
Fターム[3D044AC31]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 操舵 (65)
Fターム[3D044AC31]に分類される特許
41 - 60 / 65
提示装置及び情報提示方法

【課題】 操作が煩雑でなく、数多くの種類の情報から運転者が望む情報を選択可能とした提示装置及び情報提示方法を提供する。
【解決手段】 提示装置1は、車両運転者に対して複数種の情報を提示可能なものである。この装置1は、ステアリングホイール30への回転操作を検出する車両信号取得部40を有し、車両信号取得部40により検出されたステアリングホイールへの回転操作が遊びの範囲内でなされる場合、その回転操作が予め記憶した複数の操作パターンのうちのいずれに該当するかを判断する。また、提示装置1は、判断した操作パターンと対応付けられた情報を運転者に提示すべき情報であると決定し、その情報を表示部60にて表示する。
(もっと読む)
入力操作装置

【課題】 乗り物の運転操作を一層楽に行うことができる入力操作装置を提供する。
【解決手段】 車両には、片手で操舵、加減速の各種操作が可能な入力操作装置1が設置されている。車両の操舵はグリップ5をその操舵回転軸線Ls回りに回転操作することで行い、車両の加速はアーム9を介してグリップ5を操舵回動軸線Lg回りに下方へ回動するで行う。グリップ5には、減速操作時に操作する操作レバー11が配設されている。操作レバー11は自身の基端を支点として減速回動軸線Ld回りに回動可能であり、例えば右手親指で把持部5bを支えつつ他の4本の指で引き込むこと、つまりグリップ5に握り操作を付与することで回動操作が可能である。従って、車両の減速はグリップ5を握る動作により操作レバー11を手前側に回動操作することで行う。グリップ5には、オートクルーズ機能を作動させるためのオートクルーズスイッチボタン36が配設されている。
(もっと読む)
ステアリングホイールの操作装置及び車両の操作装置
【課題】 車載装置のための操作部が設けられたステアリングホイールの操作装置において、運転者の車外環境に対する視認性を阻害することなく、操作部の操作性を向上する。
【解決手段】 運転者にとって前方視認性の良いインストルメントパネル1にディスプレイ4を設け、ドーナツ型エアバッグを備えたステアリングホイールWのパッド部12の固定部22に車載装置の操作スイッチ41を設ける。該操作スイッチ41は、パッド部12の車幅方向略中央に設けられていて、前記ディスプレイ4の表示画面4a上でポインタを全方向に移動可能に構成されている。
(もっと読む)
車両用制御対象判定装置
【課題】 自車の将来の走行軌跡の信頼性が低下したときでも制御対象の誤判定の発生を防止する。
【解決手段】 レーダー装置14が自車の進行方向に存在する物体を検知した結果と、走行軌跡推定手段M1が車速およびヨーレートから推定した自車の将来の走行軌跡と、予め定められた制御対象判定条件とに基づいて制御対象判定手段M4が制御対象を判定する際に、横相対速度検出手段M3で自車に対する物体の横相対速度を検出し、推定した走行軌跡が直線状態でなく、かつ物体の横相対速度が閾値未満の場合、あるいは推定した走行軌跡が直線状態であり、かつ物体の横相対速度が閾値以上の場合に、自車から所定距離以遠の物体を制御対象から除外することで、隣車線の先行車を制御対象と誤認するのを回避することができる。
(もっと読む)
車間距離制御装置及び車間距離制御方法並びに運転操作支援装置及び運転操作支援方法
【課題】自車が置かれた周囲状況に適した運転目標計画を生成し、違和感のない運転操作を実現する。
【解決手段】現在から所定時間先までの間の予測区間において前記自車が追従すべき追従目標車両と走行すべき走行目標車線の選択と、追従目標車両及び走行目標車線の切り替えタイミングの算出とを実行する運転目標計画手段4aを有する。
(もっと読む)
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
車両制御装置
【課題】
