
Fターム[3D044AE14]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | 補正 (88)
Fターム[3D044AE14]に分類される特許
21 - 40 / 88
自動車の追従走行システム
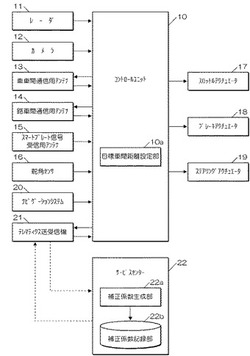
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
車両用走行制御装置

【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 車両に搭載された内燃機関の出力を駆動輪に伝達する手動変速手段と、その変速段を検出する変速段検出手段と、運転者によるクラッチペダル操作を検出するクラッチペダル操作検出手段と、内燃機関の回転数を検出する回転数検出手段と、車両の走行速度を検出する走行速度検出手段と、目標車速を設定する目標車速設定手段と、その出力に基づいて車両を加減速させる加減速手段とを備える。検出された変速段と走行速度に基づいて内燃機関の目標回転数を算出する目標回転数算出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には、内燃機関の回転数を目標回転数に基づいて制御を行う回転数制御手段とを備えた。
(もっと読む)
車両用走行制御装置
【課題】定速走行制御時に車線逸脱防止制御が作動して車両が減速した後に、再び車両が加速されるのを防ぐ。
【解決手段】定速走行制御が行われている時に、車線逸脱防止制御が作動した場合に、車線逸脱防止制御が作動した後の車速が設定速度より低い場合には、設定速度を、車線逸脱防止制御後の車速に変更する。これにより、車線逸脱防止制御が作動して、車速が低下した後に、車両が設定速度まで加速されるのを防ぐことができる。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両用表示装置及び方法
【課題】 表示の自由度を低下させ難く且つ走行状態情報の視認時間が長くなってしまうことを防止することが可能な車両用表示装置及び方法を提供する。
【解決手段】 本装置1は、表示を車両乗員の指示によらずに切り替える場合、走行状態情報の表示位置を変化させずに大きさを変化させることとしている。また、本装置1は、追加表示情報を追加して表示するときには走行状態情報の表示を確保しつつ追加表示情報を予め定められた箇所に表示することとしている。従って、表示の自由度を低下させ難く且つ走行状態情報の視認時間が長くなってしまうことを防止することができる。
(もっと読む)
車両の車線追従制御装置
【課題】 隣接車との過度な接近を防止できる車両の車線追従制御装置を提供する。
【解決手段】 自車位置よりも前方の隣接車線を走行する隣接車線先行車を検出し(ステップS1,S2)、隣接車線先行車との横偏差(車幅方向距離)を検出し(ステップS3,S7,S10,S11)と、横変位が所定量よりも小さいとき、隣接車線先行車と車幅方向に並んだ場合の横変位が、少なくとも隣接車線先行車検出時の横変位よりも長くなるように自車の走行位置を補正する(ステップS5,S9,S12)。
(もっと読む)
燃料供給システムの制御装置
【課題】燃料供給ポンプの特性ずれを好適に反映して当該ポンプの燃料吐出量を精度良く制御し、ひいては排気エミッションやドライバビリティの改善を図る。
【解決手段】コモンレール12にはエンジン10に噴射供給するための高圧燃料が蓄圧されており、エンジン10の動力により高圧ポンプ13が駆動されることによりコモンレール12に燃料が圧送される。ECU20は、エンジンのアイドル運転状態で高圧ポンプ13の特性ずれ量を算出するとともに、クルーズ走行状態で高圧ポンプ13の特性ずれ量を算出する。そして、これら2点の特性ずれ量を反映して高圧ポンプ13の燃料吐出量を制御する。
(もっと読む)
ハイブリッド車両の定速走行制御装置
【課題】 エンジン暖機前に定速走行制御に移行した際、モータを優先活用することで、総要求トルクを達成しつつ燃費性能の向上を図ることができるハイブリッド車両の定速走行制御装置を提供すること。
【解決手段】 駆動源にエンジン301と駆動用モータ303を備えると共に、ドライバーのスイッチ操作に基づき定速走行制御を行う定速走行制御手段を備えたハイブリッド車両の定速走行制御装置において、エンジン暖機状況を把握するエンジン暖機状況検出手段を設け、前記定速走行制御手段は、エンジン暖機前に定速走行制御に移行した際、総要求トルクに対するモータトルク配分をエンジントルク配分よりも多く配分する手段とした。
