
Fターム[3D044AC31]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 操舵 (65)
Fターム[3D044AC31]に分類される特許
21 - 40 / 65
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
操舵制御装置及びバイワイヤ方式の操舵システム

【課題】 実際の操舵輪の操舵状態を知ることができ、的確な運転を可能にする操舵制御装置及びバイワイヤ方式の操舵システムを提供する。
【解決手段】 操作量検知センサS1からのステアリング操作検知信号に基づいてステアリングホイール1の操作量ωnを演算するハンドル側ECU11と、ハンドル側ECU11が演算した操作量ωnに基づいて転舵モータ4を介して転舵力伝達機構3を駆動して操舵輪2の実操舵角θnを制御する操舵輪側ECU12を備えている。また、操舵輪側ECU12は、操舵輪2の操舵角を検知する操舵角検知センサS2からの操舵角検知信号に基づいて操舵輪2の実操舵角θnを演算する。さらに、操舵輪側ECU12が演算した実操舵角θnに基づいてその時の操舵輪2の操舵状態を、モニタ装置15を介して報知させる報知ECU13とを備えている。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両の走行制御装置
【課題】車速制御と車線逸脱防止制御との協調を図る。
【解決手段】車線逸脱防止制御において、推定横変位Xsが制動制御判定用しきい値XL2以上の場合(車線逸脱傾向がある場合)、ACCによる加速制御(車速制御)よりも車線逸脱防止制御を優先して作動させる(ステップS32〜ステップS35)。一方、
所定値XL3以上の場合(XL1>|Xs|≧XL3)、すなわち車線逸脱傾向ありと判定される直前では、ACCによる加速制御を抑制する(ステップS36、ステップS37)。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】ドライバーの駐車操作を有効に支援する。
【解決手段】駐車状態判定部13cは、ナビゲーション装置12によって取得されるナビゲーション情報と、車両情報取得部11によって取得される車両情報とに基づいて、駐車を前提とする自車両の駐車状態を判定する。カメラ映像切替指令部13dは、駐車状態判定部13cによって判定された自車両の駐車状態に基づいて、表示パターンを設定し、設定された表示パターンをカメラ映像切替装置15に出力する。カメラ映像切替装置15は、表示パターンに基づいて、それぞれが車両の周囲の景色を撮像する複数のカメラ14a〜14hの中から、カメラ映像表示装置15に映像を表示するカメラの切り替えを行う。
(もっと読む)
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
車両およびその制御方法
【課題】 定速走行をより容易に迅速に行なうと共に運転状態に応じて定速走行を行なう。
【解決手段】 アクセルオンの状態からアクセルオフとしたときにそのときの車速Vを目標車速V*として設定し(S440)、車速Vが目標車速V*となるよう走行用の動力を出力するエンジンやモータを制御する。目標車速V*が設定されているときに運転者がブレーキペダルを踏み込み、その後にブレーキペダルを離したときには、そのときの車速Vを目標車速V*に設定し(S510)、定速走行を再開する。このとき、ハンドル操作が行なわれると、ブレーキペダルを踏み込む直前に設定されていた目標車速V*を再び目標車速V*として設定して(S520)、定速走行を再開する。これらの結果、定速走行をより容易により迅速に行なうことができると共に運転状態に応じて定速走行を行なうことができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】案内交差点において車両を十分快適に走行させることができるようにする。
【解決手段】現在地を検出する現在地検出部と、経路案内で案内される案内交差点における進入レーン及び退出レーンを判断するレーン判定処理手段と、前記進入レーン及び退出レーンに基づいて、案内交差点内の走行軌跡を予測する走行軌跡予測処理手段と、前記走行軌跡に基づいて車両制御を行う車両制御処理手段とを有する。進入レーン及び退出レーンに基づいて走行軌跡が予測され、走行軌跡に基づいて車両制御を行うことができる。
(もっと読む)
車両周辺視認装置
【課題】運転者が、車両の走行状態に応じて必要性の高い範囲の画像を視認することができ、不安を感じることなく、容易に、かつ、安全に運転を行うことができるようにする。
