
Fターム[3D046GG10]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | ステアリング装置 (217)
Fターム[3D046GG10]に分類される特許
1 - 20 / 217
駐車支援装置
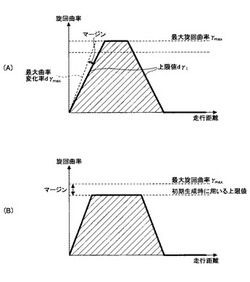
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
車両の運転支援装置

【課題】現在のみならず将来予測される危険度を考慮して最適な回避ルートを通過するように制御して安全性を向上させる。
【解決手段】制御ユニット5は、自車両1の周辺に存在する白線、ガードレール、側壁、及び、立体物のそれぞれを対象として、現在のトータルリスク関数を設定し、各対象の位置の時間的変化を予測してトータルリスク関数の時間的変化を予測して、このトータルリスク関数の時間的変化を基に各時間毎の自車位置におけるY軸方向の極小点を演算する。そして、各時間毎の目的関数を作成し、該目的関数を最小とする各時間毎の旋回制御量を自車両の旋回制御量として演算して、自車両が各時間毎の旋回制御量で移動したときの各ルート毎のリスク関数を設定し、各ルート毎のリスク関数から最終的な回避ルートを選択し、最終的な回避ルートに基づいて操舵制御、及び、ブレーキ制御を実行させる。
(もっと読む)
車両用衝突予防安全装置、衝突予防安全システム、及び衝突予防安全情報センター
【課題】適切な頻度で衝突回避のための動作を行なうと共に処理負荷を軽減することが可能な車両用衝突予防安全装置等を提供すること。
【解決手段】自車両の進行方向に存在する交差点に自車両の進行方向と交差する方向で接近する所定接近車両を検知する所定接近車両検知手段(30)と、所定接近車両検知手段により検知された所定接近車両について、衝突危険性に関する所定の判定を行なう判定手段(66)と、を備え、判定手段の判定結果に基づいて、衝突回避のための所定動作を行なう車両用衝突予防安全装置(11)であって、所定接近車両検知手段により所定数以上の所定接近車両が検出された場合には、衝突回避のための所定動作を行なわないことを特徴とする。
(もっと読む)
車両用運転支援装置
【課題】操作ミスを犯した場合にも、衝突をより確実に回避し得る車両用運転支援装置を提供する。
【解決手段】車両用運転支援装置において、障害物を検出する障害物検出手段と、上記障害物検出手段による障害物の検出結果に基づき、自車両と障害物との衝突可能性を判定する衝突可能性判定手段と、上記衝突可能性判定手段により衝突可能性があると判定された場合に、衝突を回避するよう車両制御する衝突回避手段と、上記衝突回避手段による車両制御に関連したドライバの操作状態を検出するドライバ操作状態検出手段と、ドライバの運転姿勢を検出する運転姿勢検出手段と、上記ドライバの運転姿勢に応じて、上記自動衝突回避手段による車両制御及びドライバ操作状態検出手段により検出されたドライバによる操作制御のいずれかから優先する制御を判定する優先制御判定手段と、を設ける。
(もっと読む)
産業車両の走行制御装置
【課題】走行状態中に運転者が離席した場合であっても、走行安定性の低下を抑制しつつ、回生制動によって停止距離の低減を図ること。
【解決手段】走行状態中に運転者の離席を検出した場合は回生制動を掛け、その際には車両の状態に応じて回生制動の強さを変更するように制御する。この制御は、回生制動の強さに対し、荷重の条件と、揚高の条件と、ティルト角の条件を予め対応付けておく。具体的に言えば、揚高については低揚高よりも高揚高の方が回生制動の強さを弱くし、ティルト角については後傾側よりも水平・前傾側の方が回生制動の強さを弱くする。これにより、回生制動は、車両の状態に応じた強さで掛けられ、車両の走行安定性の低下が抑制される。また、回生制動により、車両の停止距離の低減が図られる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材に設けた副操作部材の操作でヨーモーメント発生装置の作動を制御するものにおいて、副操作部材が出力する指令信号のノイズの影響を低減する。
【解決手段】 運転者がステアリングホイール7に設けたグリップ9L,9Rを操作すると、そのグリップ9L,9Rの操作に応じてヨーモーメント発生装置が車両のヨーモーメントを変化させるので、ステアリングホイール7を操作して車両の運動状態を制御するのと同時並行して、車両の旋回を補助あるいは抑制することができる。このとき車速の増加に応じてグリップ9L,9Rの操作量に対するヨーモーメントの変化量を変更するので、運転者によるステアリングホイール7の保持力や操作力が増加するためにグリップ9L,9Rの操作にノイズが乗り易くなっても、そのノイズの影響を最小限に抑えてヨーモーメント発生装置が不適切なヨーモーメントを発生するのを防止することができる。
