
Fターム[3D046GG10]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | ステアリング装置 (217)
Fターム[3D046GG10]に分類される特許
61 - 80 / 217
センサ付車輪用軸受
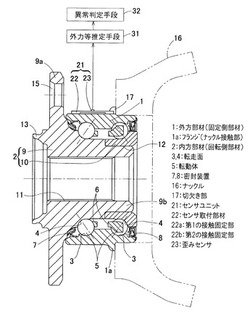
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。外方部材1は、ナックル16と接触するナックル接触部1aの一部に切欠き部17を有する。
(もっと読む)
車両の運動制御装置

【課題】アクセル,ステア,ブレーキ操作についての具体的な制御タイミングの指針を明確化し、これに基づいた運動制御を行える車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。
(もっと読む)
車両挙動制御装置
【課題】車両の進行方向に対して左右に傾斜した路面において、横加速度を検出するセンサが重力加速度の影響を受けた場合であっても、車両の挙動を適切に制御する。
【解決手段】操舵角θhを検出する操舵角センサ7と、車速Vを検出する車速センサ9と、横加速度Gyを検出する横加速度センサ11と、線形路面反力トルクTalign_linを演算する線形路面反力トルク演算器18と、路面反力トルクTalignを検出する路面反力トルクセンサ8と、旋回力の飽和を判定する旋回力飽和判定器19と、第1および第2目標ヨーレートγ_tag1、γ_tag2を演算する第1および第2目標ヨーレート演算器16、17と、車両目標ヨーレートγ_tagを決定する目標ヨーレート決定器20と、実ヨーレートγを検出するヨーレートセンサ10と、車両目標ヨーレートγ_tagと実ヨーレートγとから車両挙動を制御する挙動制御手段とを備えている。
(もっと読む)
障害物回避制御装置及び障害物回避制御プログラム
【課題】最大車体加速度内で最短距離で障害物を回避する制御力の方向を演算する。
【解決手段】相対速度の車体前後方向の成分vx、最大車体加速度Gref、及び障害物を回避するための車体横方向距離Ye'で定めたパラメータ√(GrefYe')/vx、及び相対速度の車体横方向の成分vy、最大車体加速度Gref、及び車体横方向距離Ye'定めた第2のパラメータvy/√(GrefYe')、障害物を回避するための車体発生力の方向θの関係を定めたマップを記憶し、自車両と障害物との間の距離、及び自車両の障害物に対する相対速度を検出し、検出された距離及び前記相対速度に基づいて、パラメータを演算し、演算されたパラメータ及びマップを用いて車体発生力の方向θを導出する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】交通流をスムーズにするような運転操作を促す車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と先行車との余裕時間と車間時間とを用いて先行車に対する接近度合を表すリスクポテンシャルを算出する。トンネルに進入する場合やトンネルから出る場合等、運転者が自然と減速や加速をすることが予測される場合に、リスクポテンシャルを補正する。補正したリスクポテンシャルに基づいてアクセルペダルから発生させる操作反力を算出することにより、リスクポテンシャルを知らせながら交通流をスムーズにするような運転操作を促す。
(もっと読む)
車両運動制御装置及び制御方法
【課題】左右同舵角の操舵のみ行える操舵機構を有する車両にも操舵−制駆動統合制御が適用できるようにする。
【解決手段】目標車体フォース及びモーメントを達成するための各輪発生力を演算し、各輪タイヤの最大発生力を表す各輪摩擦円の大きさと各輪の前後力とから前後力を摩擦円の大きさで規格化した前後μ利用率を演算し、各輪の前後μ利用率、各輪横力、及び各輪接地荷重に基づいて、左右同一の操舵角を演算し、演算された操舵角に基づいて、車両運動を制御する。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御において常にμ利用率の上限を最小にする。
【解決手段】各輪タイヤの最大発生力を表す各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力と各輪のμ利用率の上限値に対する割合を表す各輪利用率とを演算し、演算された各輪タイヤ発生力に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御する。
(もっと読む)
衝突判定装置
