
Fターム[3D046GG10]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | ステアリング装置 (217)
Fターム[3D046GG10]に分類される特許
141 - 160 / 217
車両用操舵装置
【課題】 簡素な構成にて、高い信頼性を確保することのできるステアバイワイヤ式の車両用操舵装置を提供すること。
【解決手段】 車両1は、各車輪3から機械的に分離されたステアリング10に入力されるステアリング操作に応じて車両1のヨーモーメントを制御するステアバイワイヤ式の車両用操舵装置11を備える。各車輪3は、その舵角の変更が不能に設けられ、車両用操舵装置11は、各車輪3に対する駆動力分配を可変可能な駆動力分配装置12と、及び該各車輪3における制動力を各車輪3毎に制御可能な制動力制御装置13とを有して構成される。そして、車両用操舵装置11は、各車輪3に伝達される駆動力、及び該各車輪3における制動力を該各車輪3毎に制御することにより、車両1のヨーモーメントを制御する。
(もっと読む)
車両の横転防止装置

【課題】車両の重心高さによらず的確な横転の予知を行い、この予知に基づき要点を防止する車両の横転防止装置を提供することにある。
【解決手段】ステアリングホイールの操舵角速度を検出する操舵角速度検出手段4と、車体5に発生するロールレイトを検出するレイトセンサ6と、エアブレーキ装置を作動させる、またはエンジン出力を低下させて、車両1の横転を防止する安全措置を講じる安全措置実行手段と、前記操舵角速度検出手段で検出された前記ステアリングホイールの操舵角速度を車速センサ7により検出された車速に基づいて、3段階のレベルに設定し、前記操舵角速度が車両1の重心高さによってはロールオーバーになり得る所定角速度以上であるレベル1となる時で且つレイトセンサ6で検出された車体5のロールレイトが横転危険性が判断できる所定値以上である時にエアブレーキ装置8を作動させる。
(もっと読む)
車線逸脱防止装置
【課題】運転者に違和感を与えることなく、最適に車線逸脱を防止できる。
【解決手段】車線逸脱防止装置は、走行車線に対して自車両が逸脱傾向にあると判定した場合に、逸脱回避側の左前輪5FLに制動力を与えるとともに、当該左前輪5FLに与える制動力により車両が旋回挙動を示すことに起因して後輪5RL,5RRに発生する路面との摩擦力を、減少させるように当該後輪5RL,5RRを転舵して、車両に車線逸脱防止用のヨーモーメントを付与する。
(もっと読む)
車両のスタック脱出装置
【課題】車両のスタックを検出した場合に自動的にスタックを脱出できる。
【解決手段】スタック脱出装置は、車両発進時に車両のスタックを検出した場合(ステップS1、ステップS2)、スタック脱出を検出するまで(ステップS7)、四輪操舵装置の機能としての逆相制御、同相制御及び張出し防止制御を禁止して(ステップS3)、駆動輪を転舵制御するとともに、当該駆動輪がスリップしないように駆動力抑制制御を行う(ステップS4)。
(もっと読む)
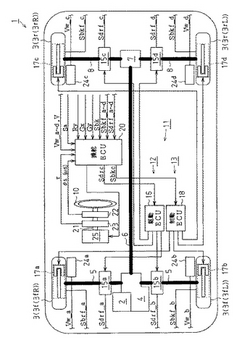
車両統合制御装置
【課題】 本発明は、優れたフェールセーフ性を維持しつつ、系列間での通信遅れ等の影響を受け難い車両統合制御装置の提供を目的とする。
【解決手段】 駆動力発生装置を制御する駆動系システムと、制動力発生装置を制御する制動系システムと、動的安定化システムとを備え、これら3つのシステムを統合的に制御する車両統合制御装置であって、運転者により操作される操作部材の操作量に応じた制御目標を仮決定する段と、仮決定した制御目標を、動的安定化システムに送信する段と、仮決定した制御目標を分配し、該分配した制御目標を、該分配した制御目標を実現すべき系のシステムに出力する段と、動的安定化システム側の補正要求を受信する段と、前記仮決定した制御目標を、前記受信した動的安定化システム側からの補正要求に応じて補正する段と、前記補正した制御目標を、該補正した制御目標を実現すべき系のシステムに出力する段と、を備える。
(もっと読む)
車両統合制御装置
【課題】 各制御ユニットの要求を適切に調停できる車両統合制御装置の提供。
【解決手段】 本発明による車両統合制御装置では、複数の制御ユニットのうちの特定のマネージャ制御ユニットが、乗員の要求又は第1の他の制御ユニット(P−DRM,DSS)からの要求に基づいた第1の物理量次元の制御目標値と、第2の他の制御ユニット(VDM)からの第1の物理量次元の要求値とを調停する第1の調停部と、第1の調停部で調停を経た第1の物理量次元の制御目標値を、第2の物理量次元の制御目標値に変換する変換部と、変換部で第2の物理量次元に変換された制御目標値と、T/M制御ユニットからの第2の物理量次元の要求値とを調停する第2の調停部と、第2の調停部で調停を経た制御目標値を、該制御目標値を実現すべきエンジン制御ユニットへと出力する出力部とを備える。
