
Fターム[3D232CC20]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC20]に分類される特許
781 - 800 / 800
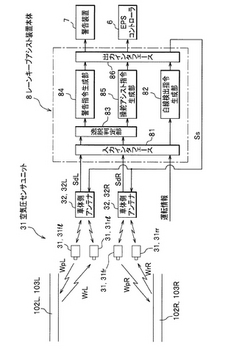
レーンキープアシスト装置
【課題】 専用の装置を設置することなく、走行車線からの車両の逸脱を効果的に抑制できるレーンキープアシスト装置を提供する。
【解決手段】 レーンキープアシスト装置本体8は、車両の運転情報や車体側アンテナ32からの白線信号Sdの入力に供される入力インタフェース81と、運転情報に基づいて白線検出指令Ssを生成する白線検出指令生成部82と、白線信号Sdに基づいて車両の走行車線からの逸脱を判定する逸脱判定部83と、逸脱判定部83の判定結果に基づき警告指令を出力する警告指令生成部84と、逸脱判定部83の判定結果に基づき操舵アシスト指令を出力する操舵アシスト指令生成部85と、警告装置7への警告指令やEPSコントローラ6への操舵アシスト指令の出力等に供される出力インタフェース86とを備えている。
(もっと読む)
駐車支援システム

【課題】 運転手が自車両を駐車させる場合の操作性を高めると共に、運転を適切に支援する。
【解決手段】 駐車支援ECU2は、自車両が後退中にあるときに操舵を反転して操舵角を最大にした場合の自車両の予測進路を算出し、その算出された予測進路上にあって自車両の方向が駐車スペースの方向に対して略平行となる操舵反転目安位置を表すマーカを鳥瞰画像上に重畳して表示する。マーカと駐車スペースとの相対的な位置関係から操舵を反転して操舵角を最大にすべきタイミングを運転手に認識させることが可能となる。
(もっと読む)
ステアリング装置を備える車両
【課題】ステアリング軸を分割して構成する簡単な構造で、かつ低コストで操向輪を左右に旋回することが可能である。
【解決手段】操向ハンドルと、この操向ハンドルの操作により操向輪を左右に旋回するステアリング軸とを有するステアリング装置を備える車両であり、ステアリング軸を上下に分割し、分割した上側分割ステアリング軸の旋回に基づき車両直進位置から右方向または左方向へのハンドル切り角を検出するハンドル切り角検出手段と、検出したハンドル切り角情報に基づき前記分割した下側分割ステアリング軸を旋回するステアリング軸駆動手段と、上側分割ステアリング軸の旋回力に対して反力を与え、旋回力の解除で初期位置へ戻る反力機構とを備える。
(もっと読む)
走行支援誤制御検出システム、車載検出システム及びセンター装置
【課題】 ユーザが実際に使用する市場での実績を十分に反映してアルゴリズムの新規開発を実施でき、走行支援システムの機能向上を十分に実現できるようにする。
【解決手段】 走行支援誤制御検出システム1において、車載検出システム5は、走行支援システム16が所定のアルゴリズムに基づいて車両走行を自動制御しているときにユーザが車両走行を走行支援システムの自動制御に反して手動制御するための操作を行うと、車載検出システム5が時刻や車両位置や走行支援システム16の版数や判定値を誤制御情報としてセンター装置9へ送信する。センター装置9は、車載検出システム5から送信された誤制御情報を収集して解析してユーザが車両走行を手動制御するための操作を行った原因を特定する。
(もっと読む)
駐車支援装置
【課題】 誘導可能な初期位置・姿勢の範囲を拡大した駐車支援装置を提供する。
【解決手段】 駐車位置Gに対する車両の初期位置Aを測定して、A点からG点への経路を生成し、これにに基づいて自動操舵または運転者の操舵支援を行うことで車両の誘導を行う駐車支援装置において、任意の偏向角からG点での偏向角へと移行する基本経路と、A点とG点との位置関係と、からA点からG点へと至る経路生成を可能とする上記任意の偏向角が満たすべき条件を求め、設定した条件から目標偏向角θpを設定し、A点から偏向角をこの目標偏向角θpへと修正するB点を通る誘導経路を算出してこれに基づいて車両を誘導する。
(もっと読む)
運転支援装置および方法
【課題】落ち着いて操作を行うことができ、安全な運転支援装置および方法を提供する。
【解決手段】自車両に備えられ、自車両の周囲の映像を撮影する撮影手段11と、撮影手段11により撮影された映像を元に、自車両を俯瞰した画像を生成する画像処理手段12と、画像処理手段12により生成された画像を表示する表示手段14と、画像処理手段12により生成された画像上に、運転操作補助情報として、自車両の前方障害物に対する接触防止用の逆L字型ガイド1と、該自車両の操舵量に応じて変化し、該自車両の駐車予定位置を示す駐車予定位置ガイド2を、表示手段14に重畳して表示させる制御手段13とを有する。
(もっと読む)
車両のレーン走行支援装置
