
Fターム[3D046BB26]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 車両安定性 (1,438) | 路面状況対応 (248) | 路面傾斜 (66)
Fターム[3D046BB26]に分類される特許
1 - 20 / 66
車両制御装置
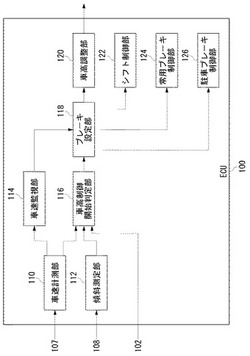
【課題】車高の調整時に車両の各部にかかる負担を軽減する。
【解決手段】車高調整手段は、車両のばね上とばね下の間に車輪毎に介装され車体と車輪の間の距離を変えることで車高を調整する。ブレーキ設定部118は、車高調整手段による車高調整の実行中に車輪の回転を許すように制動手段によって発生する制動力を低下させる。ブレーキ設定部118は、傾斜測定部112により測定された路面の傾斜の大きさに応じて異なる制動力を設定する。
(もっと読む)
電動パーキングブレーキ制御装置

【課題】坂道での停車後、早期に路面傾斜度に応じた電動パーキングブレーキの作動を行うとともに、車両の動き出しを確実に防止できる電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、車両の走行中にその走行状態に基づいて推定される動的推定路面傾斜度と、車両の停車後に車両に作用する加速度に基づいて推定される静的推定路面傾斜度とをそれぞれ求め、車両の停止後、静的推定路面傾斜度が動的推定路面傾斜度よりも大きい場合にパーキングブレーキ10の制動力を動的推定路面傾斜度に基づいて設定される制動力よりも増加させる構成とする。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】運転者の操縦技術によらず、タイヤの捻れに起因する揺り戻し挙動を低減する。
【解決手段】運転者によってブレーキペダル26に対して踏み込み操作が行われたとき、制動制御部3は、インターフェイス6を介してブレーキペダル26の踏み込み操作の検出信号を取得するとともに、車体速センサ2によって検出された車体速度に関するデータを取得し、車体速度が零になったときに、制動装置20で発生される制動力を一旦解放させる又は緩和させる制御信号を生成して制動制御油圧装置25に供給する。そして、所定期間経過したときに、制動装置20を再度作動させる制御信号を供給する。
(もっと読む)
車両運動制御装置
【課題】車両に対する障害物を事前に判断し、様々な走行情報を加味して回避走行全般に亘り、ドライバの操作、意志を的確に反映して自然に各車両挙動の制御装置が適切に動作し、障害物の回避走行を適切に行う。
【解決手段】路面摩擦係数、路面勾配の路面情報、自車両と障害物の相対的な運動を考慮し自車両が制動操作のみで障害物を回避できるか判定し、自車両の障害物に対する回避操作の状態を判定する。そして、自車両の制動操作のみで障害物を回避できない場合で且つ自車両の障害物に対する回避操作が行われている際、ハンドル操作と車両挙動に応じ回避走行モードに移行する。回避走行モード中はハンドル操作と車両挙動の変化に応じ必要な制御を車両挙動制御部に実行させ、回避走行モードの解除はドライバのハンドル操作による回避走行終了を検出し、或いは、障害物回避後の車両挙動の安定を検出し行う。
(もっと読む)
制動制御装置
【課題】先行車追従制御によって自動停車する際の液圧式ブレーキの負担を軽減した制動制御装置を提供する。
【解決手段】制動制御装置を、先行車の走行状態に応じて液圧式ブレーキ70を制御し、車両を自動停止させる追従走行制御部91と、追従走行制御部91による車両の自動停止を、車両の停止前に検出する自動停車検出部41aと、自動停車検出部41aによる自動停止の検出に応じて、電動アクチュエータ20による機械式ブレーキ10の解除状態から制動状態への駆動を、車両の停止前に開始させる機械式ブレーキ制御部40とを備える構成とする。
(もっと読む)
車両の操舵制御装置
【課題】停車時、及び、走行時の必要なときに確実にブレーキ力を発生して車両の停車状態維持、及び、自動ブレーキ走行を行う。
【解決手段】操舵制御装置23は、平坦路において、補助ブレーキスイッチ39がONされた時、或いは、補助ブレーキスイッチ39がOFFでパーキングブレーキ非作動でエンジン非稼働時には補助ブレーキが作動し、前輪をトーアウト、後輪をトーインとする。坂道においては、補助ブレーキスイッチ39がONされた時、或いは、補助ブレーキスイッチ39がOFFでパーキングブレーキ非作動で停車時には、前輪若しくは後輪駆動車においては非駆動輪を対象として、4輪駆動車においては後輪を対象として補助ブレーキが作動される。そして、補助ブレーキスイッチ39がOFFされた時、パーキングブレーキが作動された時、アクセルペダルが踏み込まれた時には補助ブレーキが解除される。
