
Fターム[3D052GG02]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 旋回用操縦手段 (443) | 左右一対の旋回用レバー (35)
Fターム[3D052GG02]に分類される特許
1 - 20 / 35
自走車両
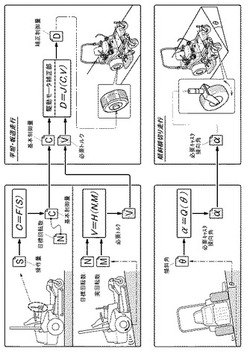
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車

【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
作業車両
【課題】走行部2の駆動構造を廉価に構成できるものでありながら、左右の走行部2の旋回操作性を向上できるようにした作業車両を提供しようとするものである。
【解決手段】左右走行部2を装設した走行機体1と、走行機体1に搭載する原動機3と、原動機3から左右走行部2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行部2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチ27と左ブレーキ28、または右操向クラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの電力消費を抑制する制御を実装された乗用作業車の提供。
【解決手段】乗用作業車は、運転座席を備えた車体と、当該車体を支持する駆動車輪ユニットと、作業デバイスを有する作業ユニットを駆動するための作業用電動機と、作業用電動機を定常モード又は当該定常モードより消費電力が少ない省電力モードで動作制御する電動機制御部と、作業用電動機の負荷を評価する作業負荷評価部とを備えている。作業負荷評価部によって評価された作業用電動機の負荷がしきい値より低い低負荷である場合に、電動機制御部は作業用電動機を省電力モードで動作させる。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
高所作業車
【課題】安全な走行を維持しつつ、作業者の乗り心地または操作フィーリングを良好に保つ高所作業車を提供する。
【解決手段】左右の駆動手段を駆動させるための走行モータと、中立位置からの操作量と操作方向に応じて走行モータの回転速度と回転方向を設定可能な操作レバーと、走行モータの回転速度を高速から低速まで選択可能な速度レンジ選択スイッチと、操作レバーの操作量および操作方向また速度レンジ選択スイッチにより選択された速度レンジに基づいて走行モータの回転方向と回転速度を制御するコントローラを備えた高所作業車において、走行制御装置が、非操作状態からターンを行う場合には走行モータの回転速度を強制的に低速に設定し、車体が直進している状態からターンを行う場合には走行モータの回転速度を変速レンジ選択スイッチにおける選択に基づいて設定する。
(もっと読む)
油圧ポンプ制御装置
【課題】建設機械の走行直進性が悪化した場合に、その走行直進性を手動で改善できる油圧ポンプ制御装置を提供すること。
【解決手段】左右の走行用油圧モータ42L、42Rのそれぞれに対応する吐出量可変の二つの油圧ポンプ10L、10Rを有する建設機械1に搭載される油圧ポンプ制御装置100は、左右の走行用油圧モータ42L、42Rのそれぞれを操作する左右の走行レバー46L、46Rとは別に、二つの油圧ポンプ10L、10Rの吐出量を個別に増減させる吐出量増減手段62を備えることを特徴とする。
(もっと読む)
油圧ポンプ制御装置
【課題】建設機械の走行直進性が悪化した場合に、その走行直進性を改善できる油圧ポンプ制御装置を提供すること。
【解決手段】油圧ポンプ制御装置100は、直進走行のためのレバー操作が行われた場合であって、油圧ポンプ10L、10Rの吐出量に差が生じていることを検出したときに、油圧ポンプ10L、10Rのそれぞれに対応する電磁式圧力制御弁により油圧ポンプ10L、10Rのそれぞれの吐出量の増減を個別に実行し、油圧ポンプ10L、10Rの吐出量が略一致したことを検出したときの電磁式圧力制御弁の制御指令値を直進走行時の直進走行条件として記録し、後に直進走行のためのレバー操作が行われたことを検出した場合に、直進走行条件として記録された制御指令値に基づいて油圧ポンプ10L、10Rのそれぞれの吐出量を再現させる。
(もっと読む)
車両の操舵装置
【課題】車両の操縦性を高める、左右ハンドルによる操舵・走行制御システムを提供する。
【解決手段】動力式の走行装置20L,20R及び旋回装置31L,31Rを有した車両10の操舵装置である。この操舵装置は、互いに独立した回転が可能に車体に取り付けられた左右の操作ハンドル81L,81Rと、左右の操作ハンドルを互いに同じ回転方向へ回転させたときの、第1の回転角に応じて旋回装置を制御する旋回制御部と、左右の操作ハンドルを互いに逆回転方向へ回転させたときの、第2の回転角に応じて走行装置の前進、後進及び走行速度を制御する走行制御部とを有している。旋回制御部及び走行制御部は制御部63に含まれている。
(もっと読む)
移動車両
【課題】従来の移動車両は、リンク機構の部品点数が増えて部品コストがアップするとともに、リンク機構の配置分だけ車両機体のコンパクト化が難しくなる、という問題があった。
【解決手段】走行駆動用の油圧ポンプ13F・13Rの上方に、ステアリングレバー21L・21Rを左右に並べて配置し、ステアリングレバー21L・21Rの前後に、油圧ポンプ13F・13Rを振り分けて配置し、油圧ポンプ13Rのトラニオン軸13Rdと、ステアリングレバー21Lとを連結する第1リンク機構48と、油圧ポンプ13Fのトラニオン軸13Fdと、ステアリングレバー21Rとを連結する第2リンク機構49と、を備える。