【課題】自車両と他車両との衝突が発生する可能性の有無を精度良く判定する。
【解決手段】時間遅れ補正部23は、第1他車両状態抽出部21により抽出された他車両の走行状態に係る走行状態量(例えば、相対速度等)と、第2他車両状態抽出部22により抽出された自車両の走行状態に係る走行状態量(例えば、相対速度等)とを比較し、この比較結果に基づき、通信装置14を介して他車両から受信した車両状態量の時間遅れ量を算出する。時間遅れ補正部23は、設定した時間遅れ量によって、第2他車両状態抽出部22により抽出された他車両の状態に係る他車両状態量を補正する。危険度判定部24は、補正された他車両状態量に基づき、他車両の進行軌跡および走行挙動を予測し、自車両の走行に対する他車両の危険度を判定する。
(もっと読む)
車両用支援制御装置
【課題】運転者の障害物回避行動の意図を反映させつつ、緊急回避が必要と判断されたときに、その運転者の障害物回避行動による制御から緊急回避制御への切り替えを迅速に行うことのできる車両用支援制御装置を提供する。
【解決手段】本発明の車両用支援制御装置は、障害物の回避操作時に運転者の操舵量に応じて車両の操舵系を駆動する通常時車両操舵手段10Dと、障害物の位置と自車両の走行状態とに基づいて通常時車両操舵手段10Dによる回避制御によっては障害物の回避を不能と判断したときに緊急事態として運転者の障害物回避行動を反映させつつ障害物回避制御を行う緊急時障害物回避手段6とを備えている。
(もっと読む)
回避操作算出装置、回避制御装置、各装置を備える車両、回避操作算出方法および回避制御方法
【課題】自車両のタイヤのグリップ力の最大値を超える力を車両に作用させることなく、制動制御および操舵制御により自車両が障害物を回避することができる運転操作量を算出する回避操作算出装置を提供する。
【解決手段】本発明の回避操作算出装置10は、車両12よりも前方の道路13上に存在する障害物14を検出する障害物検出手段と、車両12の走行状態を検出する自車情報検出手段と、該自車情報検出手段および前記障害物検出手段からの検出情報に基づいて車両12が障害物14を回避するための回避操作量を生成する回避操作量生成手段30とを備える。回避操作量生成手段30は、車両12に生じる加速力、減速力および横力の合成力が車両12のタイヤ33のグリップ力の最大値よりも小さくなる範囲内で回避操作量を算出する。
(もっと読む)
車両制御装置及び方法
【課題】運転のし易い車両特性が得られるようにした車両制御装置を提供する。
【解決手段】運転者の前方注視点位置を推定あるいは検出し(100)、推定あるいは検出された前方注視点位置に基づいて、前方注視点位置までの距離が長くなるにしたがって、運転者のハンドル操作量に対するヨーレートの応答を表わす伝達関数に含まれる時定数が長くなるように車両特性を設定し(102)、設定された車両特性が得られるように車両を制御する(104、106)。
(もっと読む)
回避操作算出装置、回避制御装置、各装置を備える車両、回避操作算出方法および回避制御方法
【課題】走行している道路の走行可能な範囲を考慮しつつ障害物の回避を行うことができる運転操作量を算出する回避操作算出装置を提供する。
【解決手段】車両12が走行する道路13およびその境界部29を検出する道路境界検出手段と、道路13上に存在する障害物14を検出する障害物検出手段と、車両12の情報を検出する自車情報検出手段と、道路13上で障害物14を回避するための操作量を算出する回避操作算出手段28とを備える。
(もっと読む)
車両の走行制御装置
【課題】先行車両に追従走行するときドライバのフィーリングにあった警報タイミングで警報を発する事ができる車両の走行制御装置を提供する。
【解決手段】本発明の車両の走行制御装置は自車両の速度を検知する自車両速度検知手段12と、自車両の先行車両を認識する先行車両認識手段14と、この先行車両認識手段が認識した先行車両と自車両との車間距離を検知する車間距離検知手段14と、自車両と先行車両との目標車間距離を設定する目標車間距離設定手段6cと、この目標車間距離を維持するように自車両を先行車両に対して追従走行させる追従走行手段2,4,16と、目標車間距離よりも短い警報作動しきい値を設定すると共に車間距離検知手段により検知された車間距離が警報作動しきい値以下になったときに警報をドライバに報知する警報手段4,18と、を有し、警報手段は警報作動しきい値を自車両速度検知手段により検知された自車両速度に応じて変更する(図5のa1,b1,c1)。
(もっと読む)
運転者状態判定装置および車両の走行安全装置