(もっと読む)
車両用運転支援装置
【課題】先行車を追従する車間距離制御モードにおいて、自車速を制御する際のエンジン出力変動を抑制し、安定した車速制御性を得る。
【解決手段】
エンジン1に供給する吸入空気量を可変するスロットル弁4と、吸入空気量を過給するターボ過給機5と、スロットル弁4とターボ過給機5とによりエンジン出力Tを制御して、自車速Sjを先行車との車間距離に基づいて設定した目標車速Soに収束させるエンジンECU21とを備え、エンジンECU21は、自車を先行車に追従走行させる車間距離制御モード時にターボ過給機5による過給動作を制限し、スロットル弁4の開度制御により自車速Sjを目標車速Soに収束させる。
(もっと読む)
車両の運転支援装置
【課題】自動操舵制御による制御出力トルクを適切に制限し、また、制限された状況から通常の追従操舵状態に移行した場合であってもレスポンス良く適切な制御量が得られ、精度の良い追従操舵制御を行う。
【解決手段】追従操舵制御は、自車速が高速側の車速領域の場合には、先行車と自車両の現在位置に応じて自車両の目標ヨーレートを演算し、目標ヨーレートに基づきパワーステアリング指示電流値をPID制御にて演算する。一方、低速側の車速領域の場合には、先行車と自車両の現在位置に応じて自車両の目標ステアリング角を演算し、この目標ステアリング角に基づきパワーステアリング指示電流値をPID制御にて演算する。そして、パワーステアリング指示電流値をパワーステアリング指示電流制限値で制限し、制限した場合、パワーステアリング指示電流値の積分項の絶対値の増加を禁止させる。
(もっと読む)
制動操作矯正装置
【課題】後続の車両の追突可能性や同乗者の不安を低減するために、運転者の制動操作の癖を矯正する。
【解決手段】運転者の制動操作を検知する制動操作検知手段1、2と、制動操作検知手段1、2で検知された制動操作を予め設定された制動操作モデルと比較してその制動操作モデルに対する乖離度合いを判定する乖離度合判定手段と、その乖離度合判定手段で判定された乖離度合いを記憶する乖離度合記憶手段と、その乖離度合記憶手段に記憶された乖離度合いの履歴に基づいて運転者の制動操作が適切か否かを判定する制動操作判定手段と、その制動操作判定手段で運転者の制動操作が適切でなく癖があると判定されたときに運転者に制動支援を行なう制動支援手段6とを設け、その制動支援により運転者の制動操作の癖を矯正する。
(もっと読む)
車両用速度制御装置
【課題】 車両の操作性を向上させること。
【解決手段】 車速を所定速度以下に制限する車速制限手段と、アクセル開度を検出するアクセル開度検出手段と、を備える車両用速度制御装置は、アクセル開度検出手段により検出されたアクセル開度の変化割合を算出する変化割合算出手段と、変化割合算出手段により算出された変化割合が所定割合以上であるか否かを判定する判定手段と、判定手段により変化割合が所定割合以上であると判定されたとき、車速制限手段による車速の制限を解除する制限解除手段と、を備えている。
(もっと読む)
車両およびその制御方法
【課題】 定速走行をより容易に迅速に行なうと共に運転状態に応じて定速走行を行なう。
【解決手段】 アクセルオンの状態からアクセルオフとしたときにそのときの車速Vを目標車速V*として設定し(S440)、車速Vが目標車速V*となるよう走行用の動力を出力するエンジンやモータを制御する。目標車速V*が設定されているときに運転者がブレーキペダルを踏み込み、その後にブレーキペダルを離したときには、そのときの車速Vを目標車速V*に設定し(S510)、定速走行を再開する。このとき、ハンドル操作が行なわれると、ブレーキペダルを踏み込む直前に設定されていた目標車速V*を再び目標車速V*として設定して(S520)、定速走行を再開する。これらの結果、定速走行をより容易により迅速に行なうことができると共に運転状態に応じて定速走行を行なうことができる。
(もっと読む)
車両用計器
【課題】 プッシュボタンスタートシステムを有する車両に搭載される車両用計器において、その照明機能が、スタータボタンが押された後、車両用計器の照明が点灯し、その後、突然消灯し、再び、点灯するという違和感のあるものとならないようにする。