(もっと読む)
加速度演算装置および電気式動力舵取装置
【課題】加速度センサを用いることなく車両の前後方向の加速度を正確に演算し得る加速度演算装置および電気式動力舵取装置を提供する。
【解決手段】駆動輪である右前輪FR、左前輪FLの各原車輪速度を検出する車輪速度センサFRs、FLsと、従動輪である右後輪RR、左後輪RLの各原車輪速度を検出する車輪速度センサRRs、RLsとを備えて、ABS制御中であると判定された場合、全ての車輪(FR、FL、RR、RL)の各車輪速度(規制後車輪速度V1fr、V1fl、V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算し、ABS制御中でないと判定された場合、従動輪(RR、RL)の各車輪速度(規制後車輪速度V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算する。そして、このように演算される車両速度Vspdに基づき車両の前後加速度Gsを演算する。
(もっと読む)
車両負荷制御装置
【課題】 制御の起動トリガが故障した場合であっても、制御を継続可能な車両負荷制御装置を提供する。
【解決手段】 運転者による運転状態を検出する運転状態検出手段と、車両状態を制御する負荷と、負荷の制御量を演算する第1制御手段と、第1制御手段により演算された制御量に基づき負荷を駆動する第2制御手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第1起動信号を伝達する第1通信手段と、第1制御手段と第2制御手段とを接続し、第1制御手段から第2制御手段に対し第2起動信号を伝達する第2通信手段と、第2制御手段に対し電流を供給する電源と、第2制御手段と電源とを接続する電源リレーと、第2制御手段に設けられ、電源リレーを通電側に保持する電源保持手段とを備え、第2制御手段は、第1起動信号と第2起動信号を監視する。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
制動制御システム
【課題】ブレーキペダルが操作されたときに、路面状態に応じた最適な制動制御を迅速に実施すること。
【解決手段】ブレーキペダルが操作されたときに複数の車輪14の各々に与える制動力を車輪14毎に独立して制御する制動制御システム200において、路面状態推定部は、車輪14と路面との間の摩擦係数を算出する。制動制御部104は、右輪と路面との間の摩擦係数である右側摩擦係数と左輪と路面との間の摩擦係数である左側摩擦係数との差に基づいて、制動距離短縮制御および車両姿勢安定化制御のどちらかを、ブレーキペダルが操作されたときに実施するものとして、ブレーキペダルが操作されていないときに予め設定する。ブレーキペダルが操作されたときに、制動距離短縮制御および車両姿勢安定化制御のうち予め設定されているものを実施する。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両挙動制御装置
【課題】回転半径短縮制御が作動した場合でも最適なトラクション制御を行うことができる車両挙動制御装置を提供することを課題とする。
【解決手段】車両の旋回性能を向上させるために左右輪の駆動力差により旋回制御(回転半径短縮制御)を行う第1駆動力制御手段と、左右輪の駆動力差が異なる場合に駆動力差を減少させるトラクション制御を行う第2駆動力制御手段とを備える車両挙動制御装置において、第1駆動力制御手段による旋回制御がされるときは第2駆動力制御手段によるトラクション制御を抑制することを特徴とする。
(もっと読む)
運転支援装置
【課題】過去の運転者の車両操作と対応付けて記憶された車両状況から今後の運転者が行う車両操作を予測することにより、現在の状況に応じた適切な走行を行わせることを可能とした運転支援装置を提供する。
【解決手段】自車両の前方を走行する前方車両が検出された場合に、学習システムを起動させて自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し(S5、S6)、運転者の車両操作と対応付けて累積的に学習情報DB8に記憶させる(S8)とともに、一方で、その学習結果と現在の車両状況とから運転者が今後に車線変更の運転操作を行うか否かを予測し(S14)、車線変更の運転操作を行うと予測された場合にはレーンキープアシスト制御やクルーズコントロール制御等の車線変更を妨げる制御を抑制する(S16)ように構成する。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
