
Fターム[3D114FA06]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め対象 (394) | ワーク取扱装置とワーク間 (223) | リフターとワーク間 (11)
Fターム[3D114FA06]に分類される特許
1 - 11 / 11
車体とパワープラントの結合方法および結合設備
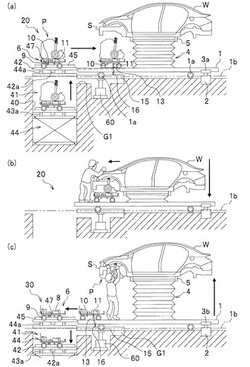
【課題】パワープラントを容易に車体に結合可能な車体とパワープラントの結合方法および結合設備を提供する。
【解決手段】車体Wを昇降自在に載置する昇降装置4を有し、フロアレベルの車体搬送ライン上を移動する搬送台車1と、パワープラントPを載置する載置パレット6と、載置パレット6を搬送台車1に移載する移載手段と、を有し、昇降装置4により車体Wを上昇させた状態で、載置パレット6を移載手段により搬送台車1に移載し、次いで、昇降装置4により車体Wを下降させてパワープラントPの上部取付部と車体側の取付穴とを締結して両者を一体にし、次いで、昇降装置4により車体Wを上昇させてパワープラントPの下部取付部と車体側の取付穴とを締結する。
(もっと読む)
車体組立ライン、および車体組立ラインにおけるバンパーの組み付け方法

【課題】作業者Mが無理な姿勢による組み付け作業を回避して作業性を向上させる。
【解決手段】フロアコンベアFCに配設された搬送台車2で車体Wを搬送しながらバンパーBを組み付ける車体組立ラインにおけるバンパーの組み付け方法であって、搬送台車2に配設された昇降手段3に車体Wを載置して、昇降手段3により車体Wを昇降させて所定の高さにした状態でバンパーBを車体Wに締結し、車体Wのエンジンルーム内部品の組み付け工程(Z41)、およびトランクまたはテールゲート廻りの部品組み付け工程(Z42)よりも下流であって、タイヤ組み付け工程(Z43)よりも上流でバンパーを組み付ける。
(もっと読む)
車体移載装置
【課題】簡素な構成でありながら、下側搬送手段に沿って搬送されてくる車体を上側搬送手段に正確に移載可能とする。
【解決手段】車体2を載置した状態で搬送する下側搬送手段3に沿って搬送されてくる車体2を、上側搬送手段7に移載するための車体移載装置1である。下側搬送手段3を構成するスラッド板4に設けられた車体載置部材5に対して係脱可能に設けられ、車体載置部材5に係止することによって下側搬送手段3と同期移動する同期手段10と、昇降可能に設けられ、下側搬送手段3に沿って搬送されてくる車体2をリフトアップして上側搬送手段7に移載するリフト手段20とを備える。リフト手段20は、車体2が搬送方向所定位置まで搬送されるまでの間、同期手段10と連結して同期手段10と同期移動し、搬送方向所定位置において、同期手段10からの分離を伴って車体2をリフトアップするように構成されている。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】互いに隣接しつつこの隣接する方向に対して交差する方向にずれた位置にある複数のワークであっても容易に把持できるようにする。
【解決手段】ワーク把持装置1は、4つのワーク把持ユニット5,7,9,11により4つの部品13,15,17,19をそれぞれ個別に把持する。部品13,15の上に部品17,19が載せられる。部品13,15を把持するワーク把持ユニット5,7は、上下シリンダ27,27Aを備えており、下端のアーム37,37Aが把持フレーム3に対して上下動可能である。4つのワーク把持ユニット5,7,9,11で4つの部品13,15,17,19を把持した状態で、ワーク把持装置1全体を上昇させると、上下シリンダ27,27Aが伸長して部品13,15が部品17,19に対して下方に離間した位置関係となる。
(もっと読む)
バッテリ搭載装置
【課題】 車両の傾斜に係らずバッテリを着脱可能なバッテリ搭載装置を提供すること。
【解決手段】 バッテリを載置して固定するバッテリ固定手段の傾斜状態を調整し、この調整された傾斜状態で車両の下面からバッテリを取り付けることとした。
(もっと読む)
ワーク搬送装置およびワーク設置方法
【課題】ワークの周縁部を均一な力で被設置物に押圧することが可能なワーク搬送装置およびワーク設置方法を提供する。