【解決手段】車両の状況を取得する状況取得装置と、前記車両の周辺を撮影する撮影装置と、該撮影装置が撮影した画像を表示する表示装置とを有する車両周辺視認装置であって、前記車両の後方の画像を前記表示装置に表示させるとともに、前記後方の画像中に前記車両の後端からの距離を表す目盛りを表示させ、前記状況取得装置が取得した車両の状況に基づいて前記目盛りの間隔を変更させる。
(もっと読む)
車両周辺視認装置
【課題】駐車の場合に車両の後方及び側方の画像を表示装置に表示させるとともに、後方の画像中には車両の後部の予測軌跡を表示させ、側方の画像中には車両の前側端部の予測軌跡を表示させることによって、車両の周辺の範囲であって駐車の際に必要な範囲の情報を的確に把握することができ、運転者が不安を感じることなく、容易に、かつ、安全に駐車を行うことができるようにする。
【解決手段】車両の状況を取得する状況取得装置と、車両の周辺を撮影する撮影装置と、撮影装置が撮影した画像を表示する表示装置とを有する車両周辺視認装置であって、状況取得装置が取得した車両の状況に基づいて駐車が行われると判定すると、車両の後方及び側方の画像を表示装置に表示させるとともに、後方の画像中には車両の後部の予測軌跡を表示させ、側方の画像中には車両の前側端部の予測軌跡を表示させる。
(もっと読む)
走行制御装置
【課題】 先行車追従走行から設定車速による定速走行への移行を、走行環境に応じて適正に行う。
【解決手段】 自車線上に先行車が検出されているときは、車間距離が目標車間距離となるように先行車に追従走行し、自車線上に先行車が検出されないときは、自車速が予め設定した車速(設定車速)となるまで目標加速度で加速して設定車速で定速走行を行う走行制御装置において、自車の横方向に発生する横加速度を検出し、追従走行中の先行車が自車線上に検出されなくなり、かつ横加速度が予め設定したしきい値を超えた場合に、設定車速への加速を抑制する。
(もっと読む)
車両用走行支援装置
【課題】 物体の種類に応じて最接近時の自車と物体との安全距離を適切に設定し、その安全距離に基づいて適切な走行支援制御を行う車両用走行支援装置を提供する。
【解決手段】走行支援制御ECUは、物体検出手段(ステップ102)が自車の進行方向の物体を検出し、物体識別手段(ステップ104)が物体の種類を識別し、安全距離設定手段(ステップ106)が物体識別手段により識別した物体の種類に応じて安全距離ΔKLを設定し、危険予測手段(ステップ108〜114)が物体検出手段により検出した物体と自車Maとの最接近時に安全距離ΔKLが確保されるか否かを予測し、走行支援制御手段(ステップ118)が、危険予測手段が物体と自車Maとの最接近時に安全距離ΔKLが確保されないと予測したときに走行支援制御を行う。
(もっと読む)
車両の減速制御装置
【課題】前車との位置関係を適正にするための減速制御を行なうものであって、前車を見失ったときに運転者に違和感の少ない制御が行なわれる車両の減速制御装置を提供する。
【解決手段】車両Xと前記車両の前方の前車Pとの位置関係を適正にするために前記車両の減速制御を行う車両の減速制御装置であって、前記前車を検出する手段を備え、前記前車を見失ったときに(S1−N)、前記前車を見失った相対的な時期を推定可能なパラメータに基づいて設定された値(S5)に応じて、前記車両に作用させる減速度を減少させる(S11)。前記パラメータは、前記車両の前方のコーナ又は前記車両が走行しているコーナの曲率又は半径である。前記曲率が大きいとき又は前記半径が小さいときには、前記曲率が小さいとき又は前記半径が大きいときに比べて、小さな割合で前記減速度を漸次減少させる。
(もっと読む)
車両のオートクルーズ装置
【課題】車両の加減速を行う車両のオートクルーズ装置において、タイヤの空気圧が低下している場合に該タイヤの劣化を抑制する。
【解決手段】車両1の走行状態が所定の目標走行状態となるように車両1を加減速させる加減速制御を行う加減速制御部30aを備える車両のオートクルーズ装置であって、車両1の少なくとも1つのタイヤ19aの空気圧に関する値を検出する空気圧センサ70aと、空気圧センサ70aの検出結果に基づいて、少なくとも1つのタイヤ19aの空気圧が所定の低下状態になったことを判定する空気圧低下判定部30bと、をさらに備え、加減速制御部30aは、空気圧低下判定部30bにより少なくとも1つのタイヤ19aの空気圧が所定の低下状態となったと判定されたときに、加減速制御における加速を中断する。
(もっと読む)
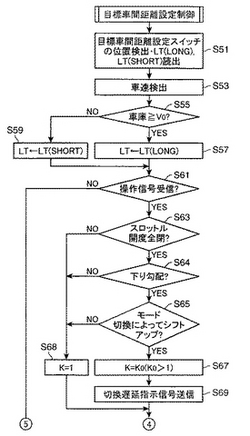
車輌用駆動力制御装置
【課題】前方の車輌との適正な車間距離を保つこと
