
Fターム[3D044AC31]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 操舵 (65)
Fターム[3D044AC31]に分類される特許
61 - 65 / 65
4輪駆動車の制御装置
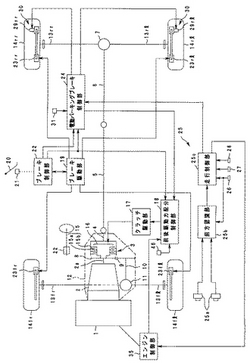
【課題】電動パーキングブレーキによって減速を行う際に問題となる、最大制動力の低さと、車両の不安定化を有効に防止する。
【解決手段】電動パーキングブレーキ制御部24は、ブレーキ制御部22から車両挙動を修正させる信号が入力されると、電動パーキングブレーキ30が作動している場合には電動パーキングブレーキ30の作動を解除し、また、主ブレーキ系統異常によるブレーキ制御量が入力されたると、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。更に、ACCシステム25から電動パーキングブレーキ30のブレーキ制御量が入力された場合には、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。そして、前後駆動力配分制御部18は、電動パーキングブレーキ30が作動している際には前軸と後軸とを直結させる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両

【課題】
運転操作補助システムを継続して使用するときでも確実に情報の伝達を行える車両用運転操作補助装置を提供する。
【解決手段】
自車両と先行車との接触の可能性が高い場合は、接触可能性を低下するように制駆動力制御とアクセルペダル反力制御を行う。システムによる制駆動力制御が継続的に行われている場合、運転者は継続的に減速感を感じるので、接触可能性の報知としての減速度の変化を感知できなくなってしまう。制動制御を開始する前には、ブレーキアクチュエータをスタンバイ状態にしてブレーキの応答性を高めているが、制駆動力制御が継続的に行われている場合はスタンバイ状態を解除する。これにより、実際に制動力が発生するタイミングを遅くして運転者に刺激を与える。
(もっと読む)
車両の自動非常制動プロセスを起動する方法及び装置
本発明は、車両の、特に大型輸送車の、自動非常制動プロセスを起動する方法及び装置に関する。これにより、車両が前方走行車両に衝突するのを回避するための、又は衝突が避けられない場合の事故を回避するための、支援機能が提供される。予め定められた警告条件(62)が満たされると、運転者に対する警告が起動される。警告条件(62)が満たされるということは、車両が前方走行車両と衝突するのを防ぐために、予設定された警告時間(tw=toa+th)後の、車両の瞬間運転状況により、自動非常制動プロセスが起動されるということを示している。瞬間運転状況は、少なくとも、車両の検出された加速度(a)、及び/又は車両と前方走行車両との間の、検出された相対加速度(arel)から得られる。  (もっと読む)
(もっと読む)
カーブ半径推定装置
【課題】自車両がこれから走行しようとする道路のカーブ半径を推定するために自車両の実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減する。
【解決手段】自車両の実車速Vnと実ヨーレートYawと実操舵角STRとに基づいて、自車両がこれから走行すべき道路のカーブ半径Ryawを推定する(S701ないしS703およびS708ないしS715)。したがって、自車両の過渡状態において実ヨーレートより正確に自車両の旋回挙動を反映し得る実操舵角を考慮しつつ、実ヨーレートを用いてカーブ半径を推定することが可能となり、よって、カーブ半径を推定するために実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減することが容易となる。
(もっと読む)
車間距離制御装置
【課題】先行車に対する車間距離制御を行う車間距離制御装置において、先行車の発進に追従して発進した際に不必要な自動減速が行われるのを防止してスムーズな発進を可能にする。
【解決手段】所定時間判定手段M9が、セットスイッチ17あるいはリジュームスイッチ18が操作されて自車が車間距離制御を開始してから所定時間内にあると判定し、かつ接近状態判定手段M8が、先行車との車間距離が車頭時間および自車の車速に基づいて設定した目標車間距離未満であると判定すると、目標車間距離設定手段M4が前記目標車間距離を車間距離検出手段M2で検出した実際の車間距離に変更するので、自車が先行車に続いて発進して車間距離制御を開始した直後に、目標車間距離と実際の車間距離との差が大きいために自動減速が行われるのを防止し、発進後のスムーズな加速を可能にしてドライバーの違和感を解消することができる。
(もっと読む)
61 - 65 / 65
[ Back to top ]