【解決手段】 車両の各種情報を表示する文字盤7、指針8と、文字盤7および指針8を照明する照明装置9と、照明装置9の点灯および消灯を制御するメータECU6とを備える車両用計器において、プッシュボタンスタートシステムにより、イグニッションスイッチがオンとなった後、自動的に、スタータが作動して、エンジンが始動する場合では、電源ECU5から入力されるIGがONである信号と、エンジンECU4から入力されるスタータがONである信号と、スタータがOFFである信号とに基づいて、照明装置9の点灯を開始する制御を、メータECU6に実行させる。
(もっと読む)
車両用走行制御装置
【課題】 特定走行状態時には確実に車両を走行させる一方で、定常走行状態時に乗員に対する乗り心地の低下を防止しながら、車両の加減速によってドライバに違和感を覚えさせることを防止する車両用走行制御装置を提供する。
【解決手段】 定常走行状態目標加速度演算部22は、先行車両と自車両との相対距離、定常状態目標車間距離、相対速度、および所定の第一制御ゲインK11,K21に基づいて定常状態目標加速度を算出する。特定走行状態目標加速度演算部23は、先行車両と自車両との相対距離、定常状態目標車間距離より小さい特定状態目標車間距離、相対速度、および第一制御ゲインK11,K21よりも大きい第二制御ゲインK21、K22に基づいて特定状態目標加速度を算出する。選択部24は、定常状態目標加速度および特定状態目標加速度のうちの小さい方を追従用目標加速度として選択する。
(もっと読む)
車両用走行制御装置
【課題】 先行車両を追従制御するにあたり、ドライバに与える不安感を小さくするとともに、大きな減速を回避することができる車両用走行制御装置を提供する。
【解決手段】 定常走行状態目標加速度演算部21は、先行車両との車間距離Lおよび制御ゲインK1,K2等を用いて定常状態目標加速度at1を算出する。減速タイミング判断用目標加速度演算部22は、等加速度で減速した場合の仮減速タイミング判断用目標加速度at2_tmpで算出された目標加速度を算出しする。この値が所定のしきい値を未満である場合には、この値を減速タイミング判断用目標加速度at2として採用し、この値以上である場合には、予め記憶された減速タイミング判断用目標加速度最大値at2_MAXを採用する。選択部23は、定常状態目標加速度at1と減速タイミング判断用目標加速度at2の小さい方を追従用目標加速度として選択する。
(もっと読む)
追従停止制御装置及び追従停止制御方法
【課題】先行車の停止検出に基いて自車を減速停止する際に、減速度の増減変化を極力抑制し、ドライバ等に違和感を与えないようにして乗り心地を向上し、しかも、減速度の無駄な変化が極力発生しないようにする。
【解決手段】停止距離演算手段により自車1の現在の減速度に基く予想停止位置の前記先行車からの距離を予想停止車間距離としてくり返し算出し、判別手段により予想停止車間距離が先行車に近い所定の近限界停止車間距離から所定の遠限界停止車間距離までの許容範囲内か否かをくり返し判別し、前記許容範囲内の判別により自車1を現在の減速度に維持して減速し、前記許容範囲外の判別により予想停止車間距離が前記許容範囲内に入る新たな減速度を算出して自車1を前記新たな減速度で減速し、減速度の増減変化を極力抑制して自車1を追従停止制御する。
(もっと読む)
先行車追従制御装置
【課題】 設定車間距離を一時的に短縮するときに安全車間距離を確保する。
【解決手段】 先行車までの車間距離が予め設定された車間距離(設定車間距離)となるように車両の駆動手段と制動手段を制御して先行車追従走行を行う先行車追従制御装置において、車両を制動するための準備状態を検出し、この制動準備状態に応じて設定車間距離を短縮する。
(もっと読む)
走行制御装置
【課題】 先行車追従走行から設定車速による定速走行への移行を、走行環境に応じて適正に行う。
【解決手段】 自車線上に先行車が検出されているときは、車間距離が目標車間距離となるように先行車に追従走行し、自車線上に先行車が検出されないときは、自車速が予め設定した車速(設定車速)となるまで目標加速度で加速して設定車速で定速走行を行う走行制御装置において、自車の横方向に発生する横加速度を検出し、追従走行中の先行車が自車線上に検出されなくなり、かつ横加速度が予め設定したしきい値を超えた場合に、設定車速への加速を抑制する。
(もっと読む)
21 - 40 / 88
[ Back to top ]