【課題】 ナビゲーション装置の検出情報に基づき車両進行方向の道路曲率を演算すると共に、走行レーン検出手段の検出情報等に基づき道路曲率を演算し、これらを照合して推定した道路曲率に基づき車両のレーン走行支援を行う安価な装置を提供する。
【解決手段】 操舵制御手段(電動パワーステアリングシステム)と、走行レーン検出手段(カメラ等)を備え、その検出結果と車両の操舵状態及び走行状態に応じて、修正操舵を行ない車両の走行レーン内の走行を支援する。特に、車両状態量演算手段の演算結果及び状態検出手段の検出結果に基づいて演算した第1の道路曲率と、ナビゲーション装置NAVが検出した車両の進行方向の所定距離分の位置座標に基づいて演算した第2の道路曲率に基づき、車両進行方向の道路曲率を推定し、この道路曲率並びに車両の操舵状態及び走行状態に基づき目標状態量を設定する。
(もっと読む)
駐車支援装置
【課題】 駐車枠への目標軌跡に沿って駐車させると共に、運転者のステアリングホイール操作の介入によって容易に駐車位置の微調整を可能とさせる。
【解決手段】 所望の駐車位置に駐車させる運転操作を支援するために、目標駐車位置設定部13で目標駐車位置、自動駐車軌跡算出部15で自動駐車軌跡を算出すると、当該自動駐車軌跡を中心としてステアリング反力領域設定部17でステアリング反力低領域及びステアリング反力高領域を設定する。そして、ステアリング制御部16によって自動操舵させている時に領域判定部19により、自車両位置を現在位置検出部18で検出して目標駐車位置までの距離を算出し、目標駐車位置よりも手前であって距離が大きいほど、自動駐車軌跡からステアリング反力高領域にずれた場合のステアリング反力を高くし、目標駐車位置を通過した場合には、ステアリング反力高領域におけるステアリング反力を低くする。
(もっと読む)
車両用操舵制御装置
【課題】走行路に沿って車両を走行させる操舵アシストトルクを演算するとき、適正な演算を可能にして車両用操舵制御の精度を向上させる。
【解決手段】画像情報に基づいて車両が現在位置する地付近の、走行路の曲率1/R、横ずれ量ydあるいは車両偏向角θhを用いて操舵アシストトルクTLを演算する。即ち、離間した遠い位置の情報ではなく、車両位置付近の精度の高い情報に基づいて得たパラメータに基づいて操舵アシストトルクTLKを算出すると共に、ヨーレートを用いずに操舵アシストトルクTLKを算出する。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサ出力を制御量として入力してアクチュエータの操作量を決定してアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、検出されたヨーレートと、予め設定された規範ヨーレートとのヨーレート偏差を算出するヨーレート偏差算出部102と、センサ出力と算出されたヨーレート偏差を変数として入力し、アクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両用走行区分線認識装置
【課題】撮影画像を合成するとき、合成された画像から遠方の走行区分線に対応する点列が欠落することがなく、よって走行区分線を精度良く正確に認識できるようにした車両用走行区分線認識装置を提供する。
【解決手段】車両の進行方向の路面を含む領域を撮影するカメラなどの撮影手段と、撮影された撮影画像中の路面上の少なくとも白線などの破線状の走行区分線を認識可能な区分線認識手段と、異なる時刻に撮影された複数の撮影画像を合成して撮影画像中の走行区分線の長さを延長する画像合成手段(S10からS16)とを備える車両用走行区分線認識装置において、画像合成手段は、区分線認識手段による走行区分線の認識処理における撮影画像中の少なくとも走行区分線の形状に変化を与えない処理段階、具体的にはエッジ検出前の段階で(S12)で撮影画像を合成する。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサの出力を制御量として入力してアクチュエータの操作量を決定し、決定した操作量に基づいてアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、複数個のセンサの出力を変数として入力し、制御システムのアクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両のレーン走行支援装置
【課題】 走行中の車両に対し横風等の外乱が加えられた場合にも、操舵制御装置による車両のレーン走行支援を円滑に行なう。
【解決手段】 操舵制御手段(電動パワーステアリングシステム)と、走行レーン検出手段(カメラ等)を備え、走行レーン検出手段の検出結果と車両の操舵状態及び走行状態に応じて、走行レーン内における車両の状態量を推定演算し、目標状態量との比較結果に応じて操舵制御を行ない車両の走行レーン内の走行を支援する。特に、車両のステアリングモデルに基づき車両に対する外乱量を推定演算し、この外乱量に基づき目標状態量と推定状態量の比較結果を修正し、この修正結果に応じて操舵制御を修正する。