車両の走行制御装置
【課題】先行車両追従中の車両がハンチングを起こすことを抑制する。
【解決手段】本発明は、自車両前方を走行する先行車両の車速を測定する先行車車速測定手段を有し、前記先行車車速測定手段が測定した車速に基づいて自車両と先行車両との間の車間距離を予め設定された設定車間距離と略同一になるように該自車両を加減速制御する車両の走行制御装置であって、前記先行車車速測定手段が測定した車速の規定時間あたりの変化の程度を算出する車速変化算出手段を有し、前記車速変化算出手段が算出した規定時間あたりの車速の変化程度が所定の変化程度に比べて大きいとき、先行車両との間の車間距離を設定車間距離と略同一になるために必要な加速量または減速量に比べて小さい加速量または減速量で自車両の走行を制御することを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】車両旋回時に旋回内輪となる側の車輪ブレーキを、アンダーステア状態を解消すべく作動せしめるようにした車両の運動制御装置において、アンダーステア制御と同時に減速制御を行う際に、車両の安定性を確保したまま車体減速度を高める。
【解決手段】ブレーキトルク配分決定手段60は、要求ヨーモーメント演算手段58で得られた要求ヨーモーメントならびに要求減速度演算手段59で得られた要求減速度に基づいて左右前輪のうち旋回内輪および左右後輪のブレーキトルク配分を定め、ブレーキトルク上限値決定手段61は、車輪加速度から車体加速度を減算して各車輪毎の加速度差を算出し、その加速度差および各車輪のブレーキトルクに基づいて定めたブレーキトルク補正値によって車輪がロック状態に陥ることを回避し得る上限のブレーキトルクを定め、ブレーキトルク配分手段60でのブレーキトルク配分量の上限値を定める。
(もっと読む)
運転支援装置および運転支援方法
【課題】前方車の挙動情報から、障害物を避ける自車の回避運転を支援する運転支援装置および運転支援方法を提供する。
【解決手段】運転支援装置10は、フロントカメラ24、通信装置26を介した車車間通信等により前方車の挙動情報を取得し、前方車が進路を変更して障害物を避ける回避運転をしていると判定すると、自車の運転者が自車の進路を変更して障害物を避けることができるかを判定する。運転支援装置10は、自車の運転者が進路を変更して障害物を避けることができる場合には、ディスプレイ28、警告装置30により自車の運転者に回避運転を案内させ、自車の運転者が進路を変更して障害物を避けることができない場合には、自車の車両制御装置40に自車が障害物との衝突を避ける回避運転を支援させる。
(もっと読む)
車両の制御装置
【課題】「或る制御手段による制御対象の基本制御」と「他の制御手段による基本制御を修正する修正制御」との制御干渉を抑制すること。
【解決手段】この装置は、車両の制御対象の基本制御量を決定するための演算を行う1つ又は複数の第1制御部A11〜A1iを有し前記第1制御部の演算結果に基づいて前記基本制御量を決定する第1制御手段A1を備えた第1制御ユニットU1と、前記基本制御量の修正に使用される前記制御対象の修正制御量を決定するための演算を行う1つ又は複数の第2制御部A21〜A2jを有し前記第2制御部の演算結果に基づいて前記修正制御量を決定する第2制御手段A2を備えた前記第1制御ユニットとは独立した第2制御ユニットU2とを備える。前記基本制御量に基づく基本制御と前記修正制御量に基づく修正制御とが制御干渉し得る場合、前記第1制御部の全て又は一部の制御機能を停止する。
(もっと読む)
車両挙動制御装置
【課題】制駆動力限界付近においてもドライバの意図する車両の加減速性と旋回性を実現する各車輪の制駆動トルクを演算すること。
【解決手段】車両挙動情報、車両外界情報に基づいて車両の目標挙動制御量を演算する手段と、ドライバの加減速要求と旋回要求を検出し、これらをドライバ要求量として演算する手段と、目標挙動制御量とドライバ要求量から、目標加速度と目標ヨーモーメントを演算し、これらを実現するように各車輪の目標制駆動力を演算し、各車輪の制駆動トルクを制御する装置において、目標ヨーモーメントに対する目標加速度の優先度を加速度優先度として、ドライバ要求量と目標挙動制御量に基づいて演算し、各車輪に対し制駆動力上限値と下限値を演算する手段を備えて、少なくとも一輪の目標制駆動力が制駆動力上限値又は下限値を超える場合、制駆動力上限値と下限値、加速度優先度に基づいて各車輪の目標制駆動力を演算すること。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
1 - 20 / 217
[ Back to top ]