踏み込むことでHSTレバー15の保持がワイヤ68を介して解除され、HST64の出力を減速させ、車両を迅速に停止することができる。
(もっと読む)
燃料供給システムの制御装置
【課題】燃料供給ポンプの特性ずれを好適に反映して当該ポンプの燃料吐出量を精度良く制御し、ひいては排気エミッションやドライバビリティの改善を図る。
【解決手段】コモンレール12にはエンジン10に噴射供給するための高圧燃料が蓄圧されており、エンジン10の動力により高圧ポンプ13が駆動されることによりコモンレール12に燃料が圧送される。ECU20は、エンジンのアイドル運転状態で高圧ポンプ13の特性ずれ量を算出するとともに、クルーズ走行状態で高圧ポンプ13の特性ずれ量を算出する。そして、これら2点の特性ずれ量を反映して高圧ポンプ13の燃料吐出量を制御する。
(もっと読む)
車両用走行制御装置
【課題】 通常走行モードと自動走行モードの切替操作の操作性が向上した車両用走行制御装置を提供すること。
【解決手段】 車両において、運転者のアクセルペダル操作に応じた通常走行モードと運転者のアクセルペダル操作によらない自動走行モードのいずれかで車両の走行を制御する車両用走行制御装置が、アクセルペダルのストローク角を検出するペダルストローク角検出手段と、通常走行モードと自動走行モードとを切り替える走行モード切替手段とを備え、走行モード切替手段が、自動走行モードから通常走行モードへ移行してから所定時間内にペダルストローク角検出手段によりアクセルペダル不感帯内でのアクセルペダル操作が1回又は所定の複数回検出されたとき、走行モードを自動走行モードへ戻す。
(もっと読む)
エンジン出力制御装置
【課題】 シフトチェンジにおける失速あるいは急加速を防止することができる協調制御下におけるエンジン出力制御装置を提供すること。
【解決手段】 ドライバの加減速要求に応じて車両のエンジン出力を制御するドライバ要求制御手段23aと、加減速要求とクルーズコントロール要求のうち、大きい方の要求に応じてエンジン出力を制御するクルーズ制御手段22bと、車速に応じて変速段をシフトチェンジするとともにエンジン出力を制御する変速制御手段21aと、ドライバ要求制御手段23a、クルーズ制御手段22b、変速制御手段21aを優先順位に従って切り換える切換制御手段23bとを具備し、変速制御手段21aは、シフトチェンジ完了後、切換制御手段23bによりクルーズ制御手段22bに切り換えられる場合、該切り換え前にクルーズ制御手段22bに基づきエンジン出力を復帰させるようにしたことを特徴とする。
(もっと読む)
入力操作装置
【課題】 乗り物の運転操作を一層楽に行うことができる入力操作装置を提供する。
【解決手段】 車両には、片手で操舵、加減速の各種操作が可能な入力操作装置1が設置されている。車両の操舵はグリップ5をその操舵回転軸線Ls回りに回転操作することで行い、車両の加速はアーム9を介してグリップ5を操舵回動軸線Lg回りに下方へ回動するで行う。グリップ5には、減速操作時に操作する操作レバー11が配設されている。操作レバー11は自身の基端を支点として減速回動軸線Ld回りに回動可能であり、例えば右手親指で把持部5bを支えつつ他の4本の指で引き込むこと、つまりグリップ5に握り操作を付与することで回動操作が可能である。従って、車両の減速はグリップ5を握る動作により操作レバー11を手前側に回動操作することで行う。グリップ5には、オートクルーズ機能を作動させるためのオートクルーズスイッチボタン36が配設されている。
(もっと読む)
車両用走行制御装置
【課題】 定速走行制御機能を備えた車両において運転者のアクセルペダル操作に関する違和感を解消する車両用走行制御装置を提供すること。
【解決手段】 定速走行制御機能を備えた車両においてアクセルペダル反力を制御する車両用走行制御装置に、スロットルバルブ開度を検出するスロットルバルブ開度検出手段と、定速走行制御中に、アクセルペダルのペダルストローク角が所定のペダルストローク角に達したときに、アクセルペダル反力を急増させるフットレスト化手段と、定速走行制御中に上記所定のペダルストローク角を制御するフットレスト化位置制御手段とを備える。フットレスト化位置制御手段は、定速走行制御中の上記所定のペダルストローク角とスロットルバルブ開度との対応関係が通常走行時のペダルストローク角とスロットルバルブ開度との対応関係と所定の関係を有する(例えば一致する)ように、上記所定のペダルストローク角を制御する。
(もっと読む)
追従走行制御方法及び追従走行制御装置
