
Fターム[3D046GG10]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | ステアリング装置 (217)
Fターム[3D046GG10]に分類される特許
201 - 217 / 217
動的なステアリング・リコメンデーションによる電気機械式ハンドル操作装置

【課題】動的なステアリング・リコメンデーションによる電気機械式ハンドル操作装置を提供する。
【解決手段】この電気機械式ハンドル装置は、検出された車両パラメータから導き出される不安定な運転状況中にこの運転状況に応じて重畳ステアリングモーメント(ME )を生成し、車両を安定化するためのステアリング・リコメンデーションが、重畳ステアリングモーメントを通じてハンドル(1)で体感的に運転者に知らされる。データが、基準支持特性曲線に規格化されたインターフェースを通じてハンドル操作装置に転送される。これによって、その都度のハンドル操作装置の支持特性曲線に適合されたステアリング・リコメンデーションを生成するために、ハンドル操作装置外部でのデータ生成時の変更が必要でない。重畳ステアリングモーメントの生成時の調整経費が削減される。
(もっと読む)
車両の障害物接触時挙動制御装置

【課題】 障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、運転者の安全性をより高レベルで確保することができる車両の障害物接触時挙動制御装置を提供すること。
【解決手段】 自車と障害物との相対関係により自車が障害物への接触回避可能であるか否かを判定する接触回避判定手段と、自車が障害物への接触回避不可能であると判定された場合、自車の障害物に対する接触時挙動を制御する接触時挙動制御手段と、を備えた車両において、自車の助手席に乗員が存在しているか否かを判定する助手席乗員判定手段を設け、前記接触時挙動制御手段は、自車が障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、助手席側から障害物に接触するように車両にヨーモーメントを発生させる手段とした。
(もっと読む)
車輌の運動制御装置
【課題】ヨーモーメント及びステアリングギヤ比の両者を制御することによって車輌のヨーレートと車輌の横加速度とのバランスを適正に制御し、車輌の走行運動の制御性を向上させる。
【解決手段】左操舵角θ及び車速Vに基づき車輌の目標ヨーレートγtが演算され(S20)、実ヨーレートγを目標ヨーレートγtに追従させると共に実ヨーレートに対する車輌の横加速度Gyの応答遅れをなくす(車輌のスリップ角βを0にする)ための目標ステアリングギヤ比Nt及び目標ヨーモーメントMtが演算され(S40)、目標ヨーモーメントMtを達成するための左右前輪の目標制駆動力Xfl、Xfrが演算され(S50)、ステアリングギヤ比Nが目標ステアリングギヤ比Ntになるようステアリングギヤ比可変装置24が制御され(S60)、左右前輪の制駆動力が目標制駆動力Xfl、Xfrになるよう制御される(S70)。
(もっと読む)
自動車の制動制御装置
【課題】
本発明は、各輪の制動力発生装置の一部に故障が発生した場合において、上記のような運転者の誤判断があった場合でも、自動車を安全に停止できる可能性を拡大することを目的とする。
【解決手段】
運転者のブレーキ操作量または操作力若しくは他の制御装置からの要求に応じて、自動車の各輪に設けられた制動力発生部を独立に制御する自動車のブレーキシステムにおいて、前記制動力発生部が故障した場合は、前記自動車の動力源の出力,動力原から車輪に動力を伝達する駆動力伝達機構の変速比または変速段、及び自動車の車速の少なくとも一つに制限をかけるとともに、当該制限の内容を故障した制動力発生部の数及び位置に応じて異ならせる。
(もっと読む)
車両の挙動推定方法
【課題】 車両の横転可能性を迅速に且つ正確に、しかも容易に推定すること。