従来の小回り性向上を目的とした制御では、旋回時に特定の車輪に制動力を発生させて自動車の小回り性を向上しているため、自動車は減速してしまう。このため、運転者がアクセルペダル等の操作により車速を調整しないと運転者の意思に反して自動車が減速もしくは停止してしまうという課題がある。
【解決手段】
車両の各輪の制動力を独立に制御可能な制動力制御手段と、車両の旋回方向を検出する旋回方向検出手段と、車速を検出する車速検出手段と、車両の駆動力を指示する駆動力指示手段とを備え、車両の旋回方向に対して内側の車輪の制動力が、旋回方向に対して外側の車輪の制動力よりも大きくなるように各輪の制動力を制御し、さらに車速が所定値以上となるように、又は車速が所定の範囲内となるように、動力源に駆動力を指示する。
(もっと読む)
コンバイン
【課題】走行機体の無段階変速を円滑に行い、操作性を向上させる。
【解決手段】エンジンからの動力を、前進・後退の出力に切り換え可能な走行用油圧式動力伝達機構から左右一対の遊星歯車機構を介して左右一対の走行クローラの駆動輪へ伝達するように構成する一方、操向用の丸ハンドル47の左右旋回のための操作量に応じて出力調節可能な旋回用油圧式駆動手段を介して旋回に必要な差動トルクを左右一対の遊星歯車機構に付与する。走行速度は変速用ペダル101の踏込みと、オートクルーズセットスイッチ129のONで決定きるように構成する一方、オートクルーズ解除スイッチ130のON状態では変速用ペダル101の踏込み量に比例して、走行速度を増速・減速させることができるように制御装置103が制御する。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、IPU5による先行車の捕捉とロストが頻繁に繰り返されている場合には、ロストカウンタCt1の作用によって判定用カウンタCt2にカウンタ値を加算し、先行車が継続的に捕捉されている場合、あるいは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt2からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt2を適切に増減させることができ、この判定用カウンタCt2が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車間距離制御装置
【課題】降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させること。
【解決手段】自車両の車速を検出する車速センサ20、及び降雨状態(雨滴量)を検出するレインセンサ50が設けられている。レインセンサ50は、雨滴量信号をコンピュータ70に入力する。コンピュータ70は、降雨状態に応じて雨滴量信号が出力されることを利用して、同一の走行状況において、晴天時における目標車間距離より長く、降雨状態に応じて異なる、降雨時における目標車間距離を設定することができる。これにより、降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させることができる。
(もっと読む)
車両の走行制御装置
【課題】 先行車両に追従する走行制御の実行状態を運転者に適切に認識させる。
【解決手段】 先行車両の検出が不可である場合、または、所定時間後にブレーキの異常状態(例えば、ブレーキパッドの過熱状態等)が発生することを示す過熱警告フラグのフラグ値が「1」である場合に、所定時間の初期値が設定された減算タイマーの作動を開始し、減算タイマーのタイマー値と共に、タイマー値の経過後に追従制御の実行が停止されることを、減算タイマーの減算が終了するまでの期間に亘って運転者に報知する。
(もっと読む)
自動車のためのブレーキシステムをコントロールするための方法及び装置
本発明は、車両が本質的に真直ぐに走行(直進走行)する走行状態が確認されること、直進走行中の車両のブレーキの片効きが確認されること、直進走行中のブレーキの片効きが認められた場合、認められた車両のブレーキの片効きが本質的に補償されるようにブレーキコントロールが修正されることを特徴とする、一定の車両減速(a)が、ブレーキコントロールへの自動的な介入によって調節可能である車速コントロールユニットを有する自動車のための液圧ブレーキシステムをコントロールするための方法に関する。 (もっと読む)