(もっと読む)
フェールセーフ制御システム及びフェールセーフ制御方法
【課題】 車両が走行することで変化する環境に応じた的確なフェールセーフ制御を実現する。
【解決手段】 障害発生時に、障害時応答としてECU10nがフェールセーフ制御状態となったことに応じて、カーナビ制御ECUが、走行している車両の現在の走行環境に関する走行環境情報を取得し、取得された走行環境情報に基づいたフェールセーフ制御用データを取得してフェールセーフ制御状態となったECU10nに送信する。そして、ECU10nが、送信されたフェールセーフ制御用データを用いてフェールセーフ制御を実行することで実現する。
(もっと読む)
車両挙動制御装置
【課題】 車体横滑り角の増加に伴う車両の片流れを防止しつつ、定常保舵時におけるドライバの操舵負担を軽減できる車両挙動制御装置を提供する。
【解決手段】 後輪3に補助舵角を与える後輪転舵装置4と、車両にヨーモーメントのみを与える各輪制駆動力配分装置5と、を有する車両挙動制御装置において、定常的に保舵トルクが必要な状況が続いている場合、定常操舵トルクがゼロに収束するように、かつ、定常的な車体横滑り角βが少なくとも増加方向に変化しないように、後輪転舵装置4と各輪制駆動力配分装置5を駆動制御する制御コントローラ10を備える。
(もっと読む)
車両挙動制御装置
【課題】 外乱による横変位とヨーレイト変化を共に抑制でき、車両挙動への影響を小さくできる車両挙動制御装置を提供する。
【解決手段】 後輪3に補助舵角を与える後輪転舵装置4と、車両にヨーモーメントを与える各輪制駆動力配分装置5と、を有する車両挙動制御装置において、車両に外乱が入力されたとき、外乱入力に伴う車両挙動変化を打ち消し、かつ、前後輪のコーナリングフォースの着力点であるニュートラルステアポイントを、外乱により車両に作用する横力の着力点と一致させるように、後輪転舵装置4と各輪制駆動力配分装置5を駆動制御する制御コントローラ10を備える。
(もっと読む)
車線逸脱防止装置
【課題】 高応答での車線逸脱防止を達成しながら、車線逸脱という状況下において、走行安全性を向上できると共に運転者への認知性も向上できる車線逸脱防止装置を提供すること。
【解決手段】 自車両が走行車線から逸脱しそうになることを判断する逸脱判断手段と、該逸脱判断手段により自車両が走行車線から逸脱しそうであることが判断された場合には、逸脱を回避する方向のヨーモーメントを左右輪の制動力差により発生させる制駆動力制御手段とを備えている。
(もっと読む)
車両挙動制御装置
【課題】 特にばね上重心点とロール軸間距離が大きな背高車において、旋回時のロール過渡応答を改善できる車両挙動制御装置を提供する。
【解決手段】 後輪3に補助舵角を与える後輪転舵装置4と、車両にヨーモーメントのみを与える各輪制駆動力配分装置5と、を有する車両挙動制御装置において、車体のロール運動により生じる横力を打ち消すように後輪転舵装置4を駆動制御し、後輪舵角制御により生じるヨーモーメントを打ち消すように各輪制駆動力配分装置5を駆動制御する制御コントローラ10を備える。
(もっと読む)
駐車制動アシスト装置
【課題】車両を適切な駐車位置で停止させることができる駐車制動アシスト装置を提供すること。
【解決手段】駐車操作時に車両1の進行方向を撮像手段2によって撮像し、撮像された画像に基づいて駐車目標位置kを決定し、駐車開始位置から駐車目標位置kまでの間で、車両の制動手段10にブレーキ力を付与して車両の駐車をアシストする駐車制動アシスト装置4に、駐車アシストを終了する駐車終了位置Eを検出する駐車終了位置検出手段23と、駐車終了位置Eと車両1との距離を算出する距離算出手段24と、距離が所定値以下となった場合に、制動手段10に対して減速制御を行う減速手段25とを設ける。
(もっと読む)
乗員保護装置
【課題】 衝突時の乗員の負傷を軽減させる乗員保護装置を提供する。
【解決手段】 左右輪へのトルク配分比を制御するトルク配分比制御装置と、車両の衝突が避けられないかどうかを判定する衝突回避判定手段(ステップS4)と、その衝突回避判定手段(ステップS4)により車両の衝突が避けられないと判定された場合に、トルク配分比制御装置を制御して、車両を乗員が負傷しにくい所定の向きまで回転させる車両方向制御手段(ステップS7)とを備える。トルク配分比制御装置により左右輪へのトルク配分比が不均一とされると、左右輪の回転速度に差が生じて車両の向きが変化する。これを利用して、衝突回避判定手段(ステップS4)により車両の衝突が避けられないと判定された場合、車両方向制御手段(ステップS7)は、トルク配分比制御装置を制御して車両を乗員が負傷しにくい所定の向きまで回転させる。従って、衝突時の乗員の負傷が軽減される。
(もっと読む)
車両の挙動制御装置