【解決手段】 車両の挙動推定方法は、車両に発生するヨーレイトγ及びロール角φを計測し(ST09)、このヨーレイトに対するロール角の微分値f’を算出し(ST10)、この微分値が予め設定された推定しきい値LM2を超えた場合に、車両が横転する可能性のある運転状態であると推定する(ST13)方法である。推定しきい値は、ヨーレイトから算出されたヨー角加速度dγに対して相関関係にあり、このヨー角加速度が大きいほど小さくなる値である(ST11,ST12)。ヨーレイトに対するロール角の微分値と推定しきい値とを比較するタイミングは、ロール角が予め設定された基準最大ロール角LM1を一旦超えた後である(ST02)。
(もっと読む)
自動車の乗用車の安定化方法
【課題】 トレーラを牽引する自動車における安定性を改善する方法を提供する
【解決手段】 自動車(1)、特に乗用車により牽引されるトレーラ(2)を有する自動車(1)の安定化方法において、自動車(1)が、ヨー速度偏差の評価によって横揺れ運動に関してモニタリングされ、前記横揺れ運動が検出されたとき、自動車(1)に、その横揺れ運動に対してほぼ逆位相であるほぼ周期的なヨー・モーメントが自動的に発生される。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサの出力を制御量として入力してアクチュエータの操作量を決定し、決定した操作量に基づいてアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、複数個のセンサの出力を変数として入力し、制御システムのアクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサ出力を制御量として入力してアクチュエータの操作量を決定してアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、検出されたヨーレートと、予め設定された規範ヨーレートとのヨーレート偏差を算出するヨーレート偏差算出部102と、センサ出力と算出されたヨーレート偏差を変数として入力し、アクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両用内輪空転防止制御装置
【課題】 フィードバック制御に伴う過渡応答や振動等を発生させることなく、旋回内輪空転を未然に防ぐことができる車両用内輪空転防止制御装置を提供する。
【解決手段】 ブレーキペダルの操作とは独立して各車輪のブレーキ液圧を可変するブレーキアクチュエータ6と、ステアリングギア比を可変する前輪操舵アクチュエータ5と、を備えた車両用内輪空転防止制御装置において、内輪が空転するかどうかを予測する内輪空転判断手段と、内輪が空転すると判断されたとき、ブレーキアクチュエータ7に対し、各車輪のブレーキ圧を増大させるブレーキ液圧指令値を出力するとともに、前輪操舵アクチュエータ5に対し、ステアリングギア比をより大きくするギア比可変指令値を出力する内輪空転防止制御手段と、を設けた。
(もっと読む)
動的な軸重移動を補償する方法
本発明は、車両の荷重の一部が少なくとも一方の前輪の上に偏るときの動的な軸重移動を少なくとも部分的に補償する、改善された方法を提案する。まず、軸重移動を補償するために、駆動トルク要求が与えられ、したがって、時間制限付きのほぼ最大の駆動トルクが要求される。さらに、本発明は、特許請求の範囲に記載の方法を実施するマイクロプロセッサ及び制御装置を初めて提案する。本発明は、このタイプの制御装置又はプロセッサが取り付けられる車両駆動装置にも関する。本方法を実施するソフトウェアも記載される。最後に、本発明は、特許請求の範囲に記載の方法を実施するソフトウェアを実行するために、このタイプの制御装置又はマイクロプロセッサを備える自動車に関する。 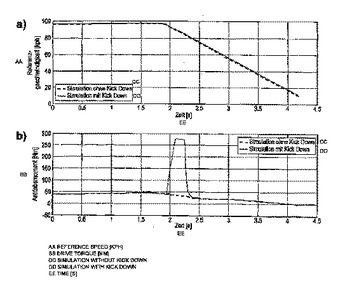 (もっと読む)
(もっと読む)
