
Fターム[3D044AE14]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | 補正 (88)
Fターム[3D044AE14]に分類される特許
81 - 88 / 88
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
車両の速度制御装置

【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
電源ポジションの報知装置および方法
【課題】 走行中の窓映りなどの煩わしさを防止すると同時に、電源OFFとの誤認を防止し、電源ポジションを的確に報知することのできる報知装置および方法を提供する。
【解決手段】 車両の電源ポジションを報知する電源ポジション表示灯またはスタートスイッチ表示灯(点灯手段)を備え、エンジンの作動を検知する作動検知手段と、シフトポジションを検知するシフトポジション検知手段とを備えている。エンジンが作動していて、かつシフトポジションがPレンジまたはNレンジ以外であることが検知された場合には、電源ポジションを同じくする他の場合より、前記電源ポジション表示灯またはスタートスイッチ表示灯の照度を低下させる。
(もっと読む)
4輪駆動車の制御装置
【課題】電動パーキングブレーキによって減速を行う際に問題となる、最大制動力の低さと、車両の不安定化を有効に防止する。
【解決手段】電動パーキングブレーキ制御部24は、ブレーキ制御部22から車両挙動を修正させる信号が入力されると、電動パーキングブレーキ30が作動している場合には電動パーキングブレーキ30の作動を解除し、また、主ブレーキ系統異常によるブレーキ制御量が入力されたると、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。更に、ACCシステム25から電動パーキングブレーキ30のブレーキ制御量が入力された場合には、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。そして、前後駆動力配分制御部18は、電動パーキングブレーキ30が作動している際には前軸と後軸とを直結させる。
(もっと読む)
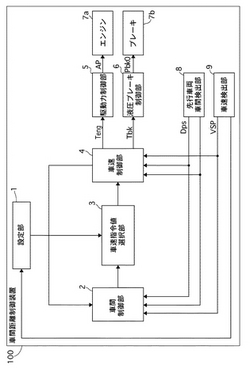
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
エンジン制御システム
【課題】 クルーズ目標車速がアイドルウォーク(アイドル目標回転数で走行できる車速)より低く設定されるとISC手段が作動してエンジン回転数がハンチングする。また、ISC手段の作動中にフィードバックの積分項がマイナス方向に過積算され、クルーズ加速要求時に加速遅れが生じる。
【解決手段】 クルーズ目標車速MSがアイドルウォークαより低く設定されると、最低車速ガードGをアイドルウォークαに引き上げて、クルーズ目標車速MSをアイドルウォークαに変更するため、エンジン回転数NEがアイドル目標回転数MIより低い回転数に低下しない。これによって、ISC手段がエンジン回転数NEをアイドル目標回転数MI以上に保とうと作用しないため、エンジン回転数NEのハンチングを防ぐことができる。また、積分項Iがマイナス方向に過積算されないため、クルーズ加速要求時に加速遅れが生じない。
(もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
81 - 88 / 88
[ Back to top ]