
Fターム[3D045CC03]の内容
ブレーキシステム(液圧制御弁) (1,262) | ブレーキ力伝達型式 (167) | 液圧式ブレーキ (154) | クロス配管 (15)
Fターム[3D045CC03]に分類される特許
1 - 15 / 15
車両用制動力制御装置
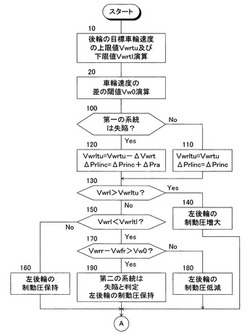
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両の制動制御装置、車両の制御装置及び車両の制動制御方法

【課題】車両を停車させる場合に車輪に対する制動力を小さくするブレーキ操作を運転手が行ったとしても、運転手の意図しない車両の移動を抑制することができる車両の制動制御装置、車両の制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に対する制動力を小さくするブレーキ操作が運転手によって行われた場合において、マスタシリンダ内のMC圧Pmcが、路面の勾配に応じた値に設定された勾配相当MC圧Pmctha以下になった第2のタイミングt12で、車輪に対する制動力を保持する第1制動制御を開始し、その後、路面の勾配が急勾配側に変化した場合に、車輪に対する制動力を増大させる第2制動制御を開始する(第3のタイミングt13)。
(もっと読む)
制動装置及び車両
【課題】制動時の車体の偏向を効果的に抑制することができる制動装置及び車両を提供することを目的とする。
【解決手段】車体と、車体に制動力を作用させる制動装置と、を有し、制動装置は、供給する油圧の差、ブレーキ性能の差等の機械的構造や、算出する式の差等の電気的設定により、初期設定として、運転手が乗車した状態で、車体の進行方向に直交する方向において、重心に近い側の制動力を、重心に遠い側の制動力よりも大きくすることで、上記課題を解決する。
(もっと読む)
車両の制動力制御装置
【課題】 車両の制動装置の大型化をすることなく、高制動負荷時の制動性能の要求に対応すべく、制動力の配分が変更されるよう構成された制動力配分制御を提案すること。
【解決手段】 本発明の制動力制御装置は、制動実行処理の間隔及び回数に基づいて高制動負荷状態であるか否かを判定する判定手段と、高制動負荷状態であるとの判定が為されたときに車両の前後輪制動力配分を変更する配分制御手段とを含む。高制動負荷状態は、例えば、所定の制動力を超える制動力を要求する制動実行処理と所定の駆動力を超える駆動力を要求する駆動実行処理とを交互に実行する場合であって、制動実行処理が所定時間より短い制動実行間隔にて所定回数を超える回数実行されたことをもって検出されてよく、前後輪制動力配分の変更は、前輪の制動力の低減と後輪の制動力の増大により為されてよい。
(もっと読む)
ブレーキ制御装置
【課題】増圧制御弁の個体差による昇圧性能バラツキに起因して、所望の制動力が得られなくなることを抑制する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。したがって、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。これにより、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。そして、第1差圧Plowを一定値にせずに、段階的に徐々に低下させていくことで、第1、第3増圧制御弁17、37の個体差に起因した発生させられる差圧のばらつきを緩増圧中に更に低減することができる。
(もっと読む)
自動車両制動装置
【課題】自動制動時における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、自動制動制御を行う際にはディスクブレーキ31に付与する油圧の調整のみで車両1の減速度の調整を行う自動制動制御部87を設ける。これにより、自動制動制御を行う場合にはドラムブレーキ35の制動力は調整しないので、制動力の制御が難しいドラムブレーキ35の制動力を調整することに起因して車両1の減速度が安定しなくなることを抑制できる。この結果、自動制動時における制動の安定性を図ることができる。