(もっと読む)
自動二輪車用ブレーキ制御装置
【課題】ABS制御の精度を維持しつつ後輪浮き上がりの判定精度を高めることが可能な自動二輪車用ブレーキ制御装置を提供する。
【解決手段】制御装置20Aは、前輪車輪速度を取得する前輪車輪速度取得手段21と、後輪車輪速度を取得する後輪車輪速度取得手段22と、前輪車輪速度及び後輪車輪速度を用いて推定車体速度を算出する推定車体速度算出手段23と、前輪車輪速度のみを速度要素として用いて推定車体減速度を算出する推定車体減速度算出手段24と、推定車体速度に基づいて、前輪及び後輪について制動時のスリップを抑制するABS制御手段25と、推定車体減速度が基準減速度よりも高減速である状態が基準時間以上持続した場合に、少なくとも後輪浮き上がりのおそれがあると判定する後輪浮き上がり判定手段26と、少なくとも後輪浮き上がりのおそれがあると判定された場合に、前輪の制動力を減少させる前輪制動力制御手段27と、を備える。
(もっと読む)
車両の駆動力制御装置
【課題】一定の車速で坂を下るために自動的に制動力が働く制御装置を備え、複数の車輪に駆動力を分配する車両において、その制動力で車輪がロックするのを回避しつつ、車速が上がってしまうことを防止することができる駆動力制御装置を提供する。
【解決手段】車両の駆動力制御装置は、予め設定された車速で走行するため、制動力が与えられる前輪5、後輪10の車輪速を検出し、車輪速が下限しきい値以下となったら、前輪5および後輪10に駆動力を配分する四輪駆動状態から、前輪5に駆動力を配分する二輪駆動状態に移行して、前輪5がロック状態となるのを回避しつつ、車体速の上昇を抑制する。
(もっと読む)
車両の制動力保持装置、及び車両の制動力保持状態の解除方法
【課題】各車輪に対する制動力の保持状態を解除させる際において、斜面での車両発進時における車両安定性の低下を抑制できる車両の制動力保持装置、及び車両の制動力保持状態の解除方法を提供する。
【解決手段】ヒルホールド制御の実行中にアクセルぺダルが踏込み操作された場合には、停止している路面の斜度grを検出し、該検出結果に基づき各車輪から上側車輪と下側車輪とをそれぞれ設定する。そして、まず上側車輪に対応するホイールシリンダ内のブレーキ液圧を減圧させる。その後、上側車輪に対応するホイールシリンダ内のブレーキ液圧の減圧が開始されてからの経過時間T1が経過時間閾値KT1以上になった場合には、下側車輪に対応するホイールシリンダ内のブレーキ液圧を減圧させる。
(もっと読む)
車両制御装置
【課題】制動状態を保持された車両が坂路をずり落ちながら姿勢変化し始めた場合にその車両の姿勢変化を抑制することが可能で、かつ誤動作しにくい車両制御装置を提供する。
【解決手段】制動状態の保持が行なわれているときに(S5)、坂路をずり落ちる車両の姿勢変化を検出すると(S4)、制動保持制御による制動状態の保持を解除する(S10)。また、制動保持制御によって制動状態の保持が行なわれているときに(S5)、ドライバによるステアリング操作を検出すると(S6)、坂路をずり落ちる車両の姿勢変化の検出感度を高くする(S9)。
(もっと読む)
車両制御装置
【課題】制動状態を保持された車両が坂路をずり落ちながら姿勢変化し始めた場合に、その姿勢変化を抑制することが可能な車両制御装置を提供する。
【解決手段】制動保持制御によって制動状態が保持されているときに、坂路をずり落ちる車両の姿勢変化を検出すると(S8)、制動保持制御による制動状態の保持を解除し(S9)、さらに、車両を変化前の姿勢に戻す操舵方向にステアリングホイール(34)を回転させる(S13)。
(もっと読む)
上り坂上一時停止時に後退が抑止される車輌
【課題】車輪と路面の間の摩擦係数の把握精度の限界に対処し、上り坂での一時停止からの発進時に駆動輪に路面に対するグリップ限界越えを起こさせないよう、駆動力を優先的に使用して車輌を上り坂にて一時停止状態に保持する。
【解決手段】車輌が上り坂にて一時停止したとき、車輌の後退を抑止するために駆動輪に付与する駆動力と各輪に付与する制動力の大きさを車輪と路面の間のグリップ限界の大きさの推定に基づいて制御し、グリップ限界に対し残す余裕の大きさまたは比率を全ての車輪に於いて一様にする。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。このときに、道路勾配の状況に応じて制動パターンを変更する。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを道路特性情報に応じた適切な制御タイミングで作動させる。
