
Fターム[3D044AE07]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | タイマ (29)
Fターム[3D044AE07]に分類される特許
1 - 20 / 29
車両のクルーズコントロール装置
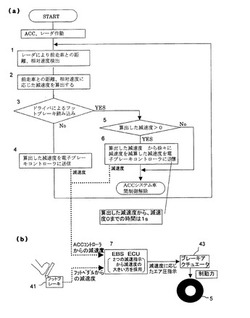
【課題】ドライバの操作に基づいてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】前走車との車間距離を維持するクルーズコントロールを行う車両のクルーズコントロール装置において、クルーズコントロール時に検出される前走車との車間距離に応じて制御減速度を算出する制御減速度算出手段(ステップ2)と、検出されるフットブレーキペダルの踏み込み量に応じて操作減速度を算出する操作減速度算出手段と、制御減速度と操作減速度のうち常に大きい減速度を選択して車両の制動を行う車両制動手段(ステップ7)と、フットブレーキ踏み込みを検出したら、所定の短時間、制御減速度をフットブレーキ踏み込みからの経過時間に応じて減少させてからクルーズコントロールを解除するクルーズコントロール解除手段(ステップ5、6)とを備えた。
(もっと読む)
車両の定速走行制御システム

【課題】 定速走行制御状態で走行抵抗の変動が生じるルートを走行する際、一定速走行機能を損なうことなく、エネルギー消費率の向上と、トルク変動ショックの抑制と、を達成することができる車両の定速走行制御システムを提供すること。
【解決手段】定速走行制御手段を備えた車両の定速走行制御システムにおいて、自車の走行ルート上での走行抵抗の変動に対し、出力トルク補正制御を行わなくても車速が許容車速内に収まると推定されるトルク制御中断領域を予め設定するトルク制御中断領域設定手段を設け、前記定速走行制御手段は、定速走行制御中、自車が設定されたトルク制御中断領域内に入ると、動力源の出力トルク補正制御による定速走行制御を中断し、自車が設定されたトルク制御中断領域を抜けると、動力源の出力トルク補正制御による定速走行制御を再開する手段とした。
(もっと読む)
作業車両の車速制御装置
【課題】 作業車両においてオートクルーズ走行が長時間にわたって過酷な作業条件のもとで継続されると、オーバヒート状態が長くなって故障を生じ易くなる。
【解決手段】 車速を一定に維持して走行するクルーズコントロール手段を備えるとともに減速指令信号を受けて所定に設定した減速状態に変更制御する作業車両の車速制御装置において、エンジンラジエータ(1)の冷却水温度を検出する手段(27)を設け、検出された冷却水温度が予め設定した温度を超えるオーバヒート域に達して一定時間を経過することによって、車速を自動的に減速するコントローラ(22)を設けることによって、自動的に車速を減速して、エンジンの負荷を過負荷にならないように維持すると共に、高出力を維持して、効率的な作業走行を行わせることができる。
(もっと読む)
鞍乗り型車両の定速走行制御装置
【課題】定速走行制御が解除されるとき、目標スロットル開度制御においてスロットル開度が運転者の予期しない値とならず、走行フィーリングを損ねることがないと共に、不要な機関出力を生じないようにした鞍乗り型車両の定速走行制御装置を提供する。
【解決手段】定速走行制御を実行する定速走行制御実行手段を少なくとも備えた鞍乗り型車両の定速走行制御装置において、実スロットル開度が指令スロットル開度APSなどから設定される目標スロットル開度となるようにアクチュエータを駆動するスロットル目標開度制御を実行するスロットル目標開度制御実行手段を備えると共に、指令スロットル開度APSと実スロットル開度TPSが所定の関係にあるか否か判定し(S60)、肯定されると共に、解除条件が成立すると判断される場合(S62からS66)、定速走行制御からスロットル目標開度制御に切り換える(S50)。
(もっと読む)
車両の走行制御装置
【課題】車両の実走行速度を目標速度に一致させるように実走行速度調節手段を制御する制御手段を備えた車両の走行制御装置において、目標速度変更スイッチにより目標速度の変更を行う場合に、目標速度がいくらに変更されたかを車両の乗員が把握し易くする。
【解決手段】乗員によるセットスイッチの操作後における目標速度変更スイッチの2回目以降の操作時には、目標速度を、目標速度変更スイッチの1回の操作毎に一定の速度だけアップ又はダウンさせる(ステップS8)一方、上記セットスイッチの操作後における目標速度変更スイッチの1回目の操作時には、目標速度を一定の速度以下の速度だけアップ又はダウンさせる(ステップS4)。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 運転者による走行制御開始要求操作を検出する走行制御開始要求操作検出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御手段と、を備える。