(もっと読む)
作業車輌
【課題】エンジンからの出力を利用して駆動される走行部を備えた作業車輌であって、車速域によらず旋回側の走行部を停止させるブレーキターンを有効に行うことができる作業車輌を提供する。
【解決手段】制御装置270は、HST102が旋回用電動モータ33L,33Rの最大出力によっても対応する走行部40L,40Rを停止状態とさせることができない高速出力状態の場合に旋回操作部材56L,56Rが操作されると、通常制御モードに代えて、旋回操作部材56L,56Rが非操作位置から最大操作位置へ操作された際にHST102の出力回転数が旋回用電動モータ33L,33Rの最大出力によって対応する走行部40L,40Rの回転数を0以下とさせ得る基準回転数Smとなるような減速制御を行うとともに旋回操作部材56L,56Rの操作量に応じて旋回用電動モータ33L,33Rの出力制御を行うブレーキターン制御を行う。
(もっと読む)
歩行型管理機
【課題】 組付けの容易な減速機構を採用しながら、サイドクラッチ機構に対する操作系の配置構成に工夫を凝らした歩行型管理機を提供する。
【解決手段】 伝動ケース2の下端部にウォーム13を前方にウォームホイール15を後方に配置してウォーム減速機構Dを構成する。ウォームホイール15の両側方にクラッチスリーブ17、17を配置して、サイドクラッチ機構Eを形成し、左右出力軸部1A、1Aに出力すべく構成してある。ウォームホイール15の上方に、サイドクラッチ機構Eを操作するクラッチシフター24、及び、連係ロッド26が配置してある。
(もっと読む)
作業機の走行システム
【課題】 走行装置が安定した状態で走行できる、特に曲進中において安定した走行を行うことができる。
【解決手段】 走行装置7に設けられて作動油により動作する左右一対の走行モータ5と、走行モータ5を1速状態又は2速状態に切り換える走行2速切換弁V4と、左右一対の走行モータ5に作動油をそれぞれ供給する一対の油圧ポンプP1,P2と、一方の油圧ポンプP1から走行モータ5に供給される作動油の第1圧力N1と他方の油圧ポンプP2から走行モータ5に供給される作動油の第2圧力N2とを検出する検出手段40と、前記検出手段40で検出された第1圧力N1と第2圧力N2との圧力差に基づいて走行モータ5を1速状態又は2速状態に切り換えるべく、走行2速切換弁V4を切り換える制御部72とを備えている。
(もっと読む)
乗用型芝刈車両
【課題】乗用型芝刈車両において、十分な走行駆動力を有し、旋回における後輪の回転速度と前輪の回転速度の間の適切な制御を行うことである。
【解決手段】乗用型芝刈車両10において、車輪40,42には、それぞれ車軸電動回転機50,52が接続され、キャスタ輪44,46には、それぞれ操向輪用電動回転機54,56が接続される。制御部100は、2レバー式操作子70の操作量に応じた旋回指示入力を取得し、その指示内容から左右車輪の速度指示を取得し、取得された左右車輪速度から旋回中心位置を求めて取得し、旋回中心位置と左右車輪速度とに基づいてキャスタ輪速度を求めて取得し、左右車輪速度とキャスタ輪速度とに基づいて各電動回転機に対する制御信号を生成し車輪40,42とキャスタ輪44,46とを旋回中心位置の周りに旋回させる。
(もっと読む)
乗用型芝刈車両
【課題】乗用型芝刈車両において、十分な走行駆動力を有し、旋回における後輪の回転速度と前輪の回転速度の間の適切な制御を行うことである。
【解決手段】乗用型芝刈車両10において、車輪40,42には、それぞれ車軸電動回転機50,52が接続される。制御部100は、標準的設定条件の下の制御とは別に、特別設定条件の下の制御を行う機能を有する。減速制御モジュール116は、標準的な走行速度よりも減速して旋回制御等を行う。片側車輪自由制御モジュール118は、旋回中心位置が片側車輪の位置であるとき、その片側車輪を自由状態にする制御を行う。旋回制限制御モジュール120は、旋回半径が小さすぎるとき、旋回半径を制限して制御を行う。
(もっと読む)
油圧駆動車両
【課題】本発明は、簡便で且つコンパクトな構造をもつ変速操作機構を備える油圧駆動車両を提供することを課題とする。
【解決手段】変速操作機構31は、機体11に取り付けられるベースブラケット41と、このベースブラケット41に第1支点42、42を介して車速設定手段25で押し引きされて揺動するように設けられる第1揺動メンバー43と、この第1揺動メンバー43から延びており、操舵手段27で引かれることで揺動する左右の第2揺動メンバー46L、46Rと、左右の第2揺動メンバー46L、46Rの各々に揺動自在に設けられる左右のリンクプレート52、52と、これら左右のリンクプレート52、52に連結されるとともにベースブラケットに回転自在に支持されるドライブプレート55L、55Rとからなる。
(もっと読む)
自走式作業機械
【課題】容易に押し引き移動又は牽引移動させることができる自走式作業機械を提供する。
【解決手段】エンジン21と、このエンジン21の動力が駆動輪17に伝達されて駆動する走行装置2と、駆動輪17への動力伝達を遮断するとともに駆動輪17を制動するためのクラッチ機構22と、操作者把持用のハンドル8に設けられ、クラッチ機構22を操作するサイドクラッチレバー23とを備えた自走式作業機械において、駆動輪17への動力伝達を遮断しかつ駆動輪17を制動させないクラッチ機構22の切換中間位置となるように、サイドクラッチレバー23の操作位置を保持するストッパ28を備える。
(もっと読む)
1 - 20 / 35
[ Back to top ]