【解決手段】把持具20によりリアガラス5を把持し、把持したリアガラス5を支持アーム10の動作により車体7の窓枠7aまで搬送するとともに、窓枠7aに対して押圧しつつ設置するワーク搬送装置1であって、前記把持具20の各吸着パッド30は、該吸着パッド30にかかる力を検出可能な力検出センサ31を備え、ワーク搬送装置1の制御装置80は、前記窓枠7aにリアガラス5を設置する際に、前記各吸着パッド30の力検出センサ検出値31の大きさに基づいて、前記支持アーム10の動作を制御する。
(もっと読む)
ワーク把持装置
【課題】ロボットに連結されるフレームと、そのフレームに支持された第1乃至第3のクランプ装置を有し、第1乃至第3のクランプ装置のクランプをワークに係合させて、該ワークを把持するワーク把持装置において、1台のワーク把持装置によって各種形態のワークを把持して運搬できるようにする。
【解決手段】第2のクランプ装置9Aを第1のクランプ装置9に対して接近又は離隔する方向に移動可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのピンクランプ14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
走行設備
【課題】 走行設備の安全性および作業性の向上
【解決手段】 この走行設備10は、所定の走行経路に沿って走行する走行装置15と、床下18で走行装置15に追従して動く追従装置21と、走行装置21の真下を通るように床19に形成した溝20を通して、走行装置15と追従装置21とを連結する連結部22を備えた走行設備において、溝20を閉塞するように溝20に設置し、走行装置21の走行に従動するプレートチェーン30を備えたものである。この走行設備10は、走行装置15の走行に従動するプレートチェーン30により、溝20が閉塞されているから、作業者が溝20に足を取られたり、部品が溝20に落ちたりすることがなく、走行設備10の安全性および作業性が向上する。
(もっと読む)
ワーク位置決め支持装置及びワーク位置決め支持方法
【課題】 多車種のワークを1種類のワーク位置決め手段で位置決め支持して搬送することができ、しかも組立ライン上の各工程に配置された治具などと干渉しないようにする。
【解決手段】 エンジンコンプリート4(ワーク)を位置決めして支持するロケートピン11と、このロケートピン11を先端部に取り付けたアーム8、8と、このアーム8、8の基端部を中心として該アーム8、8を閉じた状態と開いた状態に開閉自在とし、該アーム8、8の先端に取り付けたロケートピン11を係合位置と非係合位置にそれぞれ配置させるアーム開閉手段と、これらロケートピン11、アーム8、8及びアーム開閉手段とからなるワーク位置決め機構部9全体を、エンジンコンプリート4に対して接近離反させる昇降手段と、ワーク位置決め機構部9及び前記昇降手段を載せたテーブル10を、前記エンジンコンプリート4を位置決め支持する位置へと移動させる移動手段とを備える。
(もっと読む)
部品位置決め方法及びその装置
【課題】 自動車ボディなどの部品組付け対象物に対して、自走機により支持された部品を容易・確実に位置決めできるとともに、人的労力の削減を図り、作業効率性のよい部品位置決め技術を提供する。
【解決手段】 自動車ボディWに対して、自走機1に支持された部品Pを位置決めするに際し、自走機1から引き出し・巻き取り自在自在ワイヤ2bの先端にターゲットマーカ6を取り付け、ターゲットマーカ6を自動車ボディWの下面に装着したときのワイヤ2bの引き出し長さと、存在位置を検出して、基準の引き出し長さ、基準位置との誤差をゼロにするよう制御手段5で制御し組付ける。組付けが完了すると、取外し・回収機構により自動車ボディWからターゲットマーカ6を自動的に取り外す。
(もっと読む)
車両のサスペンション搭載方法及び搭載装置
【課題】 作業者による工数を減らし、作業効率を高められる車両のサスペンション搭載方法及び搭載装置を提供する。
【解決手段】 車両を吊り上げて搬送する搬送ハンガー10と、リヤサスペンションを昇降可能に搭載して搬送する搬送リフターとを備え、搬送リフターがリヤサスペンションを持ち上げて車両に組み付けるサスペンション搭載装置において、搬送ハンガー10と搬送リフターが移動する領域に沿って延びるガイドレール50を設置し、このガイドレール50に従動して車両を押さえる車両押さえ機構30を搬送ハンガー10に備え、車両押さえ機構30が車両を押さえた状態で搬送リフターがリヤサスペンションを持ち上げて車両に組み付ける構成とする。
(もっと読む)
1 - 11 / 11
[ Back to top ]