(もっと読む)
自動車を支援して車庫入れさせるための方法および装置
自動車(1)を駐車余地に支援しながら車庫入れさせるための方法および装置が提案される。この方法は次のステップを有している:
− 駐車余地に向かって走り、
− 自動車(1)に配置されているセンサ(16)を用いて駐車余地(20)を測量し、
− 目標車庫入れパスを計算しかつ該目標車庫入れパスをディスプレイ(15)に指示し、
− 実際車庫入れパスをディスプレイ(15)に指示して、該実際車庫入れパスが目標車庫入れパスに整合できるようにする。  (もっと読む)
(もっと読む)
駐車支援システムおよび駐車支援または自動駐車を行う方法
ドライバーが自動駐車または駐車支援のためにステアリング介入制御を要求できる、駐車アシスタント装置およびステアリングアクチュエータを備えた車両の駐車支援または自動駐車を行う駐車支援システムに関する。本発明によれば、ドライバーの側からこの要求があったとき、関連するシステム機能の確実性検査が行われ、少なくとも、駐車アシスタント装置の制御装置にエラーがないか、ステアリングアクチュエータの制御装置にエラーがないか、2つの制御装置間の通信にエラーがないか、および、自動ステアリング介入制御が要求されたか否かが検査され、これらの条件が満足されない場合には要求されたステアリング介入制御が行われない。  (もっと読む)
(もっと読む)
車両用ステアリングシステム
本発明は、車両用ステアリングシステム(2)、特に油圧作動のパワーステアリングシステムに関するもので、当該システムは、ステアリング部材(3)の一端を第1回転要素(6)を用いてステアリングバルブのロータリースライドバルブまたはロータリーピストン(4)に接続しているステアリングシャフト(2)を備えている。このステアリングシステム(1)は、ステアリング機構の(9)の出力要素(8)を作動させる油圧サーボモータ(7)と、油圧サーボモータ(7)の作動空間内での高圧媒体の流れを制御するステアリングバルブ(5)と、電動サーボモータ(10)によってさらに作動される出力要素(8)と、を備えている。本発明は、安全性を内包した油圧サーボモータが機械式ステアリング部材と電動サーボモータとの両方によって支援されるステアリングシステムを提供することを目的としている。このため、電動サーボモータ(10)とステアリングシャフト(2)は、第1回転要素(6)とロータリースライドバルブまたはロータリーピストン(4)との間に位置する共通回転要素(11)上で作動する。  (もっと読む)
(もっと読む)
動力操縦システム
【課題】
最適な運転者支援と同時に操縦快適性とを保証する操縦システムと方法を提供すること【解決手段】
動力操縦システムは、追加操縦トルクを積極的に印加する手段と、同時に重畳操縦角度を積極的に印加する手段とを有する。  (もっと読む)
(もっと読む)
車線装置、選択装置、及び車両の車線判定方法
本発明は、車線装置(30)、車両(10)の車線を判定する方法、及び車線装置(30)と相互作用する選択装置に関する。車線装置(30)は、少なくとも1つの距離センサ(58、59、65)の距離データ(60、61、66)を評価するための評価手段(32、35、37)を含み、該距離センサによって、距離データ(60、61、66)から、少なくとも部分的に、車線の横に基本的に連続して延びる参照物体(62、64)からの側方距離(d1−d4)を決定することが可能である。評価手段(32、35、37)は、距離データ(60、61、66)を基に車線データ(36)を決定するよう構成されている。本発明によると、さらに評価手段(32、35、37)は、特に車線付近に存在する車両(17)又は参照物体(62、64)の不連続性(63)によってもたらされる、誤った情報を、距離データ(60、61、66)から、除去するように構成されている。  (もっと読む)
(もっと読む)
アクティブな車線維持支援装置
本発明は、車両運転者の状態を監視するために使用される方法に関する。車両が走行する車道区分線(3)が検知され、走行方向が決定され、車両は車線にとどまるために、前記車線を進まなければならない。車両運転者は、車線にとどまるために、ハンドルの自動センタリングによって支援される。車両が所定の時間にわたって決定された走行方向を正確に進む場合には、これは、運転者が積極的に車両のかじを取っていないというサインであり、警告信号が発せられる。  (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。 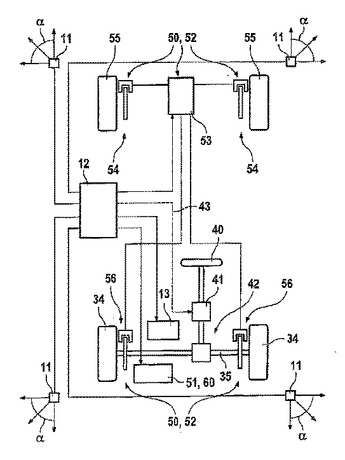 (もっと読む)
(もっと読む)
781 - 800 / 800
[ Back to top ]