バイラテラルサーボ制御装置
従来の力帰還型あるいは並列型バイラテラルサーボ構成に必要なマスタの位置(回転運動においては角度)センサと力(回転運動においてはトルク)センサを互いに冗長センサとして使用する。力帰還型あるいは並列型バイラテラルサーボにおいて、故障したセンサを他のセンサにより代替してスレーブの目標位置(角度)を決定することができるため、制御動作を継続することができる。また、本来はバイラテラルサーボのために備えたセンサを冗長センサの代わりに活用するので、より低いセンサの冗長度で所定の信頼度を有する制御装置が実現可能となる。 (もっと読む)
自動車の運転者への警告方法および警告装置
自動車の運転者への警告方法および装置が提案され,この場合,対象検出器が設けられて,前を走行する車両を検出して,自己の車両に対する間隔と相対速度を求めて評価装置へ供給する。評価装置(1)は,前を走行する車両(13)が減速(a1<0)を実施すると仮定して,さらに対象検出器によって検出された変量と運転者の反応時間および自己の最大可能な車両減速にしたがって,前を走行する車両との衝突が回避できるかを求める。衝突が回避できないことが認識された場合に,運転者警告装置が活性化される。 (もっと読む)
プリセーフシステムを装備した自動車
本発明は、自動車の少なくとも1つの周囲認識装置(4)及び運転状況データ検出装置(5)によって受信された情報に従って作動されるアクティブ及び/又はパッシブセーフティ装置(13、14)を備え、前記情報はデータ評価装置(10)によって分析される、プリセーフシステム(2)を装備した自動車(1)に関する。アクティブ及び/又はパッシブセーフティ装置(13、14)の少なくとも1つの要素は、自動車の周囲認識装置(4)の情報が潜在的な衝突物を示すと、及び運転状況データ入力装置(5)が衝突が妥当であると判断すると作動される。  (もっと読む)
(もっと読む)
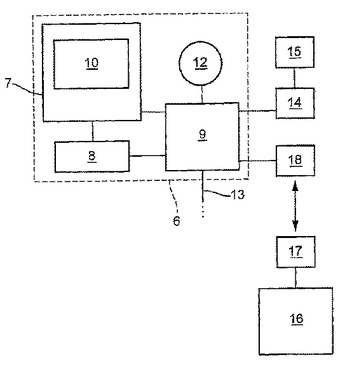
自動車用運転支援システム
本発明は、少なくとも1つの駆動ユニットと、1つのステアリング装置と、1つのブレーキ装置とを有する、電子制御式駆動伝達系を備えた、自動車、特に多用途車に関する。自動車の運転を簡素化するために、表示装置(7)と、入力装置(8)と、制御システム(9)とを備えた運転支援システム(6)が設けられる。表示装置(7)は、車両の実際の向き及び実際の位置、及び車両の比較的近い周囲状況を、モニタ(10)に表示するよう適合される。入力装置(8)は、車両の所望の向き及び所望の位置を入力するよう適合される。制御システム(9)は、運転アルゴリズム(12)を処理するように適合され、駆動伝達系を作動させて、車両の周囲状況を考慮しつつ、車両をその実際の向き及び実際の位置からその所望の向き及び所望の位置に移動する。
 (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。  (もっと読む)
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 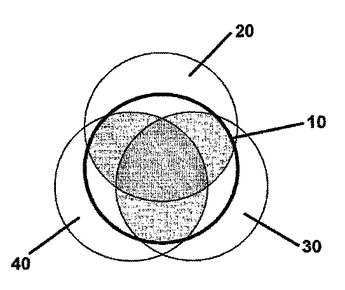 (もっと読む)
(もっと読む)
車両用舵角制御装置
【課題】前輪補助舵角付与手段、後輪補助舵角付与手段及びブレーキ装置を備えた車両用舵角制御装置において、高速走行時に車両の挙動を安定に制御可能な車両用舵角制御装置を提供すること。
【解決手段】前輪補助舵角付与手段、後輪補助舵角付与手段及びブレーキ装置を備えた車両用舵角制御装置において、舵角制御手段に、算出された前後輪補助舵角を車速が高いほど小さくする補助舵角補正部と、算出された前後輪補助舵角と補正された補助舵角との偏差を補償するブレーキ液圧を算出する偏差補償ブレーキ液圧算出部とを設けたこととした。
(もっと読む)
201 - 217 / 217
[ Back to top ]