(もっと読む)
車両用制動制御装置
【課題】前後輪間の前後荷重配分比の変化に合わせたEBD制御を行うこと。
【解決手段】制動制御中の車両減速度がEBD制御開始閾値以上になった際に後輪WRR,WRLの制動力を一定に保持するEBD制御を行う車両用制動制御装置において、車両が一定車速で直進走行している状態又は停止している状態の前後輪間の前後荷重配分比の情報を取得する前後荷重配分比取得手段と、取得した前後荷重配分比が小さいほどEBD制御の開始時期を遅らせるEBD制御開始閾値の設定を行うEBD制御開始閾値設定手段と、を電子制御装置2に設けること。
(もっと読む)
制動装置
【課題】制動力を車両の対角線に配置された車輪に作用させることができるとともに、制動力を前輪制動力と後輪制動力とに配分を行うことができる制動装置を提供すること。
【解決手段】ブレーキオイルOILにマスタ圧PMCを付与するマスタシリンダ22と、FRシリンダ27aおよびRLシリンダ27bに加圧されたブレーキオイルOIL1を供給する第1系統25と、FLシリンダ27cおよびRRシリンダ27dに加圧されたブレーキオイルOIL2を供給する第2系統26と、保持ソレノイド弁25b,25cの上流側と、保持ソレノイド弁26bとFLシリンダ27cとの間とを接続する第1接続配管L18と、保持ソレノイド弁26b,26cの上流側と、保持ソレノイド弁25cとRLシリンダ27bとの間を接続する第2接続配管L28と、第1接続配管L18に設けられた第1切替弁25dと、第2接続配管L28に設けられた第2切替弁26dとを備える。
(もっと読む)
車両用制動制御装置
【課題】制動操作量に対する車両減速度の増大特性を概ね一定に維持しつつ、2系統の液圧配管の制動液圧配分を調整して車両の方向安定性を確保すること。
【解決手段】この装置は、制動操作量が微小値(「0」を含む)に達した時点から、マスタシリンダ圧に、液圧ポンプと電磁弁とにより調整される補助圧力を加えて制動圧力(ホイールシリンダ圧)を発生させる。制動操作量に基づいて補助圧力基準値が決定される。車両の荷重状態、走行状態、車輪状態等に基づいて、2系統の液圧配管で個別に補助圧力が補助圧力基準値に対して修正される。前後配管の場合、前輪系統側が増加修正され、後輪系統側が減少修正される。ダイアゴナル配管の場合、旋回外側前輪を含む系統側が増加修正され、旋回内側前輪を含む系統側が減少修正される。これにより、後輪側のコーナリングフォースが確保される等により車両の方向安定性が確保され得る。
(もっと読む)
車輌の制動制御装置
【課題】所謂X型配管の制動装置に於いて前後輪制動力配分制御中にアンチスキッド制御が行われる場合に後輪の制動圧が不必要に高くなることを防止して車輌の走行安定性を向上させる。
【解決手段】車速V及び車輌の減速度Gxbに基づき後輪の保持圧力Pcが演算され(S50〜70)、前後輪の制動力配分制御の開始条件が成立すると(S60、70)、マスタシリンダ圧力Pmと後輪の保持圧力Pcとの偏差Pm−Pcに基づき前輪の制動圧の増加圧力ΔPfが演算され(S150、160)、前輪の制動圧がマスタシリンダ圧力Pmと増加圧力ΔPfとの和になるよう制御され(S170)、後輪の制動圧が保持圧力Pcになるよう制御され(S190)、前後輪制動力配分制御中にアンチスキッド制御が開始されると(S90)、前輪の制動圧の増加圧力ΔPfが漸減され(S100、130)、後輪の制動圧の保持圧力Pcが漸増される(S180、200)。
(もっと読む)
車両およびその制御方法
【課題】後進方向に走行している際の制動時に十分な制動力を得ると共に車両の安定性を確保する。