【課題】専用スイッチを操作したりアクセルペダルに踏み換えたりすることなく、ドライバが発進意思を示し、この意思を検出した上で、先行車の発進に追従した追従走行制御の自動発進が行なえるようにし、ドライバの負担を大幅に軽減し、ブレーキングの遅れが生じたりしないようにする。
【解決手段】自車が走行停止状態に保持されているときに、先行車の発進後、ドライバがブレーキペダルの踏み増し又は踏み込みの操作で発進の意思を示すことにより、そのブレーキペダルの踏み増し又は踏み込みの操作を自車の発進操作として検出し、この発進操作の検出に基き、自車の追従走行制御の自動発進を許可し、ドライバにペダルの踏み換え等の負担をかけることなく、しかも、ブレーキングの遅れが生じたりしないようにして、ドライバの発進意思を検出した上で、先行車の発進に追従した追従走行制御の自動発進を行なう。
(もっと読む)
車両制御装置
【課題】
従来の小回り性向上を目的とした制御では、旋回時に特定の車輪に制動力を発生させて自動車の小回り性を向上しているため、自動車は減速してしまう。このため、運転者がアクセルペダル等の操作により車速を調整しないと運転者の意思に反して自動車が減速もしくは停止してしまうという課題がある。
【解決手段】
車両の各輪の制動力を独立に制御可能な制動力制御手段と、車両の旋回方向を検出する旋回方向検出手段と、車速を検出する車速検出手段と、車両の駆動力を指示する駆動力指示手段とを備え、車両の旋回方向に対して内側の車輪の制動力が、旋回方向に対して外側の車輪の制動力よりも大きくなるように各輪の制動力を制御し、さらに車速が所定値以上となるように、又は車速が所定の範囲内となるように、動力源に駆動力を指示する。
(もっと読む)
車間制御システム
【課題】通常の運転時と同様の操作で、渋滞追従処理を開始させることのできる車間制御システムを提供する。
【解決手段】渋滞道路で、運転者が自車両を発進させた場合に自車両に生じる特性値を検出したことを条件として、追従制御部10が先行車への追従制御を開始する構成とする。特性値としては、加速度または車速を用いることができる。また、渋滞道路で、運転者が自車両を発進させる操作を行った場合に、自車両のエンジンに生じる変化を検出したことを条件として、追従制御を開始するように構成することもできる。例えば、エンジン回転数の増加、吸気圧の増加、インジェクションパルス幅の増加、エンジン油圧の上昇、イグニッションパルスの増加のうちの少なくとも一つを検出したことを条件として、追従制御を開始することができる。
(もっと読む)
コンバイン
【課題】走行機体の無段階変速を円滑に行い、操作性を向上させる。
【解決手段】エンジンからの動力を、前進・後退の出力に切り換え可能な走行用油圧式動力伝達機構から左右一対の遊星歯車機構を介して左右一対の走行クローラの駆動輪へ伝達するように構成する一方、操向用の丸ハンドル47の左右旋回のための操作量に応じて出力調節可能な旋回用油圧式駆動手段を介して旋回に必要な差動トルクを左右一対の遊星歯車機構に付与する。走行速度は変速用ペダル101の踏込みと、オートクルーズセットスイッチ129のONで決定きるように構成する一方、オートクルーズ解除スイッチ130のON状態では変速用ペダル101の踏込み量に比例して、走行速度を増速・減速させることができるように制御装置103が制御する。
(もっと読む)
車両用走行制御装置
【課題】 定速走行を行う車速領域以外の車速領域において先行車追従走行および定速走行における上限車速を設定する。
【解決手段】 先行車追従走行を行う全車速領域を区分して少なくとも低速領域と高速領域を設定し、低速領域では、先行車がいるときは車間距離を保ちながら先行車に追従走行するとともに、先行車がいなくなると先行車追従走行を解除し、高速領域では、先行車がいないときは予め設定した上限車速(設定上限車速)で定速走行するとともに、先行車がいるときは設定上限車速を上限として車間距離を保ちながら先行車に追従走行する車両用走行制御装置において、高速領域以外の車速領域において設定上限車速を設定する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モード切り換え時の利便性を向上する。
【解決手段】 設定車速が設定されている場合は、車速が低速領域から高速領域に入ったときに低速追従走行モードから高速追従走行モードへ自動的に移行する。また、低速領域の追従走行モードから高速領域の追従走行モードへのモード切り換え操作履歴が記憶されている場合は、車速が低速領域から高速領域に入ったときに低速領域の追従走行モードから高速領域の追従走行モードへ自動的に移行する。
(もっと読む)
1 - 18 / 18
[ Back to top ]