【解決手段】前方の車輌の減速を検出し、更に自車の運転者の減速意図を検出した際、その前方の車輌との適正な車間距離を保つ為に自車の変速機4を低速段側へと変速して駆動力を制御する車輌用駆動力制御装置において、その変速機4への変速指令後で且つ当該変速機4におけるイナーシャ相の開始前までに前方の車輌の減速が検出されない場合に、その変速機4の低速段側への変速を中止させる為の手段15f,15i,15jを設けること。
(もっと読む)
旋回車速設定装置
【課題】コーナー進入時及び旋回時の適正な車速を設定すること。
【解決手段】車輌前方の道路状態を判定する前方道路状態判定手段14bと、その道路状態がコーナーと判定された場合に、このコーナーを構成するカーブのカーブ曲率半径又はカーブ曲率を求めるカーブ曲率情報算出手段14cと、その求められたカーブ曲率半径又はカーブ曲率と当該カーブ曲率半径又はカーブ曲率に応じた横方向加速度とに基づいて当該カーブの旋回車速を演算する旋回車速演算手段14dと、自車位置に対してコーナー入口側のカーブと当該カーブよりもコーナー出口側のカーブとの間における旋回車速の差を求め、その旋回車速差が当該カーブ間での許容減速度に相当する許容限界車速差よりも大きい場合に、コーナー出口側のカーブの旋回車速に許容限界車速差を加えた速度をコーナー入口側のカーブの目標旋回車速とする旋回車速補正手段14eとを備えること。
(もっと読む)
車両用安全制御装置
【課題】 車両の衝突事故等を未然に回避できる車両用安全制御装置を提供する。
【解決手段】 周辺環境検出部2によって自車両の周辺環境を検出し、他車両の自車両への衝突危険性を判定する。衝突危険性があると判定された場合には、他車両の回避を行うための回避位置を決めて、自車両がその回避位置に向かって移動できるように速度ベクトルを演算する。このときの回避位置は、道路の道幅や前方に障害物が有るか否か等に応じてパターン化しておく。そして、回避位置までの距離、回避方向、回避目標速度を求め、それを実現するための操舵量や加減速度を求め、操舵制御、ブレーキ制御もしくは駆動力制御を行うことで、自車両を回避位置まで移動させる。これにより、車両の衝突事故等を未然に回避することが可能となるか、もしくは、車両の衝突事故等を未然に防げないにしても衝突から回避できる可能性を向上させることが可能となる。
(もっと読む)
車線逸脱防止方法及びその装置
【課題】車線逸脱回避制御中に運転者がブレーキ操作をした場合に、運転者に最適なペダルフィールを与える。
【解決手段】車線逸脱防止装置は、リスク重みΔDwを設定するとともに(ステップS8)、ブレーキ操作重みΔPsを設定し(ステップS9)、それら重みΔDw,ΔPsに基づいて制御補正用重みΔCgを設定し(ステップS10)、その設定した制御補正用重みΔCgにより目標ヨーモーメントMsを補正する(ステップS11)。これにより、自車両が走行車線から逸脱する可能性が高い場合や運転者が強くブレーキ操作をした場合、車線逸脱回避制御のための制動液圧の減少傾向が小さくなり、自車両が走行車線から逸脱する可能性が低い場合や運転者が弱くブレーキ操作をした場合、車線逸脱回避制御のための制動液圧の減少傾向が大きくなる。
(もっと読む)
インターチェンジ合流支援装置
【課題】インターチェンジに合流する際のドライバーの負担を軽減すること、合流先のレーンを走行する車両との衝突を避けて安全に合流先のレーンに合流すること、合流先走行レーンを走行する後方車両をやり過ごして、その後方に生ずる空き領域にて合流する判定を行なうことができるインターチェンジ合流支援装置を提供する。
【解決手段】合流先走行レーンの後方車両距離Lrと後方車両速度Vrと前方車両距離Lfと前方車両速度Vfとを検出し、かかる検出結果より演算した目標速度Vtargetへ自車両21の車両速度Vaを制御し、さらに、合流先走行レーンに対する自車両21の位置Pxを演算し、自車両21の位置Pxをもとに演算した目標ハンドル操作角へ自車両21のハンドルの角度を制御する。
(もっと読む)
自動走行制御装置
【課題】 操縦者のブレーキ操作から反射的なものを排除し、もって、不必要な制御解除を回避すること。
【解決手段】 操縦者のブレーキ操作状態を検出する。先行車両のブレーキランプの点灯を検出する。先行車両のブレーキランプの点灯検出時点から前記ブレーキ操作状態が予め設定された厳格化要件を満たした場合にオートクルーズコントロール手段の制御解除を決定する。操縦者が内的または外的な理由で反射的にブレーキを操作した場合には、そのブレーキ操作状態から意識的な操作ではないと判断できる。そのためオートクルーズコントロールを維持することができ、不要な制御解除やそれに伴うリジューム操作を回避できる。
(もっと読む)
21 - 40 / 65
[ Back to top ]