【課題】運転者の状態を適切かつ高精度に判定すると共に、接触回避動作の実行以後において車両を適切に走行させる。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容の少なくとも何れかを設定し、接触回避動作として自車両の加速制御または減速制御または操向制御を実行する。運転者状態判定部28は、接触回避動作の作動以後の所定時間内に運転者による所定操作量以上の運転操作が入力されたか否かの判定結果に応じて運転者の状態(例えば、運転に適さない状態等)を検知する。
(もっと読む)
運転支援装置
【課題】接触回避動作の実行以後での自車両の姿勢状態を適切な状態に設定する。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容(例えば、減速制御時の減速度等)の少なくとも何れかを設定可能である。走行制御部26は、接触回避動作の実行に応じて自車両の姿勢状態が変化した場合には、姿勢戻し制御を実行し、EPSアクチュエータ17による自車両の操舵機構の操向動作によって、自車両の姿勢状態が、例えば接触回避動作の実行開始前後の所定期間内において車両状態センサ16により検出された自車両の姿勢状態に応じた所定の目標状態となるように制御する。
(もっと読む)
運転支援装置
【課題】接触回避動作の実行以後での自車両の姿勢状態を適切な状態に設定する。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容(例えば、減速制御時の減速度等)の少なくとも何れかを設定可能である。走行制御部26は、接触回避動作の実行に応じて自車両の姿勢状態が変化した場合には、姿勢戻し制御を実行し、EPSアクチュエータ17による自車両の操舵機構の操向動作によって、自車両の姿勢状態が、例えば自車両の進行方向前方に存在する他車両の車両状態(例えば、姿勢状態や進行方向や走行軌跡等)に基づき設定される姿勢状態に応じた所定の目標状態となるように制御する。
(もっと読む)
運転支援装置
【課題】前進する際の車両の走行履歴に基づいて後退時の車両操作の支援を行うことによって、後退が困難な状況下でのより容易な車両の運転を可能とした運転支援装置を提供する。
【解決手段】車両2が細街路又は駐車場内に進入した際に、後方カメラ3で撮像した撮像画像50から障害物の特徴点60を検出するとともに検出結果に基づいて車両2の走行軌跡75を検出して保存し(S2〜S5)、車両2が細街路又は駐車場内で後退を行う際には、保存された走行軌跡75に沿って車両2が後退すべく車両の制御を行う(S17)ように構成する。
(もっと読む)
車両の横転防止装置
【課題】簡単な制御及び構成によって横転防止の効果を得る。
【解決手段】横転防止装置1は、パワーステアリング装置2が搭載された車両に設けられ、ロール状態判定部3と、操舵アシスト力低減手段4とを備える。パワーステアリング装置2は、操舵アシスト力を付与することにより操舵操作を補助する。ロール状態判定部3は、車両が横転する可能性が高いか否かを判定し、車両が横転する可能性が高いと判定したときに横転警報信号を出力する。操舵アシスト力低減手段4は、ロール状態判定部3から横転警報信号を受信したとき、パワーステアリング装置2が付与する操舵アシスト力を低減させる。
(もっと読む)
車両制御装置
【課題】制動状態を保持された車両が坂路をずり落ちながら姿勢変化し始めた場合に、その姿勢変化を抑制することが可能な車両制御装置を提供する。
【解決手段】制動保持制御によって制動状態が保持されているときに、坂路をずり落ちる車両の姿勢変化を検出すると(S8)、制動保持制御による制動状態の保持を解除し(S9)、さらに、車両を変化前の姿勢に戻す操舵方向にステアリングホイール(34)を回転させる(S13)。
(もっと読む)
車両用制動力制御装置
【課題】この発明は、障害物との接触を避けるための制動力を低減するときに、旋回性能に悪影響を与えることがなく、操縦性を向上させることができ、障害物を回避するための制動力制御と、高い操縦性とを両立することを目的とする。
【解決手段】この発明は、障害物検知手段と、障害物との接触が避けられるかどうかを判定する判定手段と、障害物との接触予測時間を算出する予測時間算出手段と、接触予測時間まで、車両を一定の制動力で制動する制動力制御手段とを備えた車両用制動力制御装置において、ステアリングの操舵量を検出する操舵量検出手段を備え、接触予測時間を経過した場合には、制動力が低減時間内にゼロになるように徐々に低減する制動力低減制御手段を備え、操舵量に応じて、低減時間の値を変化させる低減時間補正手段を備えている。
(もっと読む)
61 - 80 / 217
[ Back to top ]