クラッチペダル操作検出手段により運転者のクラッチペダル操作が検出されているときに走行制御開始要求操作検出手段により運転者の走行制御開始要求操作が検出された場合には、走行制御手段は走行制御を開始するとともに、回転数制御手段は内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御を開始する。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 車両に搭載された内燃機関の出力を駆動輪に伝達する手動変速手段と、その変速段を検出する変速段検出手段と、運転者によるクラッチペダル操作を検出するクラッチペダル操作検出手段と、内燃機関の回転数を検出する回転数検出手段と、車両の走行速度を検出する走行速度検出手段と、目標車速を設定する目標車速設定手段と、その出力に基づいて車両を加減速させる加減速手段とを備える。検出された変速段と走行速度に基づいて内燃機関の目標回転数を算出する目標回転数算出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には、内燃機関の回転数を目標回転数に基づいて制御を行う回転数制御手段とを備えた。
(もっと読む)
車両の制御装置
【課題】 ビジーシフトの抑制と、変速完了後に車両に発生するショックの抑制との両立を図る。
【解決手段】 クルーズ制御部は、ECT−ECUから送信されるシフト情報が5速から4速に変化して(S100にてYES)、シフト情報が変化してから時間T(1)が経過すると(S102にてYES)、4速にシフトダウンされたと判定するステップ(S104)と、アップシフト禁止制御を行なうステップ(S106)と、ECT−ECUから送信されるシフト情報が変化してから時間T(2)が経過すると(S108にてYES)、スロットル戻し制御を行なうステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
車両用速度制御装置
【課題】 車両の操作性を向上させること。
【解決手段】 車速を所定速度以下に制限する車速制限手段と、アクセル開度を検出するアクセル開度検出手段と、を備える車両用速度制御装置は、アクセル開度検出手段により検出されたアクセル開度の変化割合を算出する変化割合算出手段と、変化割合算出手段により算出された変化割合が所定割合以上であるか否かを判定する判定手段と、判定手段により変化割合が所定割合以上であると判定されたとき、車速制限手段による車速の制限を解除する制限解除手段と、を備えている。
(もっと読む)
車両およびその制御方法
【課題】 定速走行をより容易に迅速に行なうと共に運転状態に応じて定速走行を行なう。
【解決手段】 アクセルオンの状態からアクセルオフとしたときにそのときの車速Vを目標車速V*として設定し(S440)、車速Vが目標車速V*となるよう走行用の動力を出力するエンジンやモータを制御する。目標車速V*が設定されているときに運転者がブレーキペダルを踏み込み、その後にブレーキペダルを離したときには、そのときの車速Vを目標車速V*に設定し(S510)、定速走行を再開する。このとき、ハンドル操作が行なわれると、ブレーキペダルを踏み込む直前に設定されていた目標車速V*を再び目標車速V*として設定して(S520)、定速走行を再開する。これらの結果、定速走行をより容易により迅速に行なうことができると共に運転状態に応じて定速走行を行なうことができる。
(もっと読む)
車両用計器
【課題】 プッシュボタンスタートシステムを有する車両に搭載される車両用計器において、その照明機能が、スタータボタンが押された後、車両用計器の照明が点灯し、その後、突然消灯し、再び、点灯するという違和感のあるものとならないようにする。
【解決手段】 車両の各種情報を表示する文字盤7、指針8と、文字盤7および指針8を照明する照明装置9と、照明装置9の点灯および消灯を制御するメータECU6とを備える車両用計器において、プッシュボタンスタートシステムにより、イグニッションスイッチがオンとなった後、自動的に、スタータが作動して、エンジンが始動する場合では、電源ECU5から入力されるIGがONである信号と、エンジンECU4から入力されるスタータがONである信号と、スタータがOFFである信号とに基づいて、照明装置9の点灯を開始する制御を、メータECU6に実行させる。
(もっと読む)
走行制御装置
【課題】 先行車追従走行から設定車速による定速走行への移行を、走行環境に応じて適正に行う。
【解決手段】 自車線上に先行車が検出されているときは、車間距離が目標車間距離となるように先行車に追従走行し、自車線上に先行車が検出されないときは、自車速が予め設定した車速(設定車速)となるまで目標加速度で加速して設定車速で定速走行を行う走行制御装置において、自車の横方向に発生する横加速度を検出し、追従走行中の先行車が自車線上に検出されなくなり、かつ横加速度が予め設定したしきい値を超えた場合に、設定車速への加速を抑制する。
(もっと読む)
車両用制御装置
【課題】 運転者に適切な目標車間関係値を学習補正する車両用制御装置の提供を目的とする。