【解決手段】車両の後進制動時には、前進制動時の前後比よりも後輪の比率が大きくなる荷重に応じた前後比をもって前後輪に制動力が付与されるよう、運転者の踏力に基づいて発生されたマスタシリンダ101のマスタシリンダ圧Pmcをポンプ115,125により加圧して後輪のホイールシリンダ109c,109dの油圧として供給すると共に減圧ソレノイドバルブ113a,123bのオン/オフ制御により減圧して前輪用のホイールシリンダ109a,109bの油圧として供給する。これにより、後進制動時には進行方向として前方に位置する後輪により大きな制動力を付与して十分な制動力を得ると共に前輪がロックするのを抑制することができる。
(もっと読む)
車両制動力制御装置
【課題】 車輪速と目標車輪速の偏差に基づき駆動力配分量を適宜変更することで、制御時における前後輪相互の干渉を抑制し、ヒルディーセント制御時における音振増加や発熱によるフェードを低減した車両制動力制御装置を提供する。
【解決手段】 4輪駆動車における各輪に設けられたホイルシリンダの液圧を制御することで所望の制動力を得る車両制動力制御装置であって、車両制動力制御装置は、ホイルシリンダの液圧を制御する液圧コントロールユニットと、前輪と後輪の駆動力を配分する駆動力配分手段と、駆動力配分手段における配分量を制御する駆動力配分コントロールユニットとを備え、液圧コントロールユニットは、各ホイルシリンダの液圧を制御し、駆動力配分コントロールユニットは、車輪速と目標車輪速の偏差に基づき駆動力配分手段における配分量を演算することとした。
(もっと読む)
制動力配分方法および車両用ブレーキ制御装置
【課題】前輪側の制動力と後輪側の制動力を配分する制動力配分方法であって、前輪の回転速度と後輪の回転速度とに不可避的な差が存在する場合であっても、前輪側の制動力と後輪側の制動力の配分を適切に調節することが可能な制動力配分方法および車両用ブレーキ制御装置を提供することを課題とする。
【解決手段】左右の後輪Rの実際の車輪速度が各々の目標車輪速度に追従するように各後輪Rに対する制動力を制御することで、後輪R側の制動力と前輪F側の制動力の配分を調節するブレーキ制御方法であって、前輪Fの実際の減速量GFR(n)と前回使用した目標車輪速度TVRR(n−1)とに基づいて今回使用する目標車輪速度TVRR(n)を算出する。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】急ブレーキ時に制動力配分制御を適切なタイミングで開始することにより、車両における走行の安定性が低下することを抑制できる車両制動制御装置及び車両の制動制御方法を提供する。
【解決手段】CPUは、各車輪の車輪速度VWを検出し、この検出結果に基づき車両の車体速度VSを検出(演算)する。そして、CPUは、車両の車体速度VSを微分することにより車体減速度DVSを検出(演算)し、この車体減速度DVSを微分することにより車体減速度微分値ΔDVSを検出(演算)する。続いて、CPUは、車体減速度微分値ΔDVSに対応する車体減速度閾値KDVSを設定し、この車体減速度閾値KDVSと車両の車体減速度DVSとを比較する。そして、車両の車体減速度DVS≧車体減速度閾値KDVSであった場合には、CPUは、ブレーキペダルの踏込み速度が速かったものと判断し、後輪の制動力を抑制すべく制動力配分制御を開始する。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】車両の特性に応じた好適な制動力配分制御を行うことにより、その車両における走行の安定性を良好に図ることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】CPUは、各車輪速度検出センサからの信号に基づき各車輪の車輪速度VWを検出し、これら各車輪速度VWに基づき、車両の車体減速度DVSを演算すると共に、後輪のスリップ率SLR及び前輪のスリップ率SLFを演算する。そして、後輪のスリップ率SLRと前輪のスリップ率SLFとの差がスリップ率閾値KS以上となった場合、CPUは後輪の制動力の上昇を抑制すべく第1制御を開始する。さらに、車両の車体減速度DVSが減速度閾値KG以上となった場合、CPUは後輪の制動力を減少させるべく第2制御を行う。
(もっと読む)
1 - 15 / 15
[ Back to top ]