車線逸脱防止装置
【課題】運転者の心的負荷を抑えつつ、走行車線からの逸脱を防止できる。
【解決手段】車線逸脱防止装置は、感圧センサ24のセンサ値からRRI値を得て、このRRIに基づいて運転者の心的負荷を計測し(ステップS3)、その計測値に基づいて運転者の心的負荷が高まっている場合、逸脱傾向の判断に用いる設定時間TTLCを大きい値に変更する(ステップS4、ステップS5)。これにより、車線逸脱防止制御の介入時期を早くする。また、運転者の心的負荷が高まっている場合、車線逸脱防止制御のために自車両に付与するヨーモーメントや減速を小さくする。
(もっと読む)
車間距離制御装置
【課題】 車間距離制御中の減速度について車両乗員に違和感を与えない車間距離制御装置を提供すること。
【解決手段】 自車両の走行を制御することにより自車両と先行車両との車間距離を制御する車間距離制御装置において、自車両が、先行車両との車間距離が比較的短い状況下で減速を行う第一の減速状態にある場合と、先行車両との車間距離が比較的長い状況下で減速を行う第二の減速状態にある場合とで目標減速度の値及び/又は該目標減速度に到達するまでの減速度勾配の大きさを変える。先行車両との車間距離が比較的短い状況下で先行車両に不必要に接近しないようにして車両乗員の安心感を向上させるために、第一の減速状態のときに、第二の減速状態のときに比して、目標減速度を増加させる、及び/又は、減速度勾配の大きさを増加させる。
(もっと読む)
車両用走行制御装置
【課題】自車両が加速制御される場合に、走行状態に応じて応答性の良いブレーキを実現する。
【解決手段】自車速Vが所定の速度閾値VTH以下であるか、自車両が交差点及び交差点近傍の所定範囲内を走行しており、且つ追従走行制御による加速制御が行われているとき、要ブレーキ予圧発生状態であると判断し、自車速Vと目標車速Vs*とに基づいて算出される目標加減速度α*に応じてブレーキ予圧Ppを設定し、これに応じたブレーキ圧を発生させることにより、ブレーキの応答性を向上する。
(もっと読む)
車両ガイドシステム
交通状況を表す入力量(V,e1,ek,di,vri,φi)に従って,かつ動的に変化可能なパラメータに従って,車両をガイドするための操作量(am,ab)を用意する方法は,複数の入力量のセットから,唯一の評価量(g)が形成され,かつパラメータの複数のものが,同一の評価量を用いて定められることを特徴としている。 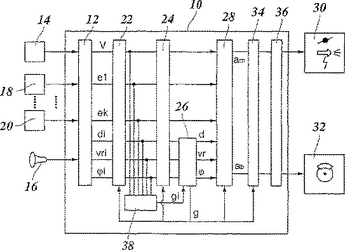 (もっと読む)
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両のリスクポテンシャルの変化を運転者にわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
先行車に対する自車両のリスクポテンシャルを算出し、複数の領域から、算出したリスクポテンシャルの領域を判定する。そして、リスクポテンシャルの領域に対応して設定した制御反発力にしたがって、自車両に発生する制駆動力を制御する。リスクポテンシャルが大きな領域ほど制御反発力を大きくする。リスクポテンシャルが領域間を遷移するときは、制御反発力を徐々に変化させ、リスクポテンシャルの大きな領域へ遷移するほど遷移状態における制御反発力の変化量を大きくする。
(もっと読む)
車線逸脱防止装置
【課題】運転者に違和感を与えることなく、車線逸脱防止制御を行える。
【解決手段】方向指示スイッチ20がオフ状態の場合、操舵介入の有無判定(ステップS11)、過去の方向指示スイッチ20の操作の有無判定(ステップS12)、過去の戻し操舵操作の有無判定(ステップS13)及び隣接車線の有無を判定(ステップS14)する。これにより、逸脱傾向があり、かつ直近に方向指示スイッチ20が操作されており、かつ戻し操舵操作されている場合、ヨーモーメントを小さくして車線逸脱防止制御を行う。
(もっと読む)
41 - 60 / 65
[ Back to top ]