【課題】 本発明の課題は、横加速度センサでの横加速度の検出精度が低くなる状態であっても、車両の挙動を適切に制御することができる車両の挙動制御装置を提供する。
【解決手段】 ECU21は、車両がタックイン状態になる虞を推定し、タックイン状態になる虞が推定されたときに、車両の挙動を安定化させる安定化制御を行う。ECU21には、電流電圧センサ22から出力される電動パワーステアリング装置10における電動モータ13の電流値が出力される。ECU21では、横加速度センサで検出される横加速度に代えて、電流電圧センサ22で検出されたEPSアシスト電流値EPSiを利用して、タックイン状態になる虞があるか否かを判断する。
(もっと読む)
車両制御装置
【課題】グリップ余裕度が大きな通常領域において、目的とする車体フォースとヨーモーメントとを達成するためのブレーキ操舵量を低減させる。
【解決手段】ドライバが望む車体運動を得るために車体に加えるべき目標合成力と各車輪の限界摩擦円の大きさをパラメータとして含む拘束条件とに基づいて、各車輪のμ利用率を最適化する各輪の制動力及び駆動力を制御するための第1の制御量、及び各輪の操舵角を制御する第2の制御量を演算する演算手段14と、操舵角のみの制御によって目標合成力を得るための各輪の操舵角を制御する操舵制御量を演算する演算手段18と、協調制御量及び操舵制御量をパラメータρによって線形補間した制御量に基づいて、各車輪の操舵角のみ、または各車輪の操舵角及び制駆動力を制御する制御手段22とで構成されている。
(もっと読む)
車線逸脱防止装置
【課題】 高応答での車線逸脱防止を達成しながら、車線逸脱という状況下において、走行安全性を向上できると共に運転者への認知性も向上できる車線逸脱防止装置を提供すること。
【解決手段】 自車両が走行車線から逸脱しそうになることを判断する逸脱判断手段と、該逸脱判断手段により自車両が走行車線から逸脱しそうであることが判断された場合には、逸脱を回避する方向のヨーモーメントを左右輪の制動力差により発生させる制駆動力制御手段とを備えている。
(もっと読む)
車両用走行支援装置
【課題】 道路工事などが行われている場所を通過するときに、交通整理の指示に従って適切な走行支援制御を行う車両用走行支援装置を提供する。
【解決手段】走行支援制御ECUは、交通整理物体検出手段(ステップ106)が、物体検出手段(ステップ102)により検出した物体が動作によって交通整理を行う交通整理物体(交通整理をする人Ba)であるか否かを検出し、動作認識手段(ステップ108)が、この交通整理物体検出手段(ステップ106)により検出した交通整理物体の動作を認識し、走行支援制御手段(ステップ116またはステップ124)が、この動作認識手段(ステップ108)により認識した交通整理物体の動作に応じて走行支援制御を行う。
(もっと読む)
車両用走行支援装置
【課題】 ドライバの意思に合せて、走行支援制御を開始できる車両用走行支援装置を提供する。
【解決手段】 開始しきい値調整装置11を備えることで、走行支援制御が開始するか否かを決定する開始しきい値をドライバが任意に調整できるようする。このように、開始しきい値を調整できるようにすることで、ドライバの意思に応じた開始しきい値とすることができ、ドライバの意志に合った安全マージンとすることができる。すなわち、もっと車両走行速度を速くしたいのに速くできなかったり、逆にもっと安全性を確保したいのに車両走行速度が速くなり過ぎたりと、ドライバの要求を満たさないものとなることを防止することができる。
(もっと読む)
車両用アンダーステア抑制装置
【課題】アンダーステアの程度に応じて段階的に対処しつつ、車両安定化を図ることができる制御装置の提供。
【解決手段】 車両用アンダーステア抑制装置は、アンダーステアのときに操舵を抑制する電動パワーステアリング装置Sと、アンダーステア状態であることを報知する警報装置Aと、左右の前輪9,9に異なる制動力を付与して車両のモーメントを発生させる制動力配分装置Bと、を備え、アンダーステアの度合いが大きくなるにしたがって電動パワーステアリング装置Sによる反力抑制制御、報知装置A、制動力配分装置Bによる制動力配分制御の順に作動させる。
(もっと読む)
自動消火機能を備えた車両用安全装置
【課題】 車両火災の発生によって自動消火装置が消火を始めると、車両を自動的に道路の一側(車両が左側通行の国では左側、右側通行の国では右側)に片寄せて停車させることによって、後続車両から受ける二次災害の問題と、後続車両が被る衝突事故や交通渋滞の問題が発生しないように工夫した自動消火機能を備えた車両用安全装置を提供する。
【解決手段】 温度検知センサ10〜16が車両火災を検知すると、自動消火装置11〜17を作動して消火する一方、車速を減速させながら、制御装置4がハンドル制御装置23を作動して車両TRを道路の端に片寄せて停車させる。
(もっと読む)
141 - 160 / 217
[ Back to top ]