
Fターム[3D114FA04]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め対象 (394) | ワーク取扱装置とワーク間 (223) | コンベアとワーク間 (9)
Fターム[3D114FA04]に分類される特許
1 - 9 / 9
ガラス位置決め装置およびガラス位置決め方法
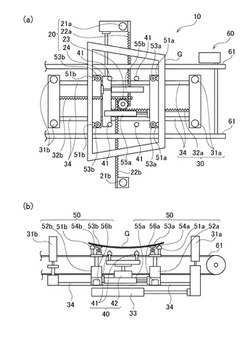
【課題】ガラスの寸法にバラつきがあったとしても、接着剤の塗布面の高さが一定になるようにガラスを位置決めすることを目的とする。
【解決手段】ガラスGに接着剤を塗布するために該ガラスを所定の位置に位置決めするガラス位置決め装置10であって、前記ガラスを挟んだ両側に配設され、前記ガラスを挟持する方向に沿って移動可能な位置決め部材31a、31bと、前記位置決め部材31a、31bの前記ガラス側にそれぞれ配設され、前記位置決め部材31a、31bが前記ガラスを挟持する方向の移動と共に移動され、前記ガラスを下方から固定する固定部材53a、53bと、を備えていることを特徴とする。
(もっと読む)
車体移載装置

【課題】簡素な構成でありながら、下側搬送手段に沿って搬送されてくる車体を上側搬送手段に正確に移載可能とする。
【解決手段】車体2を載置した状態で搬送する下側搬送手段3に沿って搬送されてくる車体2を、上側搬送手段7に移載するための車体移載装置1である。下側搬送手段3を構成するスラッド板4に設けられた車体載置部材5に対して係脱可能に設けられ、車体載置部材5に係止することによって下側搬送手段3と同期移動する同期手段10と、昇降可能に設けられ、下側搬送手段3に沿って搬送されてくる車体2をリフトアップして上側搬送手段7に移載するリフト手段20とを備える。リフト手段20は、車体2が搬送方向所定位置まで搬送されるまでの間、同期手段10と連結して同期手段10と同期移動し、搬送方向所定位置において、同期手段10からの分離を伴って車体2をリフトアップするように構成されている。
(もっと読む)
溶接接合による組立方法
【課題】コストを抑えた簡便な組み立て手法であって、かつ、設計上の条件を満足し得る溶接接合による組立方法を提案する。
【解決手段】溶接接合による組立方法は、仮組立工程と、溶接工程と、加熱工程とを含んでいる。仮組立工程は、溶接接合する部材21、22、23を組立治具30にセットし、加熱処理によって接着力が低下して剥離可能な熱剥離型接着剤36によって仮止めして仮組立体31を形成する工程である。溶接工程は、仮組立体を溶接治具40にセットし、部材同士を溶接接合して接合体41を形成する工程である。加熱工程は、接合体を加熱処理して熱剥離型接着剤を剥離して組立体51を得る工程である。
(もっと読む)
動いているワークピースへの作業を実施するための方法及び装置
本発明は、コンベヤ(16)上で連続的に前へ進んでいるワークピース(12)の作業が、ワークピースと一緒に動く産業用ロボット(18)によって特定の作業区間を同期進行している間に実施される方法及び装置(10)に関する。この場合、産業用ロボット(18)は、コンベヤ(16)の隣に延びる独立した前後方向ガイド(48)に沿って移動可能であり、同期進行している間は産業用ロボット(18)のベース部分(20)が、ワークピースキャリア(14)に固定連結され、前後方向ガイド(48)内を進む車台に関して浮動状態で支持されている。この産業用ロボット(18)は交換可能なツールを有しており、同期進行開始時に、スキャンツールが産業用ロボット(18)の作業アーム(40)に接続され、ワークピースとワークピースキャリア(14)間の相対的位置が決定される。 (もっと読む)
ガラス取り付けシステム
【課題】ガラスの取り付け作業にかかる時間を短縮でき、かつ、設備を小型化してコストを低減できるガラス取り付けシステムを提供すること。