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
(もっと読む)
傾斜判定方法、電動パーキングブレーキ制御方法、傾斜判定装置、及び、電動パーキングブレーキ制御装置
【課題】車両の停止時に早期に傾斜判定を行うことができる傾斜判定方法等を提供する。
【解決手段】車両が停止する路面の傾斜を判定する傾斜判定方法を、車輪の回転を検出する車速センサ61の出力に基づいて、減速時における車速の低下率を検出する車速低下率検出ステップS06と、車両の前後方向の加速度を検出する加速度センサ43の出力を車速の低下率と比較して傾斜を判定する傾斜判定ステップS11,S21とを備える構成とする。
(もっと読む)
4輪駆動車両の制御装置
【課題】坂路に駐車した場合の車両保持性能を向上させることができる4輪駆動車両の制御装置を提供する。
【解決手段】シフトセレクタのシフトレンジがPレンジにある駐車条件が成立して前輪のパーキングロックが行われている場合は、車両が駐車している路面の勾配θが−θ0≦θ≦θ0の設定範囲内にあるか否かが判定される(ステップS102)。路面勾配θが設定範囲から外れる場合は、後輪と連結されたモータの回転子の回転をロックするようモータの巻線に電流を流すことで後輪のロックを行い(ステップS103)、路面勾配θが設定範囲内にある場合は、後輪のロックを行わない(ステップS104)。
(もっと読む)
自動車およびその制御方法
【課題】発進時のブレーキの引きずりによる異音の発生を抑制する。
【解決手段】停車中に運転者がブレーキペダルを離してもブレーキ圧を保持する制御を行なっている最中に発進要求がなされてブレーキの解除指示がなされたときには、待ち時間tbがブレーキ圧が充分低くなる時間trefを経過しておらず、アクセル開度Accや勾配θがそれぞれ所定の閾値より小さく迅速に駆動軸から動力を出力する必要がないときには(ステップS100〜S130)、運転者の駆動要求に基づくトルクTrtmpになまし処理を施したトルクを要求トルクTr*として設定し(ステップS150,S160)、設定した要求トルクTr*を用いてエンジンの目標回転数Ne*などを設定する(ステップS170〜S220)。こうすれば、運転者による駆動要求より小さい動力を駆動軸に出力することができ、ブレーキの引きずりによる異音の発生を抑制することができる。
(もっと読む)
車両用走行制御装置
【課題】車両が走行路から逸脱した場合に車両の横転傾向を抑制するよう車両を制御する車両用走行制御装置を提供することを目的とする。
【解決手段】車両用走行制御装置1は、車両の走行状態を検出する車両走行状態検出手段10と、車両が走行路から逸脱したか否かを判定する逸脱判定手段11と、逸脱判定手段11により逸脱が検出された車両の位置する地面の勾配θを検出する勾配検出手段12と、勾配検出手段12が検出した地面の勾配θと、車両走行状態検出手段10が検出した車両の走行状態とに基づき車両の横転傾向を判定する横転判定手段13と、横転判定手段13により横転傾向と判定された場合に、車両の走行を制御する走行制御手段14とを備える。
(もっと読む)
車輌の電子制御ブレーキ装置
【課題】坂道等に於ける駐停車時に運転者の制動要求が生じてもその要求が確実に満たされるようにする。
【解決手段】制動装置10と、運転者によるブレーキペダル12の操作に応じて電気的に制動装置を制御する電子制御装置とを有する車輌の電子制御ブレーキ装置。ストロークセンサ46により検出されるブレーキペダルのストローク等に基づき運転者による制動要求を判定し(S40、90)、イグニッションスイッチ58の状態等に基づき車輌の駐停車状態を判定し(S30、70、80)、運転者による制動要求がなく且つ車輌が駐停車状態にある状況が所定の時間継続したか否かを判定し(S60、110)、運転者による制動要求がなく且つ車輌が駐停車状態にある状況が所定の時間継続した後に電子制御ブレーキ装置及び各センサの作動を解除する(S120、130)。
(もっと読む)
上り坂での一時停止時に後滑りを抑止される車輌
【課題】オートマチックトランスミッションのクリープ作動を伴う原動機の駆動力と制動装置の制動力による上り坂での車輌一時停止時の後滑り抑止に於ける長所と短所に鑑みて更に改良された車輌を提供する。
【解決手段】上り坂に於ける一時停止中、駆動力制御装置により制御された駆動力と制動力制御装置により制御された制動力とにより後滑りが抑止されるとき、後滑り抑止用制動力の大きさに上限を設定する。上限値は上り坂勾配が大きい程大きくされ、また上り坂勾配が大きい程駆動力による抑止力を大きくさせるよう設定されてよい。
(もっと読む)
1 - 20 / 66
[ Back to top ]