【解決手段】 自車と先行車との目標車間関係値を設定し、その設定値に基づく制御を自車に対して行う車両用制御装置において、運転者が前方を見ているか否かを判別可能な顔向きセンサ12を備え、前方を見ていると判別されたときにブレーキスイッチ15がオンした時(運転者によりブレーキ操作が行われた時)の実車間関係値について学習した結果に基づいて、目標車間関係値の設定値を補正することを特徴とする車両用制御装置。
(もっと読む)
内燃機関の制御装置
【課題】電子スロットルシステムに異常が生じた場合であっても、当該機関の出力の意図せぬ増大を好適に抑制することのできる内燃機関の制御装置を提供する。
【解決手段】スロットルバルブ4の実開度THは、スロットルセンサ30によって検出され電子制御装置20に取り込まれる。電子制御装置20は、実開度THを目標開度TAにフィードバック制御する。実開度THが急減するときには、点火プラグ12の遅角操作又は燃料噴射弁8による燃料カット操作を強制的に行う。
(もっと読む)
車両の運転支援装置
【課題】現状の先行車と自車両との位置関係を考慮して、先行車に近付き過ぎることなく、且つ、スムーズに自車両の先行車に対する追従走行を行う。
【解決手段】走行制御ユニット5における自動追従制御では、先行車の手前に予め確保すべき車間距離Dstopを設定し、この確保すべき車間距離Dstopに到達するまでの時間を制御目標時間t0として設定して、制御目標時間t0経過した時の先行車の予測位置Lfを演算し、現在の先行車との車間距離Lと制御目標時間t0経過した時の先行車の予測位置Lfとに基づき、制御目標時間t0経過した時の自車速Vtgtにおける先行車との車間距離を予め設定する目標車間距離Dtgtとさせる現在の自車速V0からの加速度を目標加速度aとして演算し、先行車に追従すべく自動ブレーキ制御や自動加速制御を行う。
(もっと読む)
車両用走行制御装置
【課題】 通常走行モードと自動走行モードの切替操作の操作性が向上した車両用走行制御装置を提供すること。
【解決手段】 車両において、運転者のアクセルペダル操作に応じた通常走行モードと運転者のアクセルペダル操作によらない自動走行モードのいずれかで車両の走行を制御する車両用走行制御装置が、アクセルペダルのストローク角を検出するペダルストローク角検出手段と、通常走行モードと自動走行モードとを切り替える走行モード切替手段とを備え、走行モード切替手段が、自動走行モードから通常走行モードへ移行してから所定時間内にペダルストローク角検出手段によりアクセルペダル不感帯内でのアクセルペダル操作が1回又は所定の複数回検出されたとき、走行モードを自動走行モードへ戻す。
(もっと読む)
車両衝突緩和装置および車両衝突緩和方法
【課題】 車両の衝突時におけるダメージをトータルで良好に緩和することができる車両衝突緩和装置および車両衝突緩和方法の提供。
【解決手段】 衝突時におけるダメージを緩和する車両衝突緩和装置を備えた車両では、車両と当該車両の前方に位置する前方対象物との相対速度と、車両と当該車両の後方に位置する後方対象物との相対速度とが取得され(S20)、前方対象物との相対速度に基づいて車両と前方対象物との衝突によるダメージが推定されると共に後方対象物との相対速度に基づいて車両と後方対象物との衝突によるダメージが推定され(S22)、推定された前方対象物との衝突によるダメージと後方対象物との衝突によるダメージとの総和が最小になるように車両の減速度が設定される(S24,S26,S18)。
(もっと読む)
車両用走行制御装置
【課題】 通常走行モードと自動走行モードの切替操作の操作性が向上した車両用走行制御装置を提供すること。
【解決手段】 車両において、運転者のアクセルペダル操作に応じた通常走行モードと運転者のアクセルペダル操作によらない自動走行モードのいずれかで車両の走行を制御する車両用走行制御装置が、アクセルペダル開度を検出するアクセルペダル開度検出手段と、アクセルペダル反力の大きさを制御するアクセルペダル反力制御手段と、通常走行モードと自動走行モードとを切り替える走行モード切替手段とを備え、アクセルペダル反力制御手段がアクセルペダル開度検出手段により検出されたアクセルペダル開度が所定の閾値以下のときにアクセルペダル開度に対するアクセルペダル反力特性に所定の変化(例えばクリック感)を加え、走行モード切替手段が該所定の変化に対する運転者のアクセルペダル操作に応じて走行モードの切替を行う。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モードの頻繁な切り替わりを防止する。
【解決手段】 先行車追従走行制御を行う全車速領域を複数の車速領域に区分し、各車速領域ごとに異なる追従走行モードを有し、自車速に応じて追従走行モードを切り換えながら、一定の車間距離を保って先行車に追従走行する先行車追従走行制御装置において、自車両の走行車線における走行道路の渋滞情報が検出された場合は、複数の追従走行モードの内のいずれかの車速領域を拡大する。あるいは、追従走行モードの切り換えが複数回行われたときの切り換え間隔の平均値である平均切り換え時間が予め設定したしきい値よりも短い場合は、複数の追従走行モードの内のいずれかの車速領域を拡大する。
(もっと読む)
1 - 20 / 29
[ Back to top ]