【解決手段】ガラス取り付けシステム1は、フロントガラス11またはリヤガラス12とクォータガラス13とを搬送路21に沿って搬送する搬送装置22と、搬送路21に設けられた一対のガラス取り付けロボット27、28と、を備える。一対の取り付けロボット27、28は、フロントガラス11またはリヤガラス12を取り付ける大型ガラス取り付けロボット28と、クォータガラス13を取り付ける小型ガラス取り付けロボット27と、で構成される。搬送装置22は、フロントガラス11またはリヤガラス12とクォータガラス13とを1組として、この1組のガラスが同時に大型ガラス取り付けロボット28および小型ガラス取り付けロボット27に供給されるように、間欠的に駆動する。
(もっと読む)
コンベヤ上への車両移載装置
【課題】前後車輪間の距離が一定でない各種車両をコンベヤ上へ移載し得る構造簡単な移載装置を提供する。
【解決手段】昇降体5上の前側車輪支持手段6には、前輪Wfを搬送方向に関して定位置で支持する閉じ姿勢と当該前輪Wfの搬送方向への脱出を許す開放姿勢との間で水平に開閉自在な前後一対の車輪支持アーム29a,29bが設けられ、昇降体5上の後ろ側車輪支持手段7には、搬送方向に関する位置決めをしないで後輪Wrを支持する車輪支持板38が、水平姿勢と搬送方向へ前下がりに傾斜する傾斜姿勢とに切換え自在に設けられ、前側車輪支持手段6の閉じ姿勢にある車輪支持アーム29a,29bと後ろ側車輪支持手段7の水平姿勢にある車輪支持板38とで車両Cを支持した昇降体5が少なくともコンベヤ1上に車両Cを移載する下降限位置にあるとき、後ろ側車輪支持手段7の車輪支持板38を傾斜姿勢とする姿勢切換え手段40が設けられた構成。
(もっと読む)
部品組立装置
【課題】第1、第2部品を互いに平行に、かつ、一方向に向かってそれぞれ搬送可能とし、これらの搬送状態で、第1、第2部品を互いに組み付ける場合に、この組み付けの作業が容易にできるようにする。
【解決手段】部品組立装置1は、第1部品3を一方向Aに向かって第1搬送速度V1で搬送可能とする第1搬送ライン26と、第1搬送ライン26と平行に延び、各第2部品4を一方向Aに向かって第2搬送速度V2で搬送可能とする第2搬送ライン27とを備える。一方向Aに向かって順次設定された複数の組み付け域で、第1部品3と第2部品4のそれぞれとが順次組み付けられる。第1搬送ライン26により搬送される第1部品3と第2搬送ライン27により搬送される第2部品4のそれぞれとの一方向Aにおける互いの相対位置が、各組み付け域でそれぞれ変更可能となるよう第1、第2搬送速度V1,V2の互いの相対速度を可変にする。
(もっと読む)
ドライブシャフトユニットの移送装置
【課題】軸方向に沿った全長が可変に設けられたドライブシャフトユニットを位置決めして保持することにある。
【解決手段】等速ジョイント16を把持する第2チャック60bと、等速ジョイント14を把持する第3チャック60cと、ドライブシャフトを把持する第5チャック60eとが横方向に沿って所定距離離間して並設された第1把持部42aと、等速ジョイント16を把持する第1チャック60aと、ドライブシャフトを把持する第4チャック60dとが横方向に沿って所定距離離間して並設された第2把持部42bと、ドライブシャフトユニット20に対する把持を前記第1把持部42aと前記第2把持部42bとの間で切り換える第1多関節ロボット30aとを備える。
(もっと読む)
パネルワークの移載装置及び移載方法
【課題】 コストアップさせることなくパネルワークの持ち帰りを防止するに好適なパネルワークの移載装置及び移載方法を提供する。
【解決手段】 ハンドリングロボット1によりパネルワークWを位置決めしつつ移載するパネルワークの移載装置であり、移載先装置2にパネルワークWの穴若しくは縁にパネル面方向から係合する係合手段27を設け、前記ハンドリングロボット1は、パネルワークWを移載先装置2上でパネル面方向に移動させることにより前記係合手段27とパネルワークWの穴若しくは縁とを係合させた後、パネルワークWの把持を解除して離脱するようにした。
(もっと読む)
1 - 